|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
В курсовой работе необходимоСтр 1 из 4Следующая ⇒
Введение
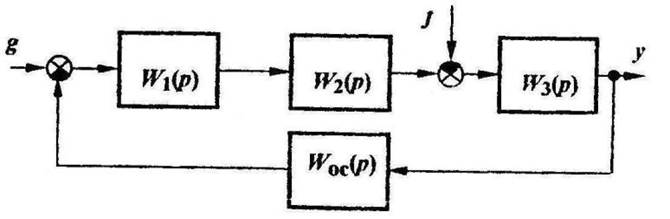
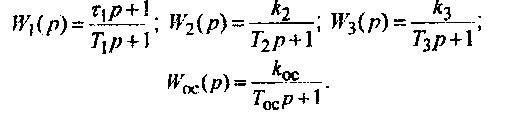
Теория автоматического управления (ТАУ) является одной из наиболее важных общетехнических дисциплин, и ее изучение опирается на ряд фундаментальных общеобразовательных и общетехнических дисциплин – математики, информатики, общей электротехники и электроники и т.д. Целью настоящей курсовой работы является самостоятельное закрепление теоретических знаний по непрерывным линейным системам автоматического управления, полученных на лекциях, практических занятиях и лабораторных работах. Курсовая работа предусматривает самостоятельное выполнение синтеза и анализа следящей САУ. Синтез производится с помощью ЛАЧХ и ЛФЧХ. Система интегрированного программирования MathCad является хорошим инструментальным средством для решения задач ТАУ. Основы пользования пакетом изучались в курсе «Спец. Главы информатики». При решении задач по курсу ТАУ необходимо знать и использовать дополнительные возможности пакета, как формирование функций из отрезков прямых линий, определение корней линейных алгебраических уравнений, решение трансцендентных уравнений, нанесение на график логарифмической шкалы, интерполяция и математическая регрессия для данных, представленных в виде векторов. Приобретенные навыки приемов и методов, применяемых при анализе и синтезе систем автоматического управления, будут использованы в изучении дисциплин «Автоматизированный электропривод», «Моделирование систем». Структурная схема исследуемой системы показана на рис.1.
Рис.1.
В курсовой работе необходимо 1. Определить типовые звенья, входящие в структуру САУ. 2. Определить передаточные функции САУ и ее характеристический полином. 3. По критерию устойчивости Гурвица определить устойчивость САУ, рассчитать граничное значение коэффициента передачи разомкнутой цепи и построить область устойчивости САУ относительно варьируемых параметров Х1 и Х2. 4. Построить статические и внешние характеристики для заданной САУ и для САУ, у которой значение параметра Х2 выбрано в соответствии с заданным запасом устойчивости по амплитуде DG. Рассчитать статизм для обоих вариантов САУ и сравнить полученные результаты. 5. Для САУ, у которой значение параметра Х2 выбрано в соответствии с заданным запасом устойчивости по амплитуде DG, рассчитать асимптотическую и точную ЛАЧХ, точную логарифмическую фазовую частотную характеристику (ЛФЧХ) и определить запас устойчивости по фазе Dj. 6. Для замкнутой САУ, у которой значение параметра Х2 выбрано в соответствии с заданным запасом устойчивости по амплитуде DG, рассчитать амплитудную (АЧХ) и вещественную (ВЧХ) частотные характеристики и определить по ним показатели качества регулирования. 7. Для замкнутой САУ, у которой значение параметра Х2 выбрано в соответствии с заданным запасом устойчивости по амплитуде DG, рассчитать переходные характеристики по задающему g и возмущающему ¦ воздействиями, определить по ним показатели качества регулирования и сравнить результаты с ранее полученными. 8. Исходя из заданного времени переходного процесса tпп и перерегулирования d = 25% провести синтез последовательного корректирующего устройства и рассчитать переходную характеристику скорректированной САУ по задающему воздействию. Определить показатели качества регулирования для этой САУ и сравнить их с ранее рассчитанными.
Курсовая работа выполняется в виде расчетного файла с использованием пакета MathCad. Расчеты необходимо снабжать текстовыми комментариями и выводами.
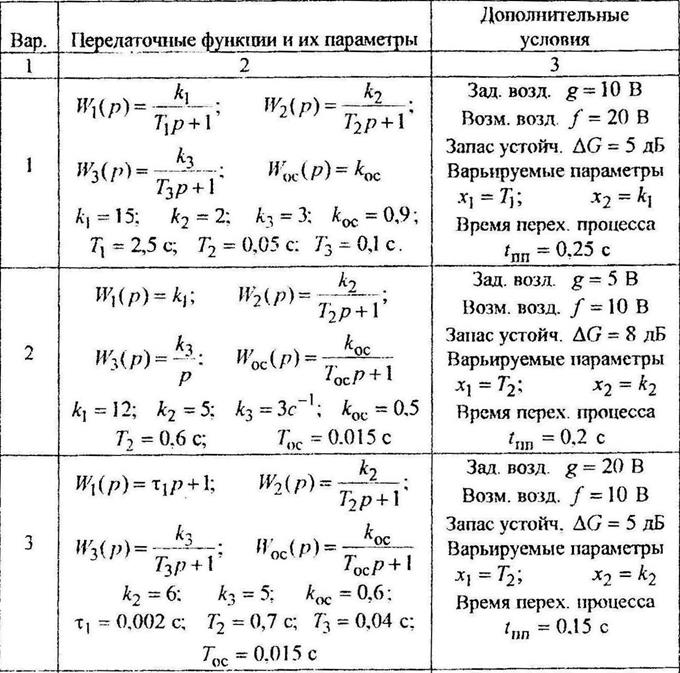
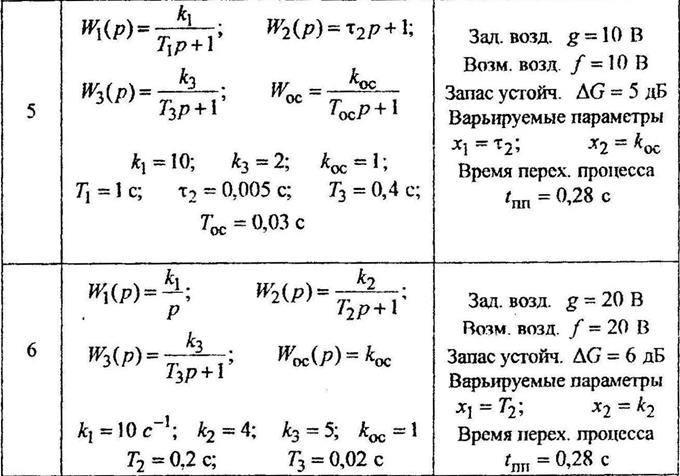
Вариант курсовой работы выдается преподавателем. Исходные данные для вариантов курсовой работы приведены в приложении П1, а пример ее выполнения в разделе 1.
Пример выполнения курсовой работы. 1.1 Исходные данные к схеме приведены на рис.1.
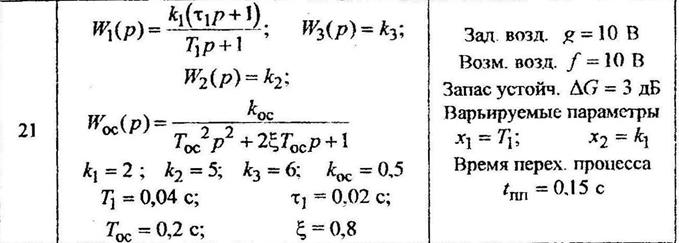
Параметры звеньев и варьируемые параметры приведены в табл.1.
Таблица 1.
Примечание: в табл.1 ¦m – максимальная величина возмущающего воздействия; g – задающее воздействие; DG – запас устойчивости по амплитуде; tпп – время переходного процесса (в секундах).
Исходные данные k2: =5 k3: =6 koc: =0.6 t1: =0.005 T1: =0.01 T2: =0.4 T3: =0.04 g: =10 f: =5 DG: =8 Коэффициенты характеристического полинома САУ Kp: =k2 k3 koc a0: =Kp+1 a1: =T1+T2+T3+Kp t1 a2: =(T2+T3) T1+T2+T3 a3: =T1 T2 T3 Главный минор определителя Гурвица
Так как главный минор определителя Гурвица больше нуля, САУ устойчива. Определение граничного коэффициента передачи разомкнутой цепи b1: =T1+T3 b2: =T1 T3
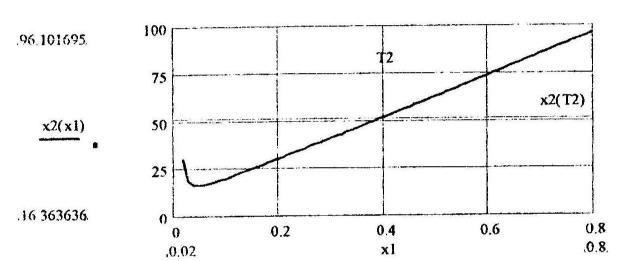
Kgr: =x3(T2) Kgr=155.517 Построение границы устойчивости в плоскости параметров х1 и х2
х1: =0.03, 0.04..0.8 На приведенном графике значения x1=T2 и x2(T2) показаны посредством маркеров (меток), т.е. установлен флажок в соответствующем пункте графического меню. Следует отметить, что в некоторых вариантах контрольной работы возможны два решения для границы x2=¦(x1). Они возможны в случае квадратного уравнения вида P(x1)x32+Q(x1)x3+R(x1)=0, где P(x1), Q(x1), R(x1) коэффициенты этого уравнения, зависящие от варьируемого параметра х1. Если одно решение положительно, а второе – отрицательно, то расчет ведется для границы устойчивости, определенной положительным решением. Если оба решения положительны, то учитывается область устойчивости, ограниченная осями координат и кривой, прилегающей к этим осям, а в качестве граничного значения коэффициента передачи в дальнейших расчетах принимается меньшее из полученных решений.
А) установившаяся составляющая
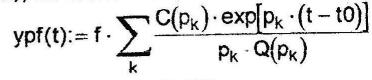
Б) переходная составляющая
Уравнение переходной характеристики по возмущающему воздействию при t = t0 t0: = 0.1
А) установившаяся составляющая
Б) переходная составляющая
В) переходная характеристика
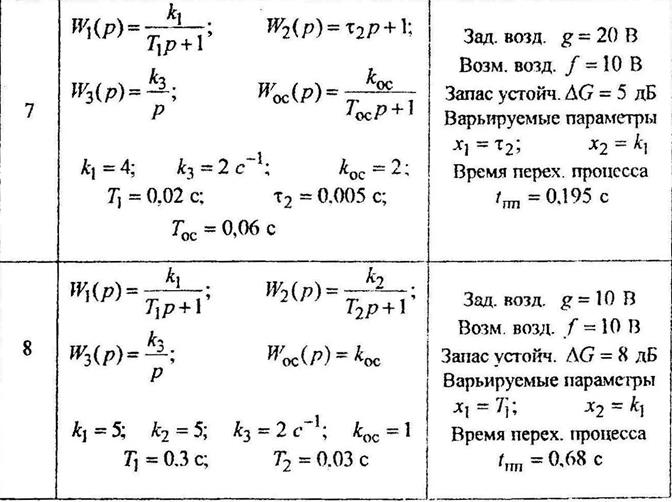
Приложение 1
Исходные данные к курсовой работе
Таблица П1
Продолжение таблицы П1
Продолжение таблицы П1
Продолжение таблицы П1
Продолжение таблицы П1
Продолжение таблицы П1
Продолжение таблицы П1
Продолжение таблицы П1
Введение
Теория автоматического управления (ТАУ) является одной из наиболее важных общетехнических дисциплин, и ее изучение опирается на ряд фундаментальных общеобразовательных и общетехнических дисциплин – математики, информатики, общей электротехники и электроники и т.д. Целью настоящей курсовой работы является самостоятельное закрепление теоретических знаний по непрерывным линейным системам автоматического управления, полученных на лекциях, практических занятиях и лабораторных работах. Курсовая работа предусматривает самостоятельное выполнение синтеза и анализа следящей САУ. Синтез производится с помощью ЛАЧХ и ЛФЧХ. Система интегрированного программирования MathCad является хорошим инструментальным средством для решения задач ТАУ. Основы пользования пакетом изучались в курсе «Спец. Главы информатики». При решении задач по курсу ТАУ необходимо знать и использовать дополнительные возможности пакета, как формирование функций из отрезков прямых линий, определение корней линейных алгебраических уравнений, решение трансцендентных уравнений, нанесение на график логарифмической шкалы, интерполяция и математическая регрессия для данных, представленных в виде векторов. Приобретенные навыки приемов и методов, применяемых при анализе и синтезе систем автоматического управления, будут использованы в изучении дисциплин «Автоматизированный электропривод», «Моделирование систем». Структурная схема исследуемой системы показана на рис.1.
