
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Метод итераций (последовательного приближения)
Процесс проектирования ведется в условиях информационного дефицита, который проявляется в следующем: · невозможность заранее точно указать условия работы проектируемого объекта, не зная его конкретного вида и устройства (исходные данные зависят от вида конечного решения); · выявление в процессе проектирования противоречивых исходных данных, то есть невозможность достижения технического решения при первоначально предложенных данных, оказавшихся взаимоисключающими; · появление в процессе проектирования необходимости учёта дополнительных условий и ограничений, которые ранее считались несущественными; · перераспределение по степени важности показателей качества, так как может выясниться, что показатель, ранее считавшийся второстепенным, очень важен (и наоборот). Такая неопределенность устраняется посредством выполнения итерационных процедур: · первоначально задача решается при предположительных значениях исходных данных и ограниченном числе учитываемых факторов (первый цикл итераций, так называемое «первое приближение»); · далее возвращаемся в начало задачи и повторяем её решение, но уже с уточненными значениями исходных данных и перечнем факторов, найденными на предыдущем этапе (второй цикл итераций, «второе приближение»). · и т. д. Число циклов итераций зависит от степени неопределенности начальной постановки задачи, её сложности, опыта и квалификации проектировщика, требуемой точности решения. В процессе приближений возможно не только уточнение, но и отказ от первоначальных предположений. Если хотят подчеркнуть, что первоначальное решение задачи выполнялось в условиях полной или большой неопределенности, первый цикл итераций называют «нулевым приближением». Хотя итерационный метод решения задачи часто связан с большими затратами времени и средств (и чем больше циклов итераций, тем больше затраты), ещё ни одна техническая система (а также законопроект, книга и т. д.) не была создана с первого раза. С другой стороны, желательно не увлекаться итерациями при выполнении дорогих или продолжительных проектных работ. Итерационный подход широко применяется в конструировании. Например, при разработке эскиза узла сначала детали и их расположение показывают предположительно, а затем анализируют получившееся изображение и вносят в него необходимые изменения (согласовываются формы и расположение поверхностей деталей, проверяется нормальное функционирование, увязывается с требованиями стандартов). В частном случае, когда нет никаких предположений по решению задачи, метод последовательных приближений можно сформулировать в виде совета: Если не известно, что и как делать (нет идей, данных, определенности и т. п.), возьмите в качестве исходного решения любое известное (идею, схему, данные, …) или предположите какое-нибудь (но желательно разумное) решение задачи. Проанализировав выбранное решение на соответствие условиям задачи, станет видно, что вас в нём не устраивает и в каком направлении его надо улучшать.
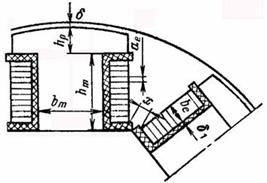
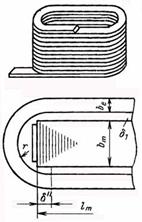
Обмотку возбуждения синхронных машин подключают к источнику постоянного тока, в качестве которого до недавнего времени применялись специальные генераторы постоянного тока – возбудители. В настоящее время для возбуждения синхронных машин все чаще применяют статические устройства, например, комплектные тиристорные возбудительные устройства (ТВУ), особенностью которых является бесконтактное и быстродействующее управление током возбуждения во всех эксплуатационных режимах и наличие автоматического регулирования напряжения. Это повышает надежность и КПД, а также улучшает использование машин. Со схемой и особенностями работы ТВУ можно ознакомиться в пособии [1]. При проектировании обмоток возбуждения для улучшения охлаждения и заполнения катушки медью стремятся увеличить сечение проводников обмотки и уменьшить число ее витков при соответствующем увеличении тока возбуждения. В связи с этим напряжение для питания обмотки возбуждения выбирают низким и в некоторых случаях нестандартным. Предварительно можно принять следующую шкалу напряжений: 25, 35, 46, 65, 80, 100, 115, 160, 200, 230 В, которая не является строго обязательной. В зависимости от конкретной схемы возбуждения напряжения могут выбираться иными. Меньшие значения напряжения выбирают для машин меньшей мощности. При наличии контактных колец и щеток напряжение на обмотке возбуждения Ue выбирают на 1-2 В меньше, чем напряжение ТВУ. Номинальный ток всех типов ТВУ равен 320 А. Обмотки возбуждения машин мощностью свыше нескольких сотен киловатт выполняют однорядными (рис. 11.1) из прямоугольной голой меди сечением больше 30 мм2, намотанной на ребро, а ее МДС увеличивают (для компенсации технологических отклонений и проч.) на 10–20 % по сравнению со значением, полученным из векторной диаграммы для номинального режима: Предварительное значение плотности тока Je выбирают в пределах (3, 5–5, 3)· 106 A/м2, причем меньшие значения соответствуют машинам большей длины и большей мощности. Сечение проводника обмотки возбуждения qe, м2, предварительно определяют по формуле Величина напряжения на обмотке возбуждения (предварительно), В,
где ρ 130 = 1/39· 106 0м· м – удельное сопротивление меди при рабочей температуре обмотки возбуждения 130 °С и изоляции класса В; lеср – средняя длина витка обмотки возбуждения
В приведенной формуле δ 1 = (1, 5–2)· 10-3 м – односторонняя толщина изоляции полюса (рис. 11.2); δ " – расстояние от центра закругления катушки с радиусом r, м, до края штампованной части полюса (табл. 11.1); be –ширина проводника обмотки, которую предварительно можно принять равной (0, 05–0, 1)τ. Таблица 11.1
По конструктивным и технологическим требованиям отношение размеров поперечного сечения проводника обмотки возбуждения должно быть не больше 10–15. Изоляция между витками состоит из двух слоев асбестовой бумаги общей толщиной после опрессовки 0, 3 мм, приклеенной к широкой стороне проводника. Число витков в катушке полюса обмотки возбуждения
Меньший размер прямоугольного проводника определяют в зависимости от выбранной ранее высоты полюсного сердечника
где δ n≈ 0, 3· 10-3 м – толщина изоляции между витками; δ кп=(10–15)· 10-3, м – суммарная толщина изоляции обмотки от полюсного наконечника и ярма ротора (большие значения соответствуют более крупным машинам).
