|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
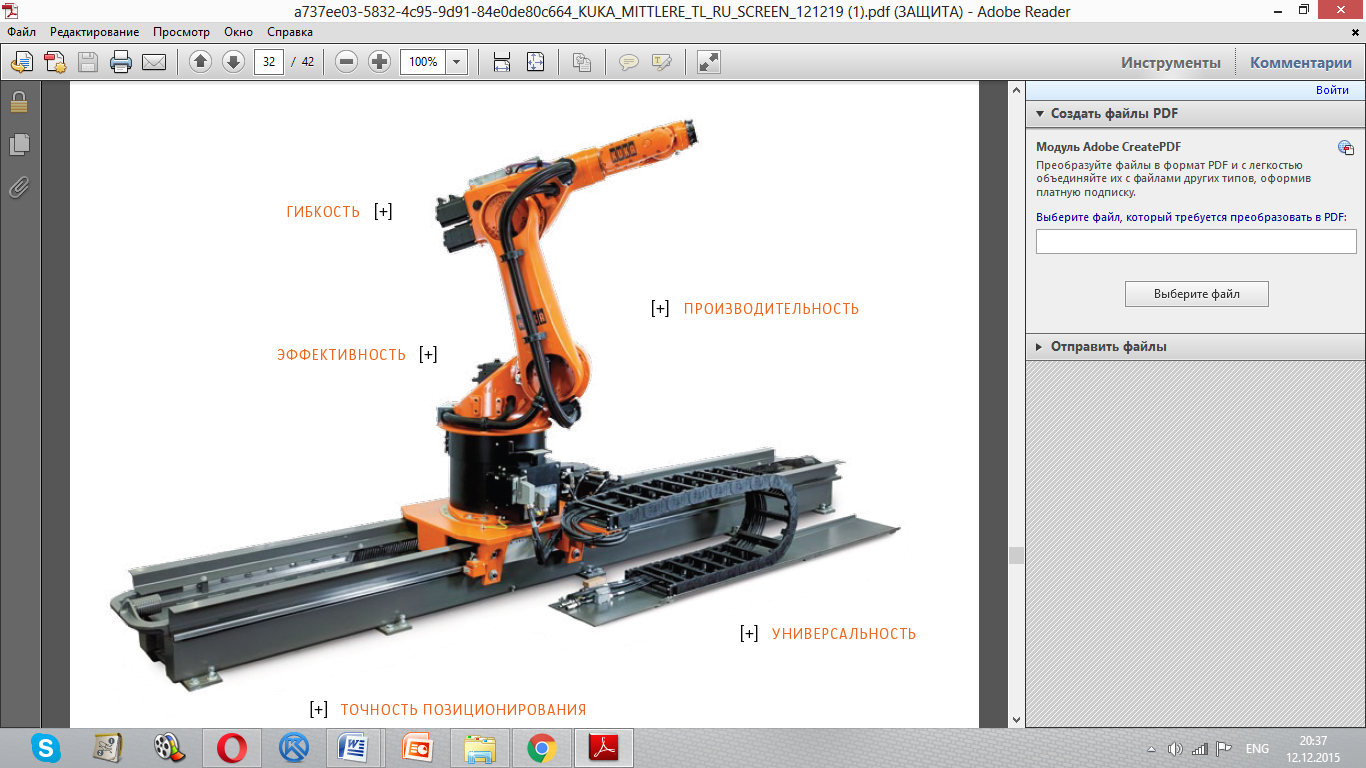
Промышленный робот портального типа модель KR 30 JET
Робот KUKA KR 30 легко настраивается для различных приложений и проектов. Он обладает средней грузоподъемностью и способен выполнять мощные и точные движения. Характеристики и преимущества: Быстро.Очень высокая скорость и ускорение всех осей, например, для быстрого извлечения из машин сверху. Компактность.Портальное исполнение позволяет освободить место в цеху и управлять сверху несколькими машинами, установленными в ряд до 30 метров. Точность позиционирования.Высокоточная механика следит за точностью и воспроизводимостью рабочих процессов во всей рабочей зоне. Глубина.Идеальное решение для работы в станках сверху вниз. Обеспечивает оптимальную интеграцию и дооснащение станков. Гибкость.Расположение робота сбоку или «вниз головой», а также эксплуатация до двух роботов на одной оси JET открывают дополнительные возможности для применения. Разносторонность. Опциональное исполнение для литейного цеха пригодно для работы даже в жестких условиях.
Параметры движения осей
Рисунок 1 – Промышленный робот KR 30 JET
Рисунок 2 – Чертежа модели KR 30 JET
Промышленный робот портального типа модель KL 1000-2 Трек KL 1000-2 предназначен для линейного перемещения промышленного робота вдоль длинномерных деталей, что позволяет увеличить рабочую зону робота. Привод трека реализован как дополнительная ось робота и управляются от контроллера робота. Характеристики и преимущества: Эффективность. Дополнительный высокоскоростной вариант для задач, где требуется быстрота и короткая продолжительность циклов. Гибкость.Возможность перемещения на большое расстояние многократно расширяет диапазон действия роботов. Линейные блоки служат как дополнительная ось, таким образом не требуется дополнительная система управления. Универсальность.Для работы в затрудненных условиях предлагаются напольные и потолочные варианты, а также кожух для защиты от загрязнений. Точность позиционирования.На одной линейной оси можно управлять максимум четырьмя роботами. При этом наличие нескольких точек позиционирования робота на линейной оси обеспечивает оптимальную выверку в соответствии с существующими требованиями и рабочими зонами. Производительность. Перемещение заготовок/инструментов дополнительными каретками с собственным приводом или без него (трендер) обеспечивает сокращение продолжительности тактов.
Рисунок 3 – Промышленный робот KL 1000-2
Популярное:
|
Последнее изменение этой страницы: 2016-05-30; Просмотров: 2284; Нарушение авторского права страницы
 0, 06 мм
0, 06 мм
 до +55
до +55