
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Устройства, принцип работы электродвигателя. ИО электромеханических приводов.Стр 1 из 7Следующая ⇒
Устройства, принцип работы электродвигателя. ИО электромеханических приводов. Важными органами в электромеханических приводах являются: трехфазный двигатель переменного тока, двигатели постоянного тока и шаговые двигатели. Принцип работы электродвигателя основан на физическом эффекте и заключается в следующем: Если на проводник из определенного материала подать электрический ток, то в нем создается магнитное поле.
· B – магнитная индукция; · H – напряженность магнитного поля.
Показателем мощности является максимум
В основе ферромагнитных материалов лежат: Al, B, Co, Cu, Fe, Nd, Sm, V, Zr. Трехфазный электродвигатель переменного тока.
Самым популярным электродвигателем является асинхронный электродвигатель трехфазного тока. Эти двигатели просты в эксплуатации, неприхотливы, обладают сравнительно невысокой стоимостью, имеют простую конструкцию и обладают большей мощностью, чем постоянные двигатели при их одинаковой массе. Конструкция: статор, ротор.
Электродвигатель состоит из корпуса, в котором размещен статор с трехсекционной обмоткой, с соединенными V1-V2, U1-U2, W1-W2, эта обмотка уложена в пазах статора. Обмотка статора подсоединена непосредственно к трехфазной сети переменного тока. Согласно рисунку схема присоединения обмотки называется схемой соединения звездой. Различают также схему соединения треугольником.
Ротор различают 2 основных типов: 1. Ротор с короткозамкнутым кольцом (двигатель – трехфазный асинхронный двигатель с короткозамкнутым ротором); 2. Фазный ротор (ротор с контактными кольцами и щеткой) (двигатель – трехфазный асинхронный двигатель с фазным ротором). Наиболее распространены двигатели с короткозамкнутым ротором. Двигатель с короткозамкнутым ротором. Ротор состоит из: · Вала; · Пакета сердечников с пазами, в которых установлены стержни, которые с двух сторон замкнуты короткозамкнутыми кольцами, изготовленными из Al или Cu.
Наклон расположения стержней необходим для более плавной работы двигателя. Короткозамкнутые кольца: стержни встроенные в пакет сердечников замкнуты с двух сторон короткозамкнутыми кольцами, проходящими через пакет сердечников ротора, и служат для минимализации вихревых токов созданных переменными магнитными полями.
Двигатели с фазным ротором. Ротор двигателя с контактными кольцами (фазный ротор) также состоит из вала с сердечником из листов электротехнической стали; однако в пазы пакета сердечников уложена трехсекционная обмотка смонтированная по схеме звезды, т.е. три конца обмотки выведены вместе и спаяны в одну точку, три других конца через контактные кольца с щетками выведены наружу и присоединены к KLM.
Характеристики двигателя с фазным ротором: 1. M M=f(n) 2. N M=f(S)
Мкр – задается в каталоге двигателя
Однополюсная машина p=2. Скорости вращения м.п. в сети 50 Гц в зависимости от числа полюсов и числа обмоток.
Синхронная скорость в зависимости от числа P
Вращающиий момент у асинхронных двигателей не пропорционален току ротора (i2) и току подводимому к обмотке двигателя (M не пропорционален I). Где: 1. Статор 2. Ротор Это обусловлено тем, питающее напряжение и ток в обмотке зависят от числа оборотов. Система пуска двигателя и управление пуском. Асинхронные двигатели при прямом включении в 3-6 раз больше потребляют электроэнергии чем при номинальной работе. Двигатели мощностью 4 кВт не должны включаться напрямую (поскольку в противном случае высокие переменные токи приведут к высоким колебаниям в сети). Для включения двигателя больше 4 кВт предусмотрена схема включения двигателя со звезды на треугольник. Схема Даландера. В схеме Даландера обмотки статора двухскоростного двигателя секционированы на 6 ветвей или фаз. Для низкой частоты вращения две обмотки функционируют в схеме треугольник, для более высокой частоты ещё две обмотки включены параллельно в схеме двойной звезды. Вращающие моменты в обоих вариантах примерно одинаковы. Мощность при высокой частоте вращения примерно в 2 раза выше, чем при малом числе оборотов.
Трехскоростной вариант. Схема Даландера часто используется с раздельной обмоткой для пониженного числа оборотов. Пуск при этом осуществляется с помощью контактора К1 и обмотки для низкой скорости вращения. Среднее число оборотов достигается при срабатывании К2, причем К1 должен быть отключен. Для высокой частоты вращения предназначены К3 и К4, при этом К1 и К2 отключены. Схема Даландера применяется в основном для шпинделя главного движения в фрезерных станках. Благодаря возможностям переключения чисел оборотов экономится одна ступень механической передачи.
Конструктивное исполнение. Ротор и статор состоит из пакета чистовой стали. Это позволяет минимизировать вихревые токи. Ротор имеет большие полости, что обеспечивает снижение веса и ослабление инерционных моментов. На наружной стороне ротора расположены постоянные магниты из магнитотвердого материала (сплав самария и кобальта). Статор двигателя имеет обычную обмотку трехфазного тока в косых пазах. Принцип действия: Синхронный трехфазный двигатель запускается через импульсный инвертор с трёхфазным током. Соединенный с ротором сильсин-датчик передает моментный угол поворота ротора электронной системе управления магнитным потоком. По средством ПИ-регулятора (пропорционально-интегрального регулятора) чисел оборотов и ПИ-регулятора тока электронная система согласовывает вектор магнитного потока и частоту вращения таким образом, что с повышением управляющего напряжения вектор магнитного потока вращается быстрее.
Характеристические величины (механическая характеристика). Диапазон чисел оборотов ±5000 об/мин. Двигатели могут нагружаться Мн во всех числах диапазона. Для ускорения двигателя на короткое время обеспечивается 3х-5ти кратная перегрузка в импульсном режиме (можно нагружать моментом М= 3-5 Мн.
В обмотке статора размещен терморезистор предназначенный для контроля нагрева двигателя. По степени защиты двигатель соответствует ряду защиты IP65. 6- защита от пыли 5-защита от брызг воды IP- International Protektion Данные двигатели рассчитаны как высоковольтные с рабочей U=600 В (малое сечение проводов). Приводы постоянного тока. Двигатели постоянного тока имеют в статоре либо электромагнитную обмотку, генерирующую магнитный поток от одного полюсного наконечника к другому, либо наконечники из 2х постоянных магнитов. Ротор двигателя несет в себе обмотку, уложенную в пазы, концы которой присоединены к трансформатору тока. Расположение обмотки в пазах выполнены таким образом, что независимо от положения ротора возникает всегда одинаковый вращающий момент.
В зависимости от рода возбуждения тока различают: 1)двигатель с параллельным возбуждением- шунтовой 2)двигатель с независимым возбуждением (с внешним возбуждением0 3)двигатель с возбуждением от постоянных магнитов 4)двигатель с последовательным возбуждением.
Двигатель постоянного тока с последовательным возбуждением обладает особенно высоким начальным пусковым моментом, поэтому его часто используют как «электрическое устройство запуска механизма» (например, как стартер в автомобиле). Для сервоприводов постоянного тока с широким диапазоном регулирования чисел оборотов обычно выбирают двигатели 2) или 3). В обоих случаях магнитный поток постоянный, а регулирование чисел оборотов осуществляется путем регулирования напряжения ротора Uм.
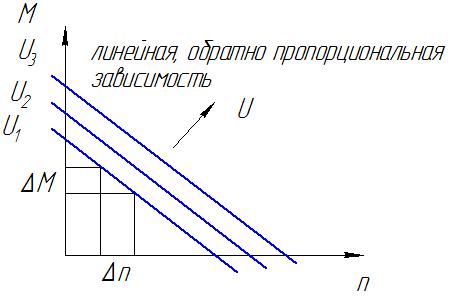
Линейная механическая характеристика гарантирует отличное качество регулирования и управления. I ~ M Диапазон изменения частот вращения путём изменения направления составляет примерно 1: 100. Для изменения направления вращения двигателя достаточно изменить направление тока в обмотке ротора и статора. Для двигателей постоянного тока кроме механической характеристики важна динамическая характеристика, описывающая изменение чисел оборотов при скачкообразном изменении напряжения.
