|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Характеристические величины.
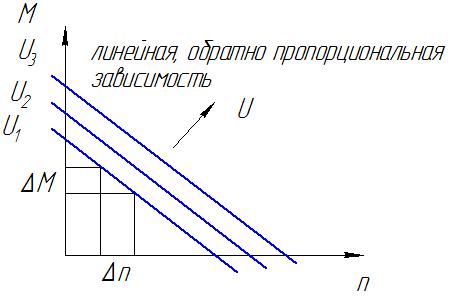
Асинхронный двигатель 3х фазного тока с эл-ым переключением в нижнем диапазоне чисел оборотов создает постоянный вращающий момент и создаёт линейно возрастающую мощность в зависимости от чисел оборотов. В более высоком диапазоне частот вращающий момент обратоно пропорционален V вращения. В этой области создаётся область постоянной мощности. В результате ослебления магнитного поля возможно получение V до 20000 об/мин.
Более компактную конструкцию и более высокую мощность имеют 3х фазные асинхронные двигатели с внутренним водным охлаждением. Комплектный привод (многодвигательный электропривод). В области металлообработки используется станочное оборудование с ЧПУ и оснащенное сразу несколькими 3х фазными двигателями с регулируемыми числами оборотов. Например в токарном станке с ЧПУ имеется один 3х фазный асинхронный двигатель для привода главного движения и 2 синхронных двигателя для приводов подачи.
В этом случае все 3 электродвигателя для импульсных инверторов требуют постоянного напряжения для чего используется промежуточная цепь постоянного тока с блоками ввода-вывода питания для всех 3х двигателей. Через систему с шинной организацией можно регулировать и контролировать все 3 импульсных инвертора, 3 контура регулирования чисел оборотов и 3 контура тока. При этом приборная шина и соответствующие блоки имеют каскадную организацию, т.е. модули и блоки подключаются друг к другу. Приводы постоянного тока. Двигатели постоянного тока имеют в статоре либо электромагнитную обмотку, генерирующую магнитный поток от одного полюсного наконечника к другому, либо наконечники из 2х постоянных магнитов. Ротор двигателя несет в себе обмотку, уложенную в пазы, концы которой присоединены к трансформатору тока. Расположение обмотки в пазах выполнены таким образом, что независимо от положения ротора возникает всегда одинаковый вращающий момент.
В зависимости от рода возбуждения тока различают: 1)двигатель с параллельным возбуждением- шунтовой 2)двигатель с независимым возбуждением (с внешним возбуждением0 3)двигатель с возбуждением от постоянных магнитов 4)двигатель с последовательным возбуждением.
Двигатель постоянного тока с последовательным возбуждением обладает особенно высоким начальным пусковым моментом, поэтому его часто используют как «электрическое устройство запуска механизма» (например, как стартер в автомобиле). Для сервоприводов постоянного тока с широким диапазоном регулирования чисел оборотов обычно выбирают двигатели 2) или 3). В обоих случаях магнитный поток постоянный, а регулирование чисел оборотов осуществляется путем регулирования напряжения ротора Uм.
Линейная механическая характеристика гарантирует отличное качество регулирования и управления. I ~ M Диапазон изменения частот вращения путём изменения направления составляет примерно 1: 100. Для изменения направления вращения двигателя достаточно изменить направление тока в обмотке ротора и статора. Для двигателей постоянного тока кроме механической характеристики важна динамическая характеристика, описывающая изменение чисел оборотов при скачкообразном изменении напряжения.
При скачкообразном изменении напряжения число оборотов двигателя изменяется в соответствии с экспоненциальной функцией.
Важным параметром динамической характеристики является механическая постоянная времени Тм, которая тем меньше, чем меньше момент инерции механизма и чем круче изгиб кривой
При достижении времени t= Tm двигатель достигает примерно 64% своей конечной частоты вращения. Для двигателей характерен следующий диапазон механической постоянной времени, равной от 4 до 40 мс. Tm= 4…40 мс при N=2 кВт Под действием инерционного момента механическая постоянная резко возрастает у двигателя с дисковым или гибким ротором и значительно меньше у двигателя с большим пусковым моментом. У двигателей с наиболее низким Tm- малые маховые массы и особенно высокое быстродействие (серводвигатели). Регулирование чисел оборотов и направление вращения у двигателей постоянного тока осуществляется путем изменения напряжения статора с помощью управляемого источника постоянного напряжения, такие источники создаются на основе тиристоров или транзисторов.
Различают 3 схемы управления: 1)одно квадратный режим 2)двух квадратный режим 3)четырех квадратный режим
Большие приводы с часто повторяющимися процессами пуска, торможения и реверсирования чаще всего конструируются в виде четырех квадратных механизмов. Шаговые двигатели. Двигатели постоянного тока (ДПТ) с постоянными магнитами начинают работать сразу, как только к якорной обмотке будет приложено постоянное напряжение. Переключение направления тока через обмотки ротора осуществляется механическим коммутатором — коллектором. Постоянные магниты при этом расположены на статоре.
