
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Состав ПА. Средства ввода - вывода
Общая характеристика Средства ввода -преобразуют электрические сигналы датчиков в цифровые (информационные) сигналы для использования в средствах программного управления; Средства вывода -преобразуют цифровые (информационные) управляющие сигналы в электрические сигналы управления исполнительными устройствами;
Средства ввода – вывода (в/в) могут быть: · удаленными (автономными, отдельными) с глубиной преобразования до/от информационного сигнала и соединяемыми с СПУ каналом связи, · модульными - информационно объединяемыми с СПУ через специальную коммутирующую панель (корзину) с разъемными соединителями, · встроенными – исполняемыми с СПУ в едином корпусе. В каждой системе обычно используется по нескольку единиц различных средств в/в (например, несколько модулей в корзинах с СПУ и несколько удаленных модулей в/в). Общей характеристикой средств в/в является число каналов, которое меняется для отдельных видов средств в/в от единицы до нескольких десятков. Существует несколько уровней и способов опроса множества каналов ввода. Каждое современное средство ввода имеет свой собственный микроконтроллер, выполняющий циклический опрос всех своих каналов и размещение полученных данных в буфер. Неиспользуемые каналы можно замаскировать (т.е. исключить их из процедуры опроса), что увеличивает быстродействие системы. При поступлении в средство ввода команды считывания, собранные данные передаются из его буфера в определенную область ОЗУ СПУ. Опрос модулей ввода центральным процессором СПУ может выполняться циклически с одинаковой или различной для каждого модуля частотой. Второй вариант позволяет уменьшить загруженность шины обмена данными модулей ввода с СПУ, сгруппировав датчики медленно меняющихся значений физических величин по соответствующим модулям. В подобных случаях более эффективны многомастерные шины (например, CAN или Profibus), которые позволяют использовать режим подписки, при котором контроллер модуля ввода, в котором произошло изменение состояния входа, является инициатором обмена данными. Однако из-за простоты и сравнительно низкой стоимости наибольшее распространение в ПА получили одномастерные шины и циклический опрос (поллинг - от polling) средств ввода. Если требуется выполнить одновременный опрос всех входов системы или вывести данные одновременно через все каналы вывода, то этого используются широковещательные команды, воспринимаемые и исполняемые всеми каналами в/в одновременно. После этого обычным циклическим опросом данные по очереди вводятся в СПУ. Информационные шины, соединяющие средства ввода с СПУ могут быть последовательными или параллельными. В магистрально-модульных системах используются параллельные шины ISA, PCI, Compact PCI, PCI Express, PC/104, SpeedBus, VME и др., в модульных контроллерах – оба вида частнофирменных (нестандартных) шин. В контроллерах с распределенными (удаленными) модулями в/в наиболее распространены последовательные шины на основе интерфейсов RS-485 и CAN. Преимуществом параллельной шины является высокая пропускная способность. Однако небольшая длина параллельной шины, ограниченная рассинхронизацией отдельных бит в передаваемом слове, не позволяет подключить к одному СПУ более 32 модулей. Контроллеры с последовательной шиной имеют противоположные свойства и позволяют создавать большеразмерные распределенные системы сбора данных и управления. Обмен данными со средствами в/в выполняется по адресам, обычно записываемым в ПЗУ этого средства. Иногда адресом является номер слота с модулем или положение соответствующего микропереключателя. Средства в/в имеют гальваническую изоляцию между входными /выходными зажимами и шиной контроллера. Напряжение изоляции составляет от 2500 (реже от 500) до 4000 В. Изоляция может быть поканальная, когда каждый канал изолирован от