Рис.1.
В курсовой работе необходимо 1. Определить типовые звенья, входящие в структуру САУ. 2. Определить передаточные функции САУ и ее характеристический полином. 3. По критерию устойчивости Гурвица определить устойчивость САУ, рассчитать граничное значение коэффициента передачи разомкнутой цепи и построить область устойчивости САУ относительно варьируемых параметров Х1 и Х2. 4. Построить статические и внешние характеристики для заданной САУ и для САУ, у которой значение параметра Х2 выбрано в соответствии с заданным запасом устойчивости по амплитуде DG. Рассчитать статизм для обоих вариантов САУ и сравнить полученные результаты. 5. Для САУ, у которой значение параметра Х2 выбрано в соответствии с заданным запасом устойчивости по амплитуде DG, рассчитать асимптотическую и точную ЛАЧХ, точную логарифмическую фазовую частотную характеристику (ЛФЧХ) и определить запас устойчивости по фазе Dj. 6. Для замкнутой САУ, у которой значение параметра Х2 выбрано в соответствии с заданным запасом устойчивости по амплитуде DG, рассчитать амплитудную (АЧХ) и вещественную (ВЧХ) частотные характеристики и определить по ним показатели качества регулирования. 7. Для замкнутой САУ, у которой значение параметра Х2 выбрано в соответствии с заданным запасом устойчивости по амплитуде DG, рассчитать переходные характеристики по задающему g и возмущающему ¦ воздействиями, определить по ним показатели качества регулирования и сравнить результаты с ранее полученными. 8. Исходя из заданного времени переходного процесса tпп и перерегулирования d = 25% провести синтез последовательного корректирующего устройства и рассчитать переходную характеристику скорректированной САУ по задающему воздействию. Определить показатели качества регулирования для этой САУ и сравнить их с ранее рассчитанными.
Курсовая работа выполняется в виде расчетного файла с использованием пакета MathCad. Расчеты необходимо снабжать текстовыми комментариями и выводами.
Вариант курсовой работы выдается преподавателем. Исходные данные для вариантов курсовой работы приведены в приложении П1, а пример ее выполнения в разделе 1.
Пример выполнения курсовой работы. 1.1 Исходные данные к схеме приведены на рис.1.
Параметры звеньев и варьируемые параметры приведены в табл.1.
Таблица 1.
Примечание: в табл.1 ¦m – максимальная величина возмущающего воздействия; g – задающее воздействие; DG – запас устойчивости по амплитуде; tпп – время переходного процесса (в секундах).
Популярное:
|
Последнее изменение этой страницы: 2016-05-28; Просмотров: 766; Нарушение авторского права страницы


 В) переходная характеристика
В) переходная характеристика