Шаговый двигатель (ШД) может быть рассмотрен как ДПТ без коллекторного узла. Обмотки ШД являются частью статора. На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала. Все коммутации производятся внешними схемами. Обычно система мотор — контроллер разрабатывается так, чтобы была возможность вывода ротора в любую, фиксированную позицию, то есть система управляется по положению. Цикличность позиционирования ротора зависит от его геометрии. Принято различать шаговые двигатели и серводвигатели. Принцип их действия во многом похож, и многие контроллеры могут работать с обоими типами. Основное отличие заключается в шаговом (дискретном) режиме работы шагового двигателя (n шагов на один оборот ротора) и плавности вращения синхронного двигателя. Серводвигатели требуют наличия в системе управления датчика обратной связи по скорости и/или положению, в качестве которого обычно используется резольвер или sin/cos энкодер. Шаговые двигатели преимущественно используются в системах без обратных связей, требующих небольших ускорений при движении. В то время как синхронные сервомоторы обычно используются в скоростных высокодинамичных системах.
Шаговые двигатели (ШД) делятся на две разновидности: двигатели с постоянными магнитами и двигатели с переменным магнитным сопротивлением (гибридные двигатели). С точки зрения контроллера отличие между ними отсутствует. Двигатели с постоянными магнитами обычно имеют две независимые обмотки, у которых может присутствовать или отсутствовать срединный отвод (см. рис. 1).
Биполярные шаговые двигатели с постоянными магнитами и гибридные двигатели сконструированы более просто, чем униполярные двигатели, обмотки в них не имеют центрального отвода (см. рис. 2).
За это упрощение приходится платить более сложным реверсированием полярности каждой пары полюсов мотора.
Шаговые двигатели имеют широкий диапазон угловых разрешений. Более грубые моторы обычно вращаются на 90° за шаг, в то время как прецизионные двигатели могут иметь разрешение 1, 8° или 0, 72° на шаг. Если контроллер позволяет, то возможно использование полушагового режима или режима с более мелким дроблением шага (микрошаговый режим), при этом на обмотки подаются дробные значения напряжений, зачастую формируемые при помощи ШИМ-модуляции. Если в процессе управления используется возбуждение только одной обмотки в любой момент времени, то ротор будет поворачиваться на фиксированный угол, который будет удерживаться пока внешний момент не превысит момента удержания двигателя в точке равновесия. Для правильного управления биполярным шаговым двигателем необходима электрическая схема, которая должна выполнять функции старта, стопа, реверса и изменения скорости. Шаговый двигатель транслирует последовательность цифровых переключений в движение. «Вращающееся» магнитное поле обеспечивается соответствующими переключениями напряжений на обмотках. Вслед за этим полем будет вращаться ротор, соединенный посредством редуктора с выходным валом двигателя. Каждая серия содержит высокопроизводительные компоненты, отвечающие все возрастающим требованиям к характеристикам современных электронных применений.
Схема управления для биполярного шагового двигателя требует наличия мостовой схемы для каждой обмотки. Эта схема позволит независимо менять полярность напряжения на каждой обмотке. На рисунке 3 показана последовательность управления для режима с единичным шагом.
На рисунке 4 показана последовательность для полушагового управления.
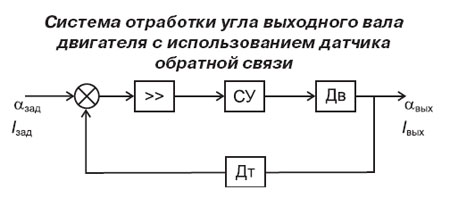
Максимальная скорость движения определяется исходя из физических возможностей шагового двигателя. При этом скорость регулируется путем изменения размера шага. Более крупные шаги соответствуют большей скорости движения. В системах управления электроприводами для отработки заданного угла или перемещения используют датчики обратной связи по углу или положению выходного вала исполнительного двигателя. Если в качестве исполнительного двигателя использовать синхронный шаговый двигатель, то можно обойтись без датчика обратной связи (Дт) и упростить систему управления двигателем (СУ), так как отпадает необходимость использования в ней цифро-аналоговых (ЦАП) и аналого-цифровых (АЦП) преобразователей.
Шаговыми двигателями называются синхронные двигатели, преобразующие команду, заданную в виде импульсов, в фиксированный угол поворота двигателя или в фиксированное положение подвижной части двигателя без датчиков обратной связи. Мощность шаговых двигателей лежит в диапазоне от единиц ватт до одного киловатта. Шаговый двигатель имеет не менее двух положений устойчивого равновесия ротора в пределах одного оборота. Напряжение питания обмоток управления шагового двигателя представляет собой последовательность однополярных или двуполярных прямоугольных импульсов, поступающих от электронного коммутатора (К). Результирующий угол соответствует числу переключений коммутатора, а частота вращения двигателя соответствует частоте переключений электронного коммутатора. Шаговые двигатели различаются по конструктивным группам: активного типа (с постоянными магнитами), реактивного типа и индукторные.
Популярное:
|
Последнее изменение этой страницы: 2016-06-04; Просмотров: 597; Нарушение авторского права страницы






 ;
;