остальных, или групповая. Обычно используется групповая изоляция. В удаленных модулях может быть использована индивидуальная гальваническая изоляция интерфейса RS-485 каждого модуля или групповая изоляция интерфейсов нескольких модулей с помощью одного модуля развязывающего повторителя интерфейсов. Для передачи напряжения питания в изолированную часть модуля используются DC-DC преобразователи с развязывающими миниатюрными трансформаторами. Современные средства в/в выполняют целый ряд вспомогательных информационных функций включая некоторые виды обработки вводимой информации, компенсацию температуры холодного спая термопар, линеаризацию нелинейных характеристик датчиков, диагностику обрыва датчика, автоматическую калибровку, ПИД- регулирование, ШИМ, управление движением. Перенос части функций СПУ в средства в/в является современной тенденцией, направленной на увеличение степени распараллеливания задач управления, обеспечение независимости локальных модулей (которые по объему своих функций приближаются к СПУ) и уменьшение потока информации между параллельно работающими процессорами в средствах в/в. Ввод аналоговых сигналов Преобразование аналогового сигнала по существу является его измерением и выполняется единственным для каждого средства ввода (например, модуля) электронной схемой аналого - цифрового преобразования (АЦП), последовательно подключаемой электронным коммутатором к этим каналам. На преобразование затрачивается определенное время. Минимальный период времени подачи в СПУ значения каждого канала составляет продолжительность преобразования всех каналов ввода этого средства. Поэтому измерительные каналы всегда имеют ограниченную пропускную способность, а измеренные значения поступают в СПУ в дискретные моменты времени. Разнообразие физических явлений порождает разнообразие датчиков. Для унификации (сокращения числа типов) средств ввода используют встроенные или отдельные средства нормирования выходных электрических сигналов датчиков в соответствие с ГОСТ 26.011-80 и ГОСТ Р 51841-2001. Фактически в ПА используются следующие стандартные диапазоны аналоговых сигналов: 0...10 В, 0...±10 В, 1...5 В, 4...20 мА, 0...20 мА. ГОСТ Р 51841-2001 не рекомендует применять диапазон 0...20 мА в новых разработках для обеспечения диагностики обрыва датчиков. Модули ввода обычно имеют программно устанавливаемые для каждого канала диапазон входных сигналов из определенного состава (например, модуль NL-8TI [НИЛ АП] имеет входные диапазоны ±15, ±50, ±100, ±500 мВ; ±1, ±2, 5 В, ±20 мА). Входы могут быть · потенциальными – аналоговая информация датчика содержится в уровне его постоянного выходного напряжения; · токовыми - информация датчика содержится в значении его постоянного выходного тока; Входное сопротивление потенциальных входов нормативно должно быть не менее 10 кОм для диапазона 0...10 В и 0... ±10 В, не менее 5 кОм для диапазона 1...5 В. Входное сопротивление токовых входов не должно превышать 300 Ом для диапазона 4...20 мА. Однако для таких датчиков, как термопары, терморезисторы, тензорезисторы из-за их широкой распространенности нормирующие преобразователи часто встраивают в сами средства ввода и все более широкое распространение получают достаточно универсальные конфигурируемые средства ввода. Примером может служить состав используемых датчиков контроллеров ОВЕН, конфигурируемых по специальной программе для ПК, подключаемого к контроллерам:
Кроме универсальных средств аналогового ввода, в ПА используются также и средства ввода, специализированные по определенным видам сигналов датчиков.
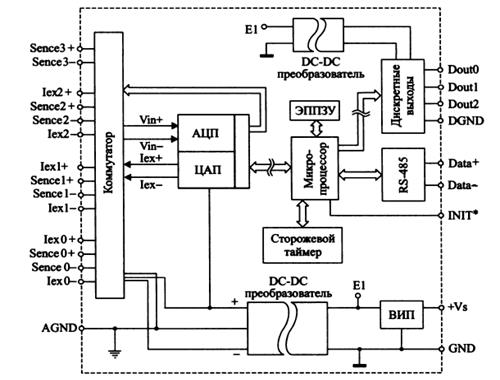
Структура средств ввода аналоговых сигналов. Типовая структура средств удаленного ввода аналоговых сигналов на примере модуля NL-4RTD [НИЛ АП]. Функциональная схема модуля показана на рис.3.1.
Рис.3.1. Структура модуля NL-4RTD [НИЛ АП] ввода сигналов термосопротивлений.
Основной частью модуля ввода является АЦП, использемй для ввода всех аналоговых сигналов (обычно2, 4, 8 или 16). Для подключения источников сигнала(датчиков) к АЦП используется аналоговый коммутатор на МОП-транзисторах. Ввод нескольких сигналов выполняется последовательно во времени. При необходимости одновременного ввода, используют специальные модули с поканальными АЦП. В модулях ввода обычно используют дифференциальные входы, которые позволяют выполнить более помехозащищенный канал передачи аналогового сигнала по сравнению с одиночными (не дифференциальными) входами. Некоторые модули (например, NL-8AI[НИЛ АП]) позволяют программно задавать конфигурацию вида входов: дифференциальные или одиночные. Входные цепи средств ввода принято защищать от статического электричества, от повышенного напряжения и изменения его полярности. Для защиты используют специальные микросхемы защиты с активным элементом в виде МОП-транзисторного ключа. При повышении напряжения выше допустимого ключ запирается, предохраняя чувствительные входы от повышенного напряжения. Сопротивление открытого МОП ключа практически не вносит погрешность в результат измерения. Для этого ключ используют либо для передачи потенциала, когда ток, протекающий через открытый ключ, пренебрежимо мал, либо для передачи тока, когда информация переносится в виде тока и поэтому падение напряжения на ключе не вносит погрешность в передаваемый сигнал. Современная элементная база позволяет строить недорогие модули аналогового ввода с погрешностью измерений ±0, 05 %, что еще 10 лет назад достигалось лишб в стационарных и дорогих вольтметрах. Коммутацией входных сигналов к АЦП обычно управляет собственный микроконтроллер модуля. Однако эту несложную программу может выполнять микроконтроллер, входящий в состав некоторых АЦП (АЦП на рис. 3.1). Это позволяет уменьшить количество каналов гальванической развязки между аналоговыми входами и портом RS-485. Основные функции микропроцессора типового модуля ввода: · реализация протокола обмена с СПУ; · исполнение команд СПУ для модуля; · реализация функций автоматической калибровки, диагностики обрыва или к.з. в цепях датчиков; · преобразование форматов вводимых данных (инженерный (в единицах измеряемой величины), 16-ный, в % от диапазона измерений); · установление скорости обмена с СПУ (для модуля удаленного в/в); · цифровая фильтрация входного сигнала (в некоторых модулях эта операция выполняется контроллером, встроенным в АЦП). В постоянной памяти ЭППЗУ модуля хранятся калибровочные коэф-ты, адрес модуля, программа, таблицы линеаризации нелинейных характеристик термопар и термопреобразователей сопротивления. Сторожевой таймер выполняет перезагрузку (сброс) микроконтроллера в случае его зависания. Питание модуля выполняется от внутреннего стабилизатора напряжения, который позволяет подавать внешнее напряжение питания в широком диапазоне, обычно от 10 до 30 В. Большой диапазон напряжений питания очень полезен в распределенных системах, когда модули ввода могут находиться на значительном расстоянии друг от друга и поэтому падение напряжения на сопротивлении проводов питания достигает 10...20 В. Цепи питания модулей защищаются от неправильной полярности напряжения питания и от превышения напряжения питания над допустимым значением. Защита выполняется диодами, стабилитронами, позисторами и плавкими предохранителями. Для интерфейса RS-485 используется защита от статического электричества, от электромагнитных импульсов, от короткого замыкания и перегрева выходного каскада. Дополнительно может быть выполнена защита на позисторах и стабилитронах от повышенного напряжения в линиях связи. В этом модуле ввода имеются каналы вывода дискретных сигналов, что позволяет реализовать также и ПИД-регулятор с широтно-импульсным (ШИМ) управлением исполнительным устройством.
