|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Термопреобразователи сопротивления (терморезисторы)
Термопреобразователи сопротивления (терморезисторы, резистивные термопреобразователи, термометры сопротивления) являются вторыми по распространенности в промышленных СИ температуры после термопар. Принцип их действия основан на зависимости электрического сопротивления металла (по ГОСТ 6651-94 используется медь, платина и никель) или полупроводника от температуры. Зависимость сопротивления от температуры R(t) в узком диапазоне температур приближенно можно считать линейной: R(t) = R0(1 + at), где R0 - сопротивление при температуре t = 0°С, а - температурный коэф-т сопротивления. Нормируемыми параметрами металлических термопреобразователей являются сопротивление R100 при 100°С и отношение W100 = R100/R0, где R0 - сопротивление при 0°С. При этом: а = (W100 -1)/100 Преимущество металлических датчиков - высокая линейность и взаимозаменяемость, достигаемая благодаря малому технологическому разбросу сопротивлений датчиков (от ±0, 15 % при температуре 0 °С для медных датчиков класса «А» до ±0, 5 % для датчиков класса «С» по ГОСТ 6651-94). Разброс сопротивлений увеличивается с ростом температуры. В широком диапазоне температур линейная зависимость дает слишком большую погрешность, поэтому ГОСТ 6651-94 устанавливает для термопреобразователей сопротивления табличную или полиномиальную аппроксимацию экспериментально полученной зависимости сопротивления от температуры, что позволяет исключить систематическую составляющую погрешности нелинейности из результата измерений. Эта процедура обычно выполняется в микроконтроллере средства ввода. После исключения систематической составляющей погрешности остается случайная составляющая, обусловленная технологическим разбросом сопротивления датчика при 0 °С и разбросом его температурного коэф-та сопротивления. Она вносит основной вклад в результат измерения температуры и нормируется для 3-х классов допуска: А, В и С (Приложение 2.2). Источником погрешности является также электротермический эффект, при соединении никелевых или медных термопреобразователей с медными проводами. Обычно он не превышает 20 мкВ. Для уменьшения этого эффекта используют среднее значение 2-х измерений при противоположных направлениях тока или измерения на переменном токе. Терморезистор состоит из термочувствительного элемента (сенсора) и защитной оболочки. Сенсор может быть изготовлен в виде катушки с бифилярной намоткой (безиндуктивная намотка сдвоенным проводом) или проводникового слоя металла, нанесенного на диэлектрическое основание.
Погрешность термического шунтирования - методическая погрешность перераспределения теплоты между объектом измерений с малой теплоемкостью и датчиком Стабильность - неизменность показаний с течением времени.
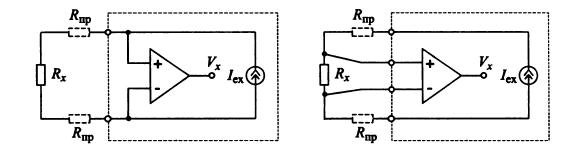
Для уменьшения погрешности термического шунтирования следует правильно выбирать размер (теплоемкость) датчика или учитывать эту погрешность расчетным путем. Для малоразмерных датчиков существенную роль играет величина измерительного тока Iех (ех - от excitation - возбуждение). Мощность Iех2 * R(t), выделяемая при прохождении измерительного тока через датчик с сопротивлением R(t), преобразуется в тепло, вызывающее саморазогрев датчика. Для уменьшения этого эффекта следует снижать величину измерительного тока, однако это приводит к уменьшению отношения сигнал / шум и увеличению случайной составляющей погрешности измерений. Лучшие результаты дает измерение с помощью импульса, длительность которого выбирается из условия минимизации энергии, поступающей в резистор за время измерения. Медные датчики изготавливаются с W100 = 1, 4260 и W100 = 1, 4280, платиновые - с W100 = 1, 3850 и W100 = 1, 3910, никелевые – с