При скачкообразном изменении напряжения число оборотов двигателя изменяется в соответствии с экспоненциальной функцией.
Важным параметром динамической характеристики является механическая постоянная времени Тм, которая тем меньше, чем меньше момент инерции механизма и чем круче изгиб кривой
При достижении времени t= Tm двигатель достигает примерно 64% своей конечной частоты вращения. Для двигателей характерен следующий диапазон механической постоянной времени, равной от 4 до 40 мс. Tm= 4…40 мс при N=2 кВт Под действием инерционного момента механическая постоянная резко возрастает у двигателя с дисковым или гибким ротором и значительно меньше у двигателя с большим пусковым моментом. У двигателей с наиболее низким Tm- малые маховые массы и особенно высокое быстродействие (серводвигатели). Регулирование чисел оборотов и направление вращения у двигателей постоянного тока осуществляется путем изменения напряжения статора с помощью управляемого источника постоянного напряжения, такие источники создаются на основе тиристоров или транзисторов.
Различают 3 схемы управления: 1)одно квадратный режим 2)двух квадратный режим 3)четырех квадратный режим
Большие приводы с часто повторяющимися процессами пуска, торможения и реверсирования чаще всего конструируются в виде четырех квадратных механизмов. Шаговые двигатели. Двигатели постоянного тока (ДПТ) с постоянными магнитами начинают работать сразу, как только к якорной обмотке будет приложено постоянное напряжение. Переключение направления тока через обмотки ротора осуществляется механическим коммутатором — коллектором. Постоянные магниты при этом расположены на статоре.
Шаговый двигатель (ШД) может быть рассмотрен как ДПТ без коллекторного узла. Обмотки ШД являются частью статора. На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала. Все коммутации производятся внешними схемами. Обычно система мотор — контроллер разрабатывается так, чтобы была возможность вывода ротора в любую, фиксированную позицию, то есть система управляется по положению. Цикличность позиционирования ротора зависит от его геометрии. Принято различать шаговые двигатели и серводвигатели. Принцип их действия во многом похож, и многие контроллеры могут работать с обоими типами. Основное отличие заключается в шаговом (дискретном) режиме работы шагового двигателя (n шагов на один оборот ротора) и плавности вращения синхронного двигателя. Серводвигатели требуют наличия в системе управления датчика обратной связи по скорости и/или положению, в качестве которого обычно используется резольвер или sin/cos энкодер. Шаговые двигатели преимущественно используются в системах без обратных связей, требующих небольших ускорений при движении. В то время как синхронные сервомоторы обычно используются в скоростных высокодинамичных системах.
Шаговые двигатели (ШД) делятся на две разновидности: двигатели с постоянными магнитами и двигатели с переменным магнитным сопротивлением (гибридные двигатели). С точки зрения контроллера отличие между ними отсутствует. Двигатели с постоянными магнитами обычно имеют две независимые обмотки, у которых может присутствовать или отсутствовать срединный отвод (см. рис. 1).
Биполярные шаговые двигатели с постоянными магнитами и гибридные двигатели сконструированы более просто, чем униполярные двигатели, обмотки в них не имеют центрального отвода (см. рис. 2).
За это упрощение приходится платить более сложным реверсированием полярности каждой пары полюсов мотора.
Шаговые двигатели имеют широкий диапазон угловых разрешений. Более грубые моторы обычно вращаются на 90° за шаг, в то время как прецизионные двигатели могут иметь разрешение 1, 8° или 0, 72° на шаг. Если контроллер позволяет, то возможно использование полушагового режима или режима с более мелким дроблением шага (микрошаговый режим), при этом на обмотки подаются дробные значения напряжений, зачастую формируемые при помощи ШИМ-модуляции. Если в процессе управления используется возбуждение только одной обмотки в любой момент времени, то ротор будет поворачиваться на фиксированный угол, который будет удерживаться пока внешний момент не превысит момента удержания двигателя в точке равновесия. Для правильного управления биполярным шаговым двигателем необходима электрическая схема, которая должна выполнять функции старта, стопа, реверса и изменения скорости. Шаговый двигатель транслирует последовательность цифровых переключений в движение. «Вращающееся» магнитное поле обеспечивается соответствующими переключениями напряжений на обмотках. Вслед за этим полем будет вращаться ротор, соединенный посредством редуктора с выходным валом двигателя. Каждая серия содержит высокопроизводительные компоненты, отвечающие все возрастающим требованиям к характеристикам современных электронных применений.
Схема управления для биполярного шагового двигателя требует наличия мостовой схемы для каждой обмотки. Эта схема позволит независимо менять полярность напряжения на каждой обмотке. На рисунке 3 показана последовательность управления для режима с единичным шагом.
На рисунке 4 показана последовательность для полушагового управления.
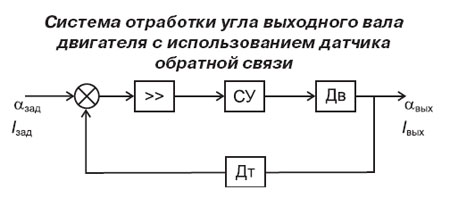
Максимальная скорость движения определяется исходя из физических возможностей шагового двигателя. При этом скорость регулируется путем изменения размера шага. Более крупные шаги соответствуют большей скорости движения. В системах управления электроприводами для отработки заданного угла или перемещения используют датчики обратной связи по углу или положению выходного вала исполнительного двигателя. Если в качестве исполнительного двигателя использовать синхронный шаговый двигатель, то можно обойтись без датчика обратной связи (Дт) и упростить систему управления двигателем (СУ), так как отпадает необходимость использования в ней цифро-аналоговых (ЦАП) и аналого-цифровых (АЦП) преобразователей.
Шаговыми двигателями называются синхронные двигатели, преобразующие команду, заданную в виде импульсов, в фиксированный угол поворота двигателя или в фиксированное положение подвижной части двигателя без датчиков обратной связи. Мощность шаговых двигателей лежит в диапазоне от единиц ватт до одного киловатта. Шаговый двигатель имеет не менее двух положений устойчивого равновесия ротора в пределах одного оборота. Напряжение питания обмоток управления шагового двигателя представляет собой последовательность однополярных или двуполярных прямоугольных импульсов, поступающих от электронного коммутатора (К). Результирующий угол соответствует числу переключений коммутатора, а частота вращения двигателя соответствует частоте переключений электронного коммутатора. Шаговые двигатели различаются по конструктивным группам: активного типа (с постоянными магнитами), реактивного типа и индукторные.
Линейный привод. Линейный привод - это комплекс устройств, предназначенных для поступательного линейного перемещения исполнительных органов рабочих систем. -линейный пневмоэлектропривод (использует энергию сжатого воздуха), Для преобразования энергии в механическую в электроприводах используются различные типы электродвигателей, в зависимости от потребностей производства- переменного или постоянного тока. Асинхронные однофазный двигатели переменного тока имеют мощность менее 0, 5 кВт, трехфазные - большую мощность и способны обеспечить более быстрое перемещение. Также при необходимости могут быть использованы двигатели постоянного тока или серводвигатели. У линейного электропривода много достоинств, перед своими конкурентами, он гораздо дешевле в эксплуатации, и работает при любых погодных условиях (в отличии от гидропривода), не требует дополнительного оборудования для эксплуатации (в отличии от пневматики). Линейные приводы производства компании " Сервомеханизмы", можно разделить на 2 группы, в зависимости от принципа крепления двигателя: - двигатель вращает винт винтовой передачи привода через червячный редуктор. Ось двигателя перпендикулярна оси механизма привода. - двигатель вращает винт передачи через зубчато-ременный редуктор. Ось двигателя параллельна оси механизма привода. Обе группы изготавливаются в двух исполнениях: -винтовая передача взаимодействует между собой по 1- и 2-х заходной трапециидальной резьбе.(винтовая пара)
Механизм электропривода, как уже было сказано, комплектуется асинхронными 1 и 3 фазными электродвигателями, двигателями постоянного тока от 12 до 220В, так же более сложными устройствами - серводвигателями. Применение: 1)Технологическое оборудование для фотолитографии. 2)Оборудование для контроля качества - OLED, LCD дисплеев - солнечных элементов - фотомасок - микроэлектронных устройств 3)Привод сверхточных станков 4)Предметный стол микроскопов Выбор ЭД. При выборе двигателя учитывают 3 основных фактора:
Расчет мощности двигателя. 1. При постоянной нагрузке. 1.Определяется Мc, Fc, P. 2.По каталогу выбирается двигатель, номинальная мощность которого больше мощности механизма Рн ≥ Рпривед. к валу дв-ля или Мн ≥ Мс. 3.Проверка пуска двигателя Мn ≥ Мн*ƞ n. 2. При переменной нагрузке двигатель рассчитывают по методу средних потерь или по методу эквивалентных величин. 1.Нагрузочная диаграмма Мс, Fс, Pпривед. к валу дв-ля.