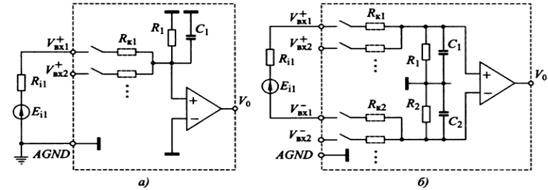
Потенциальный вход. Используется для измерения напряжений и должен иметь бесконечно большое сопротивление и нулевую емкость, поскольку при подключении к измеряемой цепи он не должен влиять на ее динамические и статические характеристики. В реальных условиях внутреннее сопротивление источника сигнала Ri1 и сопротивление открытого ключа Rк1 образуют делитель напряжения с входным сопротивлением R1 на постоянном токе и емкостью С1 в динамическом режиме (рис. 3.2, а). Поэтому полное входное сопротивление модуля ввода вносит методическую мультипликативную погрешность в результат измерения, которую всегда нужно оценивать, исходя из паспортных данных средства вода. Типовыми значениями входных параметров являются Rк1 ≈ 200 Ом, Ri ≈ 20 МОм, С1 ≈ 1 нФ, поэтому для обеспечения методической погрешности величиной 0, 01 % сопротивление источника сигнала должно быть не более ≈ 2 кОм. Однако, поскольку указанная погрешность не зависит от напряжения источника сигнала, ее можно скомпенсировать в СПУ или контролере модуля ввода. Сопротивления и емкость, показанные на рис. 3.2, а, образуют фильтр низкой частоты 1-го порядка с постоянной времени Т ≈ ( Rк1 + Ri ) С1 ≈ 1.2мкс при Rк1 ≈ 200 Ом, Ri ≈ 20 КОм, С1 ≈ 1 нФ, (считаем, что R1 > > Ri1 + Rк1), который вносит также динамическую погрешность в результат измерения. Динамическая погрешность зависит от формы входного сигнала и может быть оценена по методике, изложенной в гл. 4.хх
Рис. 3.2. Потенциальные одиночный (а) и дифференциальный (б) входы
Для модулей с дифференциальными входами (рис. 3.2, б) оценка методической погрешности делается аналогично. Для уменьшения погрешности следует увеличивать входные сопротивления R1, R2 и уменьшать емкости C1, C2. Однако в схеме с дифференциальным включением это приведет к росту емкостной наводки (см. гл.3хх), а также к увеличению синфазной помехи, вызванной входными токами операционного усилителя и атмосферным электричеством. Синфазная помеха может стать настолько большой, что напряжения на входах операционного усилителя выйдут за границы динамического диапазона. Поэтому при работе с дифференциальными входами следует соблюдать правила выполнения сигнального заземления, изложенные в гл 3хх. Вывод AGND на рис. 3.1 и 3.2 следует соединять с экраном кабеля источника сигнала или не соединять ни с чем.
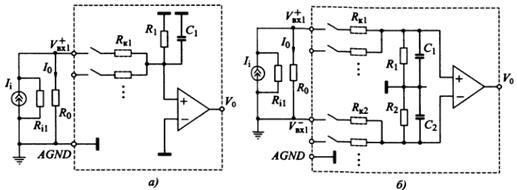
Токовый вход. Преобразование тока в напряжение выполняется с помощью резистора 125, 250 или 500 Ом, с максимальным падением напряжения 2.5; 5 или 10 В соответственно. Измерительные резисторы могут быть установлены снаружи модуля ввода (на его входных клеммах) или внутри него. Для ввода полученного напряжения используется модуль с дифференциальным или одиночным входом (рис.3.3). Измерительные резисторы могут быть прецизионными, тогда для получения точных измерений достаточно откалибровать модуль только в режиме ввода напряжений. При использовании резисторов низкой точности их погрешность можно скомпенсировать путем калибровки модуля совместно с измерительным резистором, в режиме измерения тока. Однако для этого необходимо выполнить калибровку каждого канала отдельно. Если модуль не позволяет выполнять индивидуальную калибровку каждого канала, то формулу для внесения поправок и ее коэф-ты можно сохранить в энергонезависимой (например, флеш) памяти контроллера. При использовании диапазона 0...20 мА ток напряжение составляет V0 = R0*Ii , для диапазона 4...20 мА: V0 = 20mA * R0* ( Ii - 4мA)/16мA. При этом току 4 мА соответствует выходной сигнал, равный нулю. Смещение уровня нуля на 4 мА необходимо для обеспечения возможности диагностирования обрыва в цепи датчика, (гл. 8хх).
