|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Характеристический полином скорректированной САУ ⇐ ПредыдущаяСтр 4 из 4
Легко видеть, что в результате последовательной коррекции порядок САУ изменился на четвертый. Ниже приведен фрагмент расчетного файла, реализующего расчет переходной характеристики скорректированной САУ по задающему воздействию.
Расчет переходной характеристики скорректированной САУ
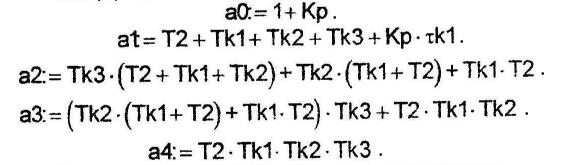
Коэффициенты характеристического полинома
Характеристический полином и его производная
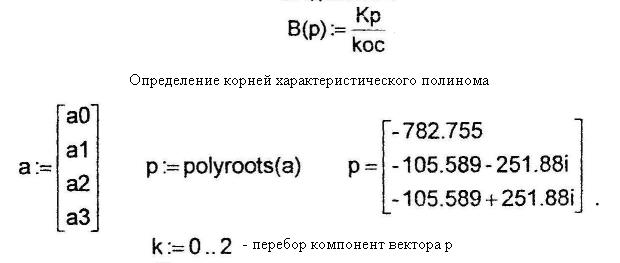
Числитель передаточной функции замкнутой САУ по задающему воздействию
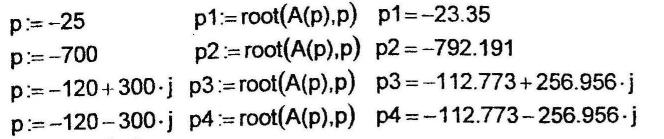
Определение корней характеристического полинома
Уравнение переходной характеристики
Расчет переходной характеристики
Показатели качества переходного процесса
В рассчитанном варианте показатели качества регулирования намного лучше, чем заданные. Их можно приблизить к заданным путем уменьшения частот w3 и w4. Например, при w3 = 350 и w4= 458 удается получить значения d = 24, 976% и tпп = 0, 034с. Ниже приведен фрагмент расчетного файла, подтверждающий этот факт.
Задание частот сопряжения w3 и w4 (окончательное)
Характеристический полином и его производная
Вектор коэффициентов характеристического полинома и его корни
Расчет переходной характеристики Показатели качества переходного процесса
Б) перерегулирование
Коррекция САУ (вариант 2)
Произведем стыковку ЛАЧХ не скорректированной САУ Ga(w) и линии Ga1(w) на уровне G0, определив при этом с помощью функции Find частоту w2, соответствующую пересечению линии Ga1(w) и уровня G0. Тогда желаемая ЛАЧХ и ЛАЧХ корректирующего устройства будет сформирована следующим набором операторов: Ниже приведен фрагмент расчетного файла, соответствующий принятому способу формирования желаемой ЛАЧХ, выполненный с учетом ранее описанного алгоритма формирования ее отрезков при частотах w3 = 400 и w4 = 590 (в нем нет определения частоты среза Ga1(w)). В этом случае форсирующими звеньями компенсируются постоянные времени Т1, Т2 и Т3, а передаточная функция корректирующего устройства будет иметь вид
Коррекция САУ (вариант 2) Определение частоты сопряжения отрезков G0 и Ga1(w)
Параметры корректирующего устройства, необходимые для расчета
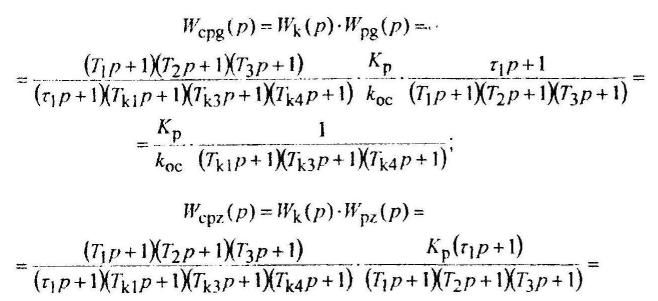
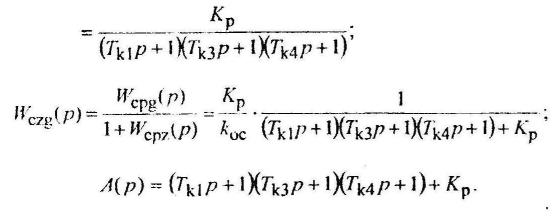
Получим передаточные функции и характеристический полином скорректированной таким образом системы:
Таким образом, за счет указанных компенсаций порядок скорректированной САУ не изменился, а изменилось только соотношение между ее новыми постоянными времени. Ниже приведен фрагмент файла, иллюстрирующий расчет переходной характеристики такой САУ.
Расчет переходной характеристики скорректированной САУ. Коэффициенты характеристического полинома
Числитель передаточной функции замкнутой САУ по задающему воздействию
Уравнение переходной характеристики
Расчет переходной характеристики
Показатели качества регулирования
Б) перегулирвоание Таким образом, оба варианта коррекции САУ дают практически одинаковый вариант (во втором варианте немного выше быстродействие при одном и том же перерегулировании).
Следует сделать несколько замечаний: 1.8.1 При рассматриваемом способе формирования желаемой ЛАЧХ крайне редко удается выполнить требования одновременно по двум параметрам tпп и d. Поэтому, достаточно обеспечить один из них (например, перерегулирование), а второй – как получится. 1.8.2 Рассмотренный способ коррекции САУ позволяет обеспечить заданное перерегулирование только тогда, когда постоянная времени в цепи обратной связи много меньше постоянных времени других инерционных звеньев САУ (в рассмотренном примере она равна нулю). Если это условие не выполняется, то перерегулирование может получиться очень большим. Тогда частоты w3 и w4 следует выбирать такими, чтобы обеспечивалось заданное время переходного процесса. 1.8.3 Возможное увеличение порядка системы (при наличии колебательного звена, он может достигать шестого) не влияет на обеспечение требуемых показателей качества регулирования для скорректированной САУ.
Популярное: |
Последнее изменение этой страницы: 2016-05-28; Просмотров: 784; Нарушение авторского права страницы