W100 = 1, 6170. Медные датчики используются в диапазоне от -200 до +200 °С, платиновые - в диапазоне от -260 до +850 °С, никелевые - от -60 до +180 °С. Параметр W100 и класс допуска указываются в маркировке датчика. Сопротивление R0 и вид используемого материалауказывается в его обозначении (например, ТСМ 50 - термопреобразователь сопротивления медный, 50 Ом), Никелевые термопреобразователи имеют высокую чувствительность, платиновые - высокую стабильность, медные - низкую цену и наилучшую линейность зависимости сопротивления от температуры. В отличие от металлических термопреобразователей полупроводниковые терморезисторы (термисторы) имеют столь большой разброс параметров, включая линейность, что, как правило, требуют индивидуальной градуировки и не обеспечивают взаимозаменяемости. Их достоинством являются малые размеры, низкая стоимость и высокая чувствительность к изменению температуры. Для измерения температуры с помощью термосопротивлений необходимо измерять величину омического сопротивления датчика, включенного последовательно с сопротивлением подводящих проводов. В ПА используются 3 варианта схем измерений: 2-, 3-, 4-проводная. 2-проводная схема измерений. Использует косвенный метод измерений напряжения (рис. 1.2, а) на сопротивлении Vx, вызванное протекающим калиброванным током возбуждения Iех. Реже задается калиброванное напряжение Vx и измеряется ток Iех. Используется также вариант одновременного измерения тока и напряжения при использовании некалиброванных источников измерительных сигналов. Во всех случаях: Rx = Vx / Iех
Поскольку сопротивление металлических датчиков мало, то большую погрешность в результат измерения вносят сопротивления проводов Rnр (рис. 2.2, а). Поэтому 2-проводная схема измерений используется, когда Rnр малы, например не превышают 0, 1 % от сопротивления датчика R0 (т.е. для медного датчика ТСМ50 с R0 = 50 Ом сопротивление проводов должно быть не более 0, 05 Ом и при использовании проводов сечением 0, 35 мм2 с погонным сопротивлением 0, 049 Ом/м длина пары таких проводов не должна превышать 0, 5 м).
а) б) Рис. 2.2. 2-проводная (а) и 4-проводная (б) схемы измерения удаленного сопротивления
Поскольку рассматриваемая погрешность является систематической, ее можно исключить из результата измерений несколькими способами. Если измерения выполняются при заранее известном сопротивлении проводов Rпр, то величину измеренного сопротивления нужно уменьшить на Rпр. Для более точного исключения этой погрешности нужно учесть зависимость сопротивления проводов от температуры, если известна эта температура. Относительную погрешность измерения сопротивления по 2-проводной схеме можно получить из основного соотношения с учетом погрешности, вызванной нескомпенсированной составляющей сопротивления проводов Δ Rпр:
bх = {(Δ Vx / Δ Vx ) 2 + (Δ Iex: / Δ Iex ) 2 + (Δ Rпр / (Δ Rпр + Rx )) 2}0.5 (2.4)
где Δ Vx - погрешность измерения напряжения; Δ Iex - погрешность задания тока. Здесь использовано квадратичное суммирование погрешностей, поскольку все они независимы и случайны. В случае, когда сопротивление проводов не вычитается из результата измерения, Δ Rпр = 2 Rпр и эта погрешность должна учитываться алгебраически ( гл.ХХХ).
4-проводная схема измерений. Измерение напряжения (рис. 2.2, б) производится непосредственно на выводах термосопротивления Rх. и падение напряжения на сопротивлении проводов Rпр не влияет на результат измерения. Методическая погрешность отсутствует, а относительная погрешность измерения сопротивления определяется только инструментальной погрешностью измерения напряжения и задания тока: bх = {(Δ Vx / Vx ) 2 + (Δ Iex / Iex ) 2} 0.5 (2.5)
Расстояние от средства ввода до датчика ограничивается только уровнем помех, который растет пропорционально длине проводов.
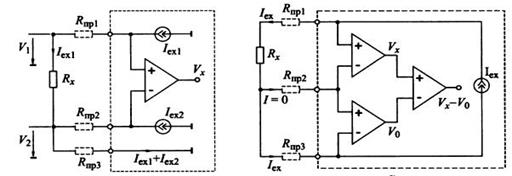
3-проводная схема измерений. Обеспечивает снижение стоимости кабеля при невысоких требованиях к точности измерений. В средствах ввода используются 3 варианта 3-проводных схем измерения сопротивлений, которые отличаются погрешностью и конструкцией измерительного модуля. С появлением интегральных АЦП с 2-мя встроенными цифроуправляемыми источниками тока появилась возможность реализовать 3-проводную схему измерений, показанную на Рис. 2.3, а. Если токи источников тока равны: Iex1 = Iex2 = Iex и равны сопротивления проводов: Rпр1 = Rпр2 = Rпр, а погрешность измерителя напряжения равна нулю, то напряжение Vx между выводами измерителя напряжения на рис. 2.3, а составит:
Vx = (V2 + Rх * Iex1 + Rпр1 * Iex1 ) – (V2 + Rпр2 * Iex2)
а) б) Рис.2.3. 3-проводные схемы измерений удаленного сопротивления с двумя (а) и с одним (б) источником тока
Учитывая идентичность токов и сопротивлений:
Vx = (V2 + Rх * Iex + Rпр * Iex ) – (V2 + Rпр * Iex)
т.е. падение напряжения на проводах взаимно компенсируются благодаря идентичности измерительных токов и сопротивлений проводов. Если же токи Iex1 и Iex2 заданы со случайной погрешностью Δ Iex т.е. Iex1 = Iex1 ± Δ Iex1 , Iex2 = Iex2 ± Δ Iex2 и сопротивления проводов также имеют технологический разброс Rex1 = Rex1 ± Δ Rex1 , Rex2 = Rex2 ± Δ Rex2, а погрешность измерителя напряжения равна Δ V. Тогда из предпоследнего соотношения, пренебрегая составляющими 2-го порядка малости (Δ Rпр Δ Iex по сравнению с Δ Rпр Iex и с Rпр Δ Iex ) получим
Vx = Rх Iex + Rх Δ Iex + 2Rпр Δ Iex + 2 Δ Rпр Iex Δ V (2.6)
Используя правило квадратичного суммирования независимых случайных погрешностей, получаем среднеквадратическую погрешность измерения напряжения:
Δ Vx = {(Rх Δ Iex ) 2 + 2 ( Rпр Δ Iex ) 2 + 2 (Δ Rпр Iex ) 2 + ( Δ V)2}0.5 (2.7)
Относительную погрешность измерений в 3-проводной схеме на рис. 2.2, а, можно рассчитать по (2.5), используя последнее соотношение. Как следует из (2.5) и (2.7), погрешность пропорциональна сопротивлению (длине) провода Rпр и дисбалансу токов источников измерительного тока. Обе эти составляющие отсутствуют в ранее рассмотренной 4-проводной схеме измерений.
Второй вариант 3-проводной схемы измерений показан на рис. 2.3, б. Компенсация падений напряжения на проводах в ней осуществляется благодаря применению 2-го измерителя напряжения V0. Зная V0 и предполагая, что сопротивления Rпр1 = Rпр2 (сопротивление R2 не вносит погрешность, так как ток через него равен нулю), получим:
Vх - V0 = Iех ( Rпр1 + Rх ) – Iех Rпр3 = Iех Rх.
В этой схеме присутствуют те же источники погрешности, что и в предыдущей, поскольку используется тот же принцип компенсации погрешностей, если учесть, что вместо погрешности задания тока вносится погрешность его измерения.
Третий вариант 3-проводной схемы измерений сопротивлений - мост Уитстона (рис. 2.4). В отличие от предыдущих схем с косвенным методом измерения, мост используется для прямого измерения методом сличения с эталоном. В процессе измерений он служит индикатором равенства напряжений левого V1 и правого V2 плеч моста:
V1 = Vех (Rх +Rпр )/(Rх + 2Rпр + RЭ) V2 = Vех R2 /(R1 + R2) (2.8)
В состоянии равновесия V1 = V2 и ( RЭ + Rх) / (Rх + Rпр ) = R1 / R2, откуда и можно найти Rх.
Если мост уравновешен при условии R1 / R2 = 1, то, Rх= Rэ, и сопротивление проводов Rпр не влияет на результат измерения. В средствах аналогового ввода этот метод измерения возможен с помощью цифроуправляемого эталонного резистора однако экономически эффективнее использовать рассмотренные выше схемы с источниками тока. Современные средства ввода сигналов термосопротивлений используют все 3 схемы измерения сопротивлений: 2-, 3-, 4-проводную, Например, рассмотренный модуль NL-4RTD [НИЛ АП] (рис.ХХХ) имеет 6 источников тока Iex0 +, Iex1, + Iex2 +, Iex0 -, Iex1, - Iex2 - (и 4 дифференциальных потенциальных входа ( Sence0+, Sence0 -, Sence3 +, Sence3 -). Это позволяет подключить к нему 4 датчика по 2-проводной схеме, или 4 датчика по 4-проводной схеме, или 3 датчика по 3-проводной схеме измерений, показанной на рис. 2.3, б. Погрешность измерений температуры с помощью термосопротивления включает: · случайная погрешность, вызванная технологическим разбросом сопротивлений и температурных коэф-тов датчиков; · систематическая погрешность, вызванная термоэлектрическим эффектом, когда к платиновому или никелевому датчику подключают обычные медные провода и их соединения имеют разную температуру. Термоэдс возникает также в контактах меди и свинцово-оловянного припоя (величина термоэдс 1...3 мкВ/°С); · тепловой и фликкер-шум измеряемого сопротивления; · систематическая погрешность термического шунтирования (связанная с теплоемкостью датчика); · динамическая погрешность; · саморазогрев датчика; · погрешность метода (схемы измерения), зависящая от длины проводов от средства ввода до датчика; · погрешность измерительного средства ввода. Погрешность средства ввода нормируется при условии, отсутствия сопротивления проводов до датчика. Поэтому эту составляющую погрешности можно рассчитать по (2.7)) и сложить с погрешностью этого средства, но лучше откалибровать его с подключенными к нему проводами нужной длины. О правилах суммирования погрешностей см. главу ХХХ4. Тензорезисторы Тензорезисторы используются для измерения деформации твердых тел. На их основе выполняют датчики веса, давления, силы, перемещения, момента, ускорения, вибрации, натяжения, крутящего момента, остаточных напряжений в механических конструкциях и деталях машин после их обработки и т.д.
Сопротивление твердого тела длиной L с площадью поперечного сечения S составляет R = pL/S, где р - удельное сопротивление тела. При приложении к телу растягивающей силы F (рис. 2.5) происходит его деформация: увеличивается длина тела на Δ L и уменьшается площадь поперечного сечения на Δ S. У большинства тел изменяется также удельное сопротивление на величину Δ р. Если эти приращения малы, то логарифмированием и последующим дифференцированием обеих частей соотношения для R получим:
Δ R/ R= Δ p/p + Δ L/L + Δ S/S
Поскольку площадь поперечного сечения проводника пропорциональна его характерному поперечному размеру d то Δ S/S = 2 Δ d/d и
Δ R/ R= Δ p/p + Δ L/L + 2 Δ d/d = Δ p/p + Δ L/L(1 + 2ν ) = Δ p/p + ε (1 + 2ν ) (2.9)
где ν = Δ d/d / Δ L/L коэф-т Пуассона, для металлов равный v - 0, 25...0, 4; ε = Δ L/L - относительное деформация, удлинение тела. Величина ε безразмерна, но очень мала и для удобства используют такие ее единицы измерения, как мм/м, мкм/м, а в зарубежной литературе - микрострейн или микрос, равная 10-6. У металлов удельное сопротивление меняется слабо, поэтому Δ R/ R= ≈ ε (1 + 2ν ) т.е. относительное изменение сопротивления линейно зависит от относительного изменения длины. Чувствительность тензорезистора к изменению его длины характеризуется коэф-том относительной тензочувствительности GF (Gauge Factor):
GF = ( Δ R/ R) / (Δ L/L) = Δ R/ R / ε (2.10)
Для большинства металлических GF ≈ 2, для платины GF = 6, 1, для некоторых специальных сплавов он может доходить до 10. Для измерения силы с помощью тензорезисторов используют закон Гука, согласно которому при упругой деформации механическое напряжение а пропорционально относительной деформации ε: σ = К ε , где К - модуль упругости. Напряжением σ называется физическая величина, численно равная упругой силе F, приходящейся на единицу площади поперечного сечения тела S. Величина приложенной силы при относительном изменении сопротивления тензорезистора:
F = S σ = SK ε.= SK ( Δ R/ R) / GF (2.11)
Таким образом, измерение силы с помощью тензорезистора сводится к измерению его сопротивления или напряжения на выходе измерительного моста, которое зависит от сопротивления (2.11).
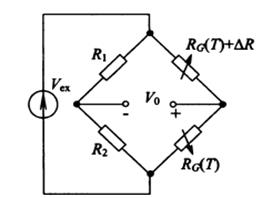
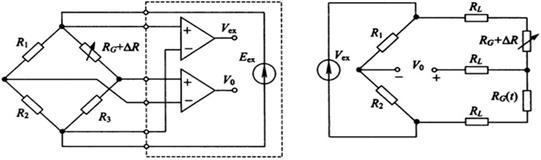
Змеевидная структура датчика обеспечивает большое относительное изменение длины фольги вдоль датчика и очень малое изменение при растяжении датчика в поперечном направлении. Поэтому коэф-т Пуассона в такой структуре минимален. Типовые значения сопротивлений датчиков 120, 350 Ом и 1 кОм. Материалом для тензорезисторов служит константан (45 % Ni, 55 % Си), платина и ее сплавы, нихром (80 % Ni, 20 %Сг), манганин (84 % Си, 12 % Мп, 4 % Ni), никель и др. Для точной передачи растяжения образца через подложку на металлический проводник очень важно правильно прикрепить датчик к испытываемому образцу. Для этого лучше всего пользоваться рекомендациями изготовителей тензодатчиков. Длина чувствительного элемента тензодатчика и длина его подложки изменяются в зависимости от температуры. Поэтому, несмотря на специальные меры, принимаемые при изготовлении тензодатчиков их производителями, существует проблема снижения температурной чувствительности. Она определяется 2-мя физическими явлениями: зависимостью омического сопротивления материала тензорезистора от температуры и паразитным тензорезистивным эффектом вследствие несогласованности температурных коэф-тов расширения тензорезистора и материала объекта, на который наклеен тензорезистор. Измерения с помощью тензодатчиков требуют регистрации очень малых изменений сопротивления. Например, относительное изменение сопротивления, вызываемое относительным растяжением 0, 0005 при тензорезистивном коэф-те, равном 2, составит 0.1%, что для тензодатчика сопротивлением 120 Ом эквивалентно сопротивлению всего лишь 0, 12 Ом. Чтобы измерять столь малое изменение сопротивления и скомпенсировать температурную погрешность, тензодатчики практически всегда используют в мостовой схеме (мост Уитстона, рис. 2.7), подключенной к источнику напряжения или тока (источнику питания моста).
Для проверки правильности калибровки измерительной схемы используют резистор с известным (калиброванным) значением сопротивления, которым шунтируют тензодатчик. Показания измерительной системы должны соответствовать расчетному значению, соответствующему этому сопротивлению. В связи с малостью сигнала от тензодатчика во многих случаях используется режекторный фильтр с частотой 50 Гц. Например, в модуле ввода сигналов тензодатчика NL-2SG (НИЛ АП) использован sinc-фильтр 3-го порядка, подавляющий помеху с частотой 50 Гц на 120 дБ. Выходное напряжение измерительного моста (рис. 2.7) V0 = R3/(R3 +RG) + R2/(R1 +R2) (2.12)
При балансе моста ( R1 / R2 = RG / R3 ) его выходное напряжение отсутствует: V0 = 0. Малейшая разбалансировка из-за изменения сопротивления тензодатчика приводит к появлению напряжения на выходе. Если Δ R -абсолютное изменение сопротивления тензодатчика то из (2.10) следует: Δ R = ε RG GF где RG - сопротивление тензорезистора в ненапряженном состоянии. Если сбалансировать мост таким образом, чтобы при отсутствии растяже-
V0 / Vех= ε GF / 4(1 + ε GF /2)
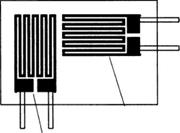
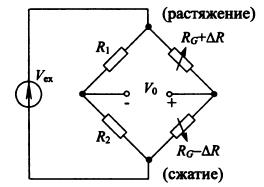
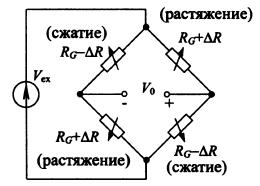
Таким образом, зная напряжение на выходе моста, из (2.12) можно найти относительное удлинение тензодатчика ε , а из (2.11) – действующую силу F. Поскольку относительное удлинение зависит также от температуры, для компенсации температурной составляющей используют 2 тензочувствительных элемента, расположенных на общей подложке перпендикулярно друг другу (рис. 2.8). При этом температурные удлинения обоих элементов одинаковы, а удлинения вследствие воздействия деформирующей силы - разные. Используя эти элементы в разных плечах измерительного моста (рис. 2.9), можно частично скомпенсировать температурную погрешность. Компенсация температурной погрешности, выполняемая изготовителем тензодатчиков, обычно приводит к ошибке не менее 10 микрострейн на градус. Однако, используя полиномиальную аппроксимацию температурной зависимости сопротивления для ее программной компенсации, можно снизить температурную погрешность до 1 микрострейна на градус. В полумостовой схеме (рис. 2.9) можно использовать также 2 тензодатчика с нескомпенсированной температурной погрешностью, если один из них работает на растяжение, 2-ой - на сжатие (например, если измеряется механическое напряжение изгибаемой балки). Таким образом можно повысить чувствительность схемы измерения в 2 раза и одновременно скомпенсировать температурную погрешность (рис. 2.9). Дальнейшего повышения чувствительности схемы измерений можно достичь, если использовать 4 тензодатчика, 2 из которых работают на растяжение, и 2 - на сжатие (рис. 2.10).
Влияние сопротивления соединительных проводов. Сопротивления подводящих проводов. могут достигать единиц и десятков Ом, что при использовании низкоомных датчиков вносит значительную погрешность в результат измерения. Поэтому измерительный мост обычно располагают рядом с датчиком, а сигналы с выхода моста измеряют модулями с высокоомным (потенциальным) входом. Для исключения погрешности, вызванной падением напряжения на проводах, передающих к мосту напряжение питания Veх используют 6-проводное подключение моста (рис. 2.11). В этой цепи напряжение питания моста не задается, а измеряется. Поэтому падение напряжения на проводах питания не вносит погрешность в величину Vex. Если сопротивления проводов невозможно сделать достаточно малыми, их измеряют и учитывают в дальнейших расчетах с целью исключения вносимой ими погрешности. На рис. 2.9, 10, 12 приведены соответствующие соотношения, которые могут быть программно реализованы в микропроцессоре средства ввода сигналов тензодатчиков или в компьютере.
Составляющие погрешности измерения. При использовании тензорезисторов, большинство источников погрешностей аналогичны терморезисторным: · случайная погрешность, вызванная технологическим разбросом сопротивлений тензорезисторов; · систематическая погрешность, вызванная термоэлектрическим эффектом; · тепловой и фликкер-шум измеряемого сопротивления; · температурная погрешность, вызванная разогревом датчика протекающим · погрешность, связанная с разностью температурных коэф-тов расширения тензорезистора и материала объекта, на который наклеен тензорезистор; · погрешность метода (схемы измерения) сопротивления, зависящая от длины проводов и точности измерения их сопротивления; · внешние наводки; · сопротивление контактов; · «ползучесть» сопротивления длительно нагруженного тензорезистора; · погрешность измерительного средства ввода. Вследствие очень малой чувствительности тензорезисторов особую роль играют наведенные помехи. Для их уменьшения используют не витые пары, а плетеные 4 провода, в которых попарно параллельно соединяют провода, проходящие во взаимно перпендикулярных плоскостях. Это устраняет индуктивность обычной витой пары – в виде катушки индуктивности, если смотреть на витую пару с торца.
Популярное:
|
Последнее изменение этой страницы: 2016-06-05; Просмотров: 1584; Нарушение авторского права страницы
 Важно, что результат измерения не зависит от напряжения Vex, в том числе его стабильности и величины помех в цепях питания моста.
Важно, что результат измерения не зависит от напряжения Vex, в том числе его стабильности и величины помех в цепях питания моста. Принцип действия тензорезистора основан на изменении электрического сопротивления твердого тела при его деформации приложенной силой.
Принцип действия тензорезистора основан на изменении электрического сопротивления твердого тела при его деформации приложенной силой.

 Датчики на основе тензорезисторов. Конструктивно металлический датчик на основе тензорезистора (тензодатчик) состоит из очень тонкого провода или, более часто, металлической фольги, сформированной в виде змейки (рис. 2.6) и нанесенной на подложку (носитель). Подложка непосредственно приклеивается к испытываемому телу. Типовая длина тензодатчиков колеблется от 0, 2 мм до 10 см.
Датчики на основе тензорезисторов. Конструктивно металлический датчик на основе тензорезистора (тензодатчик) состоит из очень тонкого провода или, более часто, металлической фольги, сформированной в виде змейки (рис. 2.6) и нанесенной на подложку (носитель). Подложка непосредственно приклеивается к испытываемому телу. Типовая длина тензодатчиков колеблется от 0, 2 мм до 10 см. Общепринятого стандарта для питания моста не существует. Типовыми являются напряжения 3 и 10 В. Ток через тензодатчик обычно составляет от 2 до 30 мА для датчиков с сопротивлением от 1 кОм до 120 Ом соответственно. Напряжение питания моста выбирают по возможности большим, чтобы увеличить отношение сигнал / шум, и в то же время достаточно малым, чтобы минимизировать погрешность, вызванную саморазогревом датчика. Особые требования предъявляются к точности и стабильности напряжения питания моста, если не используется 6-проводная схема подключения датчика (см. рис. 2.12).
Общепринятого стандарта для питания моста не существует. Типовыми являются напряжения 3 и 10 В. Ток через тензодатчик обычно составляет от 2 до 30 мА для датчиков с сопротивлением от 1 кОм до 120 Ом соответственно. Напряжение питания моста выбирают по возможности большим, чтобы увеличить отношение сигнал / шум, и в то же время достаточно малым, чтобы минимизировать погрешность, вызванную саморазогревом датчика. Особые требования предъявляются к точности и стабильности напряжения питания моста, если не используется 6-проводная схема подключения датчика (см. рис. 2.12).