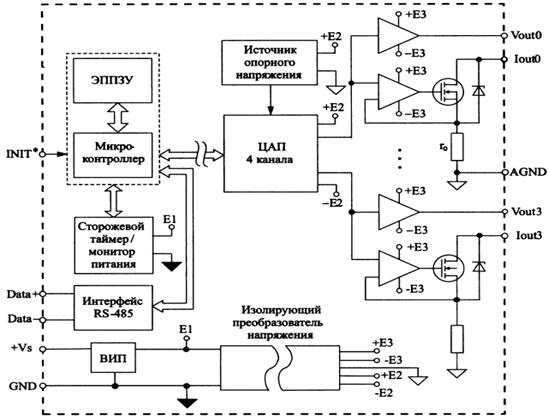
Рис. 3.3. Токовый вход на основе одиночного (а) и дифференциального (б) потенциального входов Вывод аналоговых сигналов Аналоговые сигналы на выходе средств вывода обычно являются стандартными сигналами тока (0...20 и 4...20 мА) или напряжения (0...5, ±10 В). Эти сигналы используются для управления аналоговыми исполнительными устройствами ПА. Структуру типового модуля вывода аналоговых сигналов показана на рис. 3.4.).
ВИП - вторичный источник питания
Рис. 3.4. Структурная схема модуля удаленного вывода аналоговых сигналов NL-4AO[НИЛ АП].
Информация поступает из СПУ обычно через интерфейс RS-485 (в некоторых модулях вывода используют другие последовательные или параллельные интерфейсы). Типичным для средств ПА является гальваническая изоляция аналоговой выходной от цифровой, включающей микропроцессор. Модуль управляется командами, посылаемыми с помощью стандартного протокола Modbus RTU или DCON. Вывод напряжений осуществляется с помощью цифро-аналогового преобразователя (ЦАП) и операционного усилителя (ОУ). Благодаря глубокой обратной связи выходное сопротивление ОУ на постоянном токе составляет сотые доли ОМа, что позволяет с высокой точностью считать его идеальным источником напряжения. Для защиты от перегрузки по выходу используются ОУ с защитой, выполненной на том же полупроводниковом кристалле, что и сам ОУ. Вследствие частотной зависимости коэф-та усиления выходное сопротивления каскада на ОУ rвых (f) зависит от частоты:
rвых (f) = (r0 /K0) (f1 /f) (3.1)
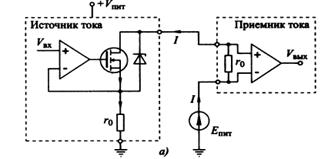
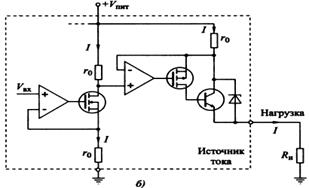
где f - частота, r0 – выходное сопротивление ОУ без обратной связи; f1 - частота единичного усиления ОУ, обычно равная 1 МГц; К0 – коэф-т усиления ОУ на постоянном токе (на нулевой частоте). Приведенное выражение справедливо с погрешностью около 10 % при f0 < f < 10 f1 , где f0 ≈ f1 * K0 - граничная частота ОУ без обратной связи по уровню 0, 702 (например, при типовых значениях r0 = 100 Ом, f1 = 1 МГц; К0 = 10 5 получим rвых = 10 -3 Ом на постоянном токе, но rвых = 1 Ом на частоте 1 кГц и rвых = 10 Ом на частоте 10 кГц. Частотную зависимость выходного сопротивления следует учитывать при расчете уровня наведенных помех, а также методической погрешности модуля вывода, обусловленной влиянием сопротивления нагрузки на величину выходного напряжения. Для вывода аналогового сигнала в форме тока используются источники тока на основе ОУ с обратной связью (на рис. 3.4 - каскады с выходами Iout0,..., Iout3 ). Принцип их действия основан на том, что ОУ с отрицательной обратной связью имеет нулевое напряжение между его входами благодаря высокому коэф-ту усиления. Поэтому все входное напряжение оказывается приложенным к сопротивлению r0 (на рис. 3.4 верхний по схеме каскад) и выходной ток равен входному напряжению, деленному на r0. Чтобы ток, протекающий через r0, был точно равен выходному току, выходным является полевой транзистор с изолированным затвором или пара из биполярного и МОП-транзистора. Модуль комплексного выходного сопротивления источника тока rвых (f) можно найти, используя простейшую модель МОП-транзистора, учитывающую его выходное сопротивление:
rвых (f)= (Rd + r0) Sr0 f1 / K0 f ≈ Rd Sr0 f1 / K0 f (3.2)
где Rd - дифференциальное выходное сопротивление МОП-транзистора; S – его крутизна; остальные параметры имеют тот же смысл и порядок типовых величин, что и в (3.1). Для типовых значений этих параметров и при Rd = 100 кОм получим rвых = 5 10 11 Ом, т.е. выходное сопротивление фактически определяется сопротивлением утечек печатной платы. Однако на частоте f = 10 кГц модуль rвых = 50 МОм и далее падает с ростом частоты.
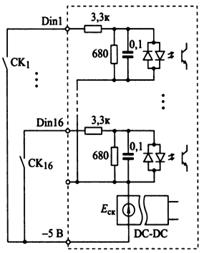
Таким образом, источник тока с достаточно высокой степенью точности для всех частот можно считать «идеальным», и его выходное сопротивление можно не учитывать при использовании типовой нагрузки 250 Ом в стандартной «токовой петле» 4...20 мА. Для питания транзистора в источниках тока, требуется дополнительный источник питания Епит, который обычно располагается вне модуля вывода ((рис. 3.5), и гл. ХХХ 2). Стабилитрон на рис. 3.5 служит для предохранения транзистора от внешних напряжений неправильной полярности и превышения напряжения над допустимым значением. Недостатком приведенного каскада является невозможность изменения направления тока на противоположное, что связано с применением транзисторов одного типа проводимости или с одним типом канала. Более сложные 2-полярные схемы в модулях вывода для ПА не применяются. Состав погрешности средств вывода: · погрешность дискретности ЦАП; · стабильность источника опорного напряжения; · внутренний шум; · ненулевое выходное сопротивление. Погрешность типового модуля ввода (на примере модуля NL-4AO [НИЛ АП], составляет 0, 1 % от верхней границы диапазона (±10 В для потенциального выхода и 0...20 мА для токового), разрядность - 12 бит, дискретность изменения выходной величины - 5 мВ для напряжения и 5 мкА для тока, т.е. 0, 05 % от ширины диапазона. Ввод дискретных сигналов В системах ПА широко распространены бинарные (двоичные) сигналы, поступающие от концевых выключателей, датчиков охранной или пожарной сигнализации, датчиков заполнения емкостей, сбегания ленты на конвейере, приближения и т.п. Такие сигналы, имеющие 2 уровня (состояния) не совсем правильно называют дискретными, но этот термин прочно вошел в практику. Модули ввода дискретных сигналов в ПА имеют несколько различных типов входов: · вход типа «сухой контакт»; · дискретный вход для логических сигналов в форме напряжения; · вход дискретных сигналов 110...220 В. «Сухим» контактом в системах автоматизации называют источник информации, не имеющий встроенного источника энергии, например контакты реле или дискретные выходы типа «отрытый коллектор». Для определения состояния такого контакта необходим внешний источник тока или напряжения. Типичная структура средства ввода дискретных сигналов на примере модуля NL-16DI [НИЛ АП]. представлена на рис.3.6.
Конденсатор используется во входных каскадах модулей (рис.3.7, 8) для фильтрации высокочастотных помех. Значение граничной частот выбирается в результате компромисса между быстродействием модуля и возможностью ложного срабатывания при воздействии высокочастотных помех. Типовое значение граничной частоты и скорости опроса входов составляет1 кГц. Для увеличения помехоустойчивости используют также триггеры Шмидта на выходе сигналов оптронов.
Уровень логической единицы дискретных сигналов составляет обычно от 3 до 30В, уровень логического нуля - от 0 до 2 В. Для ввода сигналов от источников типа «сухой контакт» используют источник напряжения Еск, как показано на рис.3.8. Аналогично подключают дискретные выходы типа «открытый коллектор». Источник может быть как встроенным в модуль дискретного ввода (как, например, в модуле NL-16DI [НИЛ АП]), так и внешним. Ввод высокого постоянного напряжения выполняется по схеме рис.3.7, однако для снижения мощности, рассеиваемой на токозадающем резисторе, используют оптроны с малым управляющим током и резистор с большим сопротивлением и большим пробивным напряжением. Ввод дискретных сигналов 220 В. Ввод сигналов высокого переменного напряжения осуществляется аналогично рассмотренному выше (рис.3.9), однако вместо токозадающего резистора для включения оптрона используют конденсатор, чтобы снизить активную рассеиваемую мощность. Резистор 750 кОм на рис.3.9 служит для разряда конденсатора при отключенных входах, что является стандартным требованием электробезопасности. Резистор 1 кОм ограничива Каскады для ввода высокого напряжения могут быть с общим проводом или независимые. Для отображения состояния дискретных входов (включено/выключено) используют светодиоды, которые включают либо до оптрона, либо после него. Вывод дискретных сигналов Вывод дискретных сигналов используется для управления состоянием включено / выключено исполнительных устройств. Устройства вывода отличаются большим многообразием. Выходные каскады со стандартными ТТЛ или КМОП логическими уровнями в ПА используются редко, поскольку нагрузкой дискретных выходов являются не логические входы электронных устройств, а чаще всего электромеханические реле, пускатели, шаговые двигатели и др. Дискретные выходы обычно строятся на основе мощных биполярных транзисторов с открытым коллектором или полевых транзисторов (обычно МОП) с открытым стоком (рис.3.10).
По схемотехнике применения эти каскады эквивалентны, поэтому их называют каскадами ОК. Они обеспечивают большую гибкость, позволяя получить необходимые для нагрузки ток или напряжения с помощью внешнего источника питания. Кроме того, каскад ОК с помощью внешних резисторов и источников напряжения позволяет получить стандартные КМОП или ТТЛ-уровни Vвых (рис.3.10, 11). Наилучшим решением для построения дискретных выходов являются микросхемы интеллектуальных ключей, содержащих не только мощный транзистор с открытым стоком, но и цепи его защиты от перегрузки по току и напряжению, от к.з., переполюсовки и перегрева, а также электростатических разрядов. При перегреве выходного каскада или превышении тока нагрузки интеллектуальный ключ выключается. Наиболее широко распространены выходные каскады ОК модулей вывода 2-х типов: для втекающего (рис.3.12) и вытекающего (рис.3.13) токов. Различие состоит в том, какой вывод является общим для нескольких нагрузок: заземленный или соединенный с шиной питания. Каскады с открытым коллектором (стоком) удобны тем, что позволяют использовать внешний источник питания с напряжением, отличным от напряжения питания модулей вывода (рис.3.12.13). Кроме того, в этих схемах вместо источника питания Епит можно использовать тот же источник, что и для питания модулей вывода ( Vпит ).
Для управления нагрузками, питающимися большим током или от источника напряжения 110...220 В используют выходные каскады с э-м или твердотельными (полупроводниковыми) реле, тиристорами, симисторами. Основное преимущество э-м реле - очень низкое падение напряжения на замкнутых контактах, что исключает необходимость их охлаждения. Недостаток - ограниченное количество срабатываний (порядка 10 5. ..10 6 ). Полупроводниковые реле, наоборот, имеют относительно большое сопротивление в открытом состоянии и требуют отвода тепла, но могут выполнить до 10 10 переключений. Кроме того, полупроводниковые реле обладают более высокой надежностью и не имеют эффекта «дребезга контактов».
При использовании твердотельных реле или тиристоров в высоковольтных цепях с длинными кабельными линиями используют защиту на варисторах (рис.3.16), TVS-диодах и газовых разрядниках (подробнее гл.ХХ 3). Популярное:
|
Последнее изменение этой страницы: 2016-06-05; Просмотров: 1323; Нарушение авторского права страницы
 Микроконтроллер модуля выполняет периодическое или по запросу СПУ сканирование входов и устранение эффекта «дребезга» «сухих» контактов. Команды опроса входов, установления адреса, скорости обмена, формата данных и др. посылаются в модуль через последовательный интерфейс, обычно RS-485.
Микроконтроллер модуля выполняет периодическое или по запросу СПУ сканирование входов и устранение эффекта «дребезга» «сухих» контактов. Команды опроса входов, установления адреса, скорости обмена, формата данных и др. посылаются в модуль через последовательный интерфейс, обычно RS-485.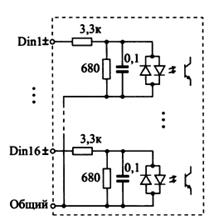
 ет бросок тока во момент коммутации входа. Назначение других элементов аналогично рис.3.7, 8.
ет бросок тока во момент коммутации входа. Назначение других элементов аналогично рис.3.7, 8.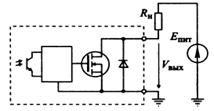 Рис.3.10. Структурная схема выходных каскадов типа ОК для вывода дискретных сигналов
Рис.3.10. Структурная схема выходных каскадов типа ОК для вывода дискретных сигналов
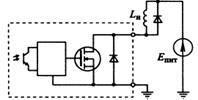 Рис.3.11. Подключение индуктивной нагрузки к дискретному выходу
Рис.3.11. Подключение индуктивной нагрузки к дискретному выходу
 Рис.3.12. Структурная схема выходных каскадов для втекающих токов
Рис.3.12. Структурная схема выходных каскадов для втекающих токов
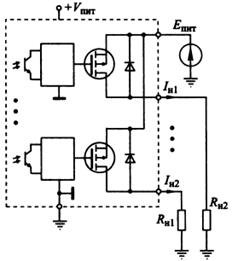 Рис.3.13. Структурная схема выходных каскадов для вытекающих токов
Рис.3.13. Структурная схема выходных каскадов для вытекающих токов
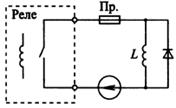 Рис.3.14. Релейный выход. Применение диода для устранения искрения контактов реле при коммутации индуктивной нагрузки
Рис.3.14. Релейный выход. Применение диода для устранения искрения контактов реле при коммутации индуктивной нагрузки
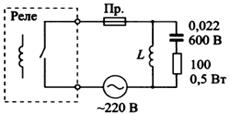 Рис.3.15. Релейный выход. Применение RC-цепочки для предотвращения искрения контактов при коммутации индуктивной нагрузки
Рис.3.15. Релейный выход. Применение RC-цепочки для предотвращения искрения контактов при коммутации индуктивной нагрузки
 При использовании реле для коммутации индуктивной нагрузки возникает большая э.д.с. самоиндукции, которая вызывает пробой воздушного зазора при размыкании контактов и их искрение. Это приводит к быстрому износу контактов и появлению э-м помех. Проблема решается с помощью диода, включенного параллельно катушке индуктивности при коммутации в цепи постоянного напряжения (рис.3.14) и RC-цепочкой в цепи переменного напряжения (рис.3.15). Контакты реле желательно защищать предохранителями.
При использовании реле для коммутации индуктивной нагрузки возникает большая э.д.с. самоиндукции, которая вызывает пробой воздушного зазора при размыкании контактов и их искрение. Это приводит к быстрому износу контактов и появлению э-м помех. Проблема решается с помощью диода, включенного параллельно катушке индуктивности при коммутации в цепи постоянного напряжения (рис.3.14) и RC-цепочкой в цепи переменного напряжения (рис.3.15). Контакты реле желательно защищать предохранителями.