2.Определение эквивалентных величин по Iэ, Мэ, Рэ. Δ P~I2 I2~M~P Эквивалентный ток- это ток, неизменный во времени, но составляющий такие же потери мощности Δ Р в двигателе, как и протекающий реальный ток, изменяющийся во времени.
3.Выбор двигателя по каталогу, Мн ≥ Мэ, Рн ≥ Рэ. 4.Проверка двигателя по перегрузочной способности.
3. Расчет мощности двигателя для повторно-кратковременного режима работы. 1.строится нагр.диаграмма Мc, Fc, P. 2.Определяется Рср . 3.Выбираем двигатель Рн ≥ Рср . 4.Определяем Мэ, Рэ . 5. Мэ, Рэ пересчитывают для ближайшего стандартного значения ПВнаминальное .
6.По каталогу выбираем двигатель с Рн и ПВнаминальное : Рн ≥ Рс . 7.Проверка двигателя по перегрузочной способности.
Пневматические привода. Пневматика подразумевает техническое применение сжатого воздуха. При этом чаще всего используется избыточное давление. В некоторых случаях возможно применение вакуума. Область применения пневматических приводов: 1. Ротационные двигатели (пневматические двигатели). Пневмоприводы для привинчивания, сверления, шлифования. 2. Линейные приводы (пневматический цилиндр). Для загрузки, перемещения, зажима… 3. Ударные приводы. Для заклёпки, штамповки, прессования… 4. Сопло для продувки изделия, выдувания стружки. 5. Пескоструйная очистка поверхностей. Пульверизационная окраска. 6. Контрольно- измерительные приборы.
Общие технические характеристики пневматических установок (ПУ).
Факторы определяющие ограничения применения пневматических приводов.
Конструктивное исполнение в ПУ.
Генерация сжатого воздуха: в нем происходит всасывание воздуха из атмосферы → фильтрация→ сжатие. Нагретый в процессе сжатия воздух подлежит охлаждению в охлаждителе. Выделяющийся конденсат отводится через конденсатоотводчик. Охлажденный и сжатый до требуемого давления воздух отводится в ресивер.
Система подготовки сжатого воздуха: перед тем как сжатый воздух попадет в пневмоцилиндр, осуществляется его фильтрация, устанавливается постоянное рабочее давление и производится насыщение масляным туманом.
Условные изображения пневмоустройств регламентированы международным стандартом ДИН ИСО 1219.
Компрессоры. Генерация сжатого воздуха происходит в компрессорах (поршневые и турбокомпрессоры). Поршневые подразделяются на компрессоры с подъемным поршнем и слово, и мембранные компрессоры. Различают с поворотным поршнем, которые подразделяются на компрессоры с одним валом ( многосекторный, роторный) и с двумя валами ( винтовой, роторный компрессор, компрессор с поворотными зубцами и роторно-щелевой. Турбо: осевые и радиальные. Поршневые компрессоры функционируют по принципу вытеснения: воздух всасывается, запирается в емкостях, сжимается поршнем и вытесняется в ресивер. Рабочее давление поршневого компрессора до 10 бар, производительность: 100 мᶾ /час. Мембранный компрессор: сжимает воздух с помощью герметично-фиксированной мембраны. Они не нуждаются в уходе. Работают практически бесшумно и начиная от рабочего давления 10 бар имеют 2 ступени исполнения (с охлаждением). Винтовые и многосекторные компрессоры способны выдерживать нагрузку в длительном режиме. Турбокомпрессоры всасывают атмосферный воздух по средством рабочих колес и ускоряют его. Далее энергия воздушного давления преобразуется в энергию давления.
Управление компрессорами. Для малых и средних компрессоров- двухпозиционное регулирование. При достижении максимального давления движение останавливается. После снижения давления на 0, 2-0, 4 бар двигатель компрессора вновь начинает работать. Такая периодичность включения составляет 20 раз в 1 минуту. Компрессоры больших габаритов работают в режиме холостого хода (по причине больших значений инерционных моментов). При достижении конечного давления сжатия двигатель не останавливается, а работает в режиме холостого хода, при этом либо перекрывается линия всасывания воздуха из атмосферы, либо открывается клапан избыточного давления, но двигатель всегда работает. В процессе сжатия воздуха в компрессорных установках происходит 2 процесса: регенерация тепла и выделение конденсата. В линиях подготовки сжатого воздуха встраиваются осушители. В металлорежущих станках используется осушение воздуха 3-ей ступени качества.
Основными критериями являются: - производительность подачи сжатого воздуха - сопротивление движению воздушного потока - длина трубопроводной сети - рабочее давление - падение рабочего давления
Подготовка сжатого воздуха.
Агрегат подготовки сжатого воздуха состоит из фильтра, регулятора давления и масленки.
Приводные элементы ПУ.
Пневмоприводы преобразуют пневматическую энергию давления в энергию движения. Известны приводы вращательного действия, пневмодвигатели, приводы поворота (вращающиеся пневмоцилиндры) и приводы прямолинейного движения. Условные обозначения стандартизированы.
Гидроприводы. Гидравлика как технология регулирования и управления на основе рабочей жидкости (масла) находит применение, прежде всего в тяжелом машиностроении (гидравлические установки кранов, домкратов, экскаваторов, прессов), а также в станкостроении. Основные свойства гидравлики: - высокая удельная мощность при компактном конструктивном исполнении - быстрое, чувствительное и бесступенчатое регулируемое движение - возможность передачи больших усилий - высокая защита от перегрузок за счет ограничения давления
Передача движения осуществляется: 1. Посредством покоящейся жидкости (гидростатика) 2. Посредством текущей жидкости (гидродинамика)
1бар= 10 Н/см2 Жидкость может течь по трубе только при наличии разности давления. В замкнутой системе объемный расход остается постоянным.
При Q=const в местах разной площади сечения скорость будет изменяться. Чем меньше S, тем выше Ʋ. При уменьшении поперечного сечения скорость течения возрастает. Под действием сил трения и ускорения среды давление в узких местах падает. Согласно закону Бернулли сумма статического и динамического давлений остается постоянной. ½ *ρ *Ʋ +р=const – уравнение Бернулли, ρ -плотность жидкости В местах сужения температура возрастает. Различают ламинарное и турбулентное течение жидкости.
Турбулентность возникает при увеличении скорости течения жидкости. Критерием турбулентности является число Рейнольдса Re.
В гидравлике применяют минеральные масла, которые подразделяются на 3 основные группы: 1. HL- минеральные масла с содержанием присадок для повышения сопротивления старению и улучшение защиты от коррозии. Используются при высоких температурах. 2. HV- при значительных колебаниях температуры. 3. HF- трудновоспламеняемые масла. Вязкость - внутреннее трение в жидкости. С увеличение температуры кинематическая вязкость уменьшается. От вязкости зависит КПД гидравлической установки. Устройства, принцип работы электродвигателя. ИО электромеханических приводов. Важными органами в электромеханических приводах являются: трехфазный двигатель переменного тока, двигатели постоянного тока и шаговые двигатели. Принцип работы электродвигателя основан на физическом эффекте и заключается в следующем: Если на проводник из определенного материала подать электрический ток, то в нем создается магнитное поле.
· B – магнитная индукция; · H – напряженность магнитного поля.
Показателем мощности является максимум
В основе ферромагнитных материалов лежат: Al, B, Co, Cu, Fe, Nd, Sm, V, Zr. Популярное:
|
Последнее изменение этой страницы: 2016-06-04; Просмотров: 1127; Нарушение авторского права страницы
 Ферромагнетик характеризуется:
Ферромагнетик характеризуется: 
 . Чем выше B, тем сильнее притяжение (магнит). Чем выше H, тем ниже опасность ослабления магнитного поля и размагничивания элемента.
. Чем выше B, тем сильнее притяжение (магнит). Чем выше H, тем ниже опасность ослабления магнитного поля и размагничивания элемента.








 - скольжение
- скольжение – номинальное скольжение
– номинальное скольжение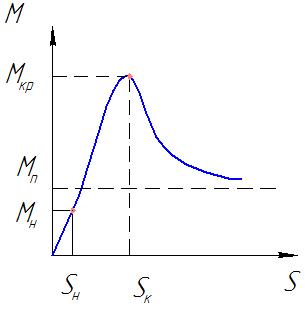











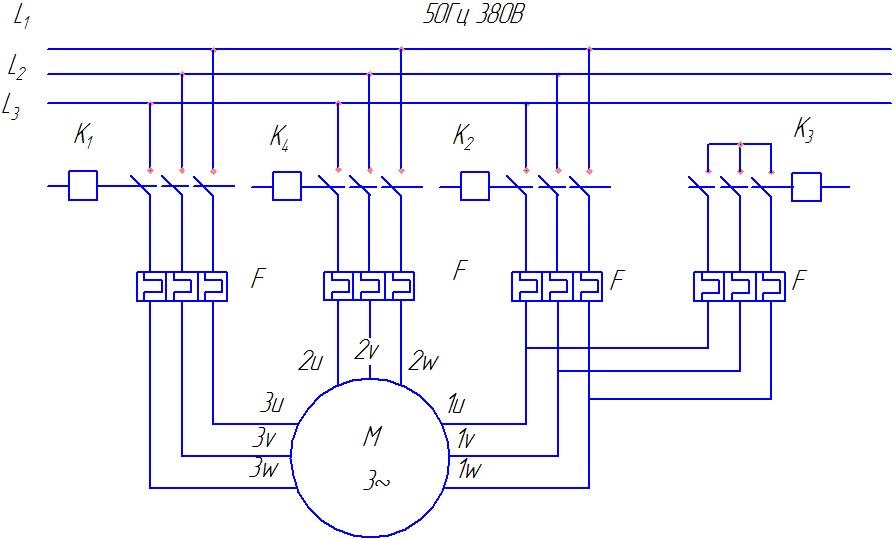 Пуск осуществляется с помощью К1 и обмотки для низкой скорости вращения (N3). Среднее число оборотов достигается в результате срабатывания К2. При этом К1 отключается. Для высоких скоростей вращения предназначены К3 и К4, при этом К1 и К2 отключаются.
Пуск осуществляется с помощью К1 и обмотки для низкой скорости вращения (N3). Среднее число оборотов достигается в результате срабатывания К2. При этом К1 отключается. Для высоких скоростей вращения предназначены К3 и К4, при этом К1 и К2 отключаются.





 ;
; 




















 Передача сжатого воздуха потребителю осуществляется по трубопроводной сети, используются стальные, медные и ПВХ трубы. Главные распределительные трубопроводы укладываются в виде кольца. Выбор диаметра трубопровода главной распределительной линии осуществляется по специальной номограмме.
Передача сжатого воздуха потребителю осуществляется по трубопроводной сети, используются стальные, медные и ПВХ трубы. Главные распределительные трубопроводы укладываются в виде кольца. Выбор диаметра трубопровода главной распределительной линии осуществляется по специальной номограмме.













 F=p*S
F=p*S ,
,  ,
, 