Рис. 11.1 Рис. 11.2 Возможный размер широкой стороны провода, м,
Затем по табл. 6.1 выбирают близкие к найденным размеры стандартной прямоугольной меди ae× be и определяют ее уточненное сечение qe=ae× be. После этого по формуле для расчёта Ток возбуждения
Затем необходимо уточнить высоту сердечника полюса hm и проверить минимальное расстояние между катушками соседних полюсов
которое должно быть не менее 7 мм. После окончательного установления размеров обмотки возбуждения уточняют размеры полюса и, при необходимости, среднюю длину витка. Затем определяют активное сопротивление обмотки возбуждения при 130 и 75 °С. Ток обмотки возбуждения при номинальной нагрузке и температуре 130 °С.
МДС обмотки возбуждения при 130 0С
Проверяют коэффициент запаса возбуждения, который должен быть в пределах 1, 1–1, 25:
После этого уточняют плотность тока
и определяют превышение температуры, °С,
где Допустимое превышение равно 90 и 110 °С соответственно при изоляции классов нагревостойкости В и F. Расчетное значение Δ θ е рекомендуется принимать на 5–15 °С меньше допустимого. Если превышение температуры получится больше или, наоборот, много меньше допустимого, необходимо осуществить пересчет обмотки возбуждения, что может потребоваться и в том случае, если расстояние x будет мало или отрицательно. При пересчете следует попытаться изменить значения следующих величин: плотности тока в обмотке, соотношения между сторонами прямоугольного проводника, высоты и, в небольших пределах (до 6 %), ширины полюсного наконечника, сечения проводника за счет изменения Ue, воздушного зазора машины. 12) Схема математической модели для анализа электрических машин. Этапы расчета характеристик.
????? - Рассмотрим математическую модель электромеханического преобразования энергии на примере обобщенной электрической машины (ЭМ), поскольку ее модель применима для исследования процессов в различных типах электрических машин. Обобщённая ЭМ представляет собой двухполюсную двухфазную симметричную идеализированную машину, имеющую по две пары обмоток на роторе и статоре (рис. 2.1).
Рис. 2.1. Схема обобщенной ЭМ Эта ЭМ имеет гладкий воздушный зазор без пазов на роторе и статоре и обмотками в виде токовых слоёв, имеющих синусоидальное распределение МДС. Магнитная цепь обобщенной ЭМ принимается ненасыщенной во всех возможных режимах работы. При питании обмоток синусоидальным напряжением магнитное поле в воздушном зазоре синусоидальное. Сдвиг обмоток в пространстве на 90о и подача на эти обмотки синусоидальных напряжений с одинаковой амплитудой, сдвинутых во времени на 90о, приведет к возникновению в воздушном зазоре ЭМ вращающегося магнитного поля. Магнитные поля, созданные токами, протекающими в обмотках статора и ротора, неподвижны друг относительно друга. В системе координат a, b оси обмоток статора и ротора совпадают, а ротор неподвижен. Для того чтобы токи, мощности и потери были такими же, как во вращающейся ЭМ, в обмотки ротора необходимо ввести ЭДС вращения wrYrb – wrYra. Потокосцепления обмоток в осях a, b записываются в следующем виде: Ysa = Lsaisa + Mira; Yra = Lraira + Misa; Yrb = Lrbirb + Misb; Ysb = Lsbisb + Mirb, где индуктивности обмоток имеют вид: Lsa = M + lsa; Lra = M + lra; Lrb = M + lrb; Lsb = M + lsb. В свою очередь, индуктивности Lsa, Lra, Lrb, Lsb, как видно из предыдущих выражений, складываются из взаимной индуктивности обмоток М и индуктивностей рассеяния lsa, lra, lrb, lsb. Уравнения электрического равновесия для обмоток статора и ротора имеют вид
В приведенной системе уравнений usa, ura, urb, usb, isa, ira, irb, isb – соответственно напряжения и токи в обмотках статора и ротора по осям a и b; rsa, rra, rrb, rsb – активные сопротивления обмоток статора и ротора. ЭДС вращения в приведенной выше системе дифференциальных уравнений представлены в виде Lrawr + Mwr для обмотки ротора по оси a и – (Lraω r + +Mwr) для обмотки ротора по оси b. где m – число фаз обмотки якоря. Движение ротора ЭМ может быть представлено уравнением где Mс – внешний момент, приложенный к валу ЭМ (если он направлен навстречу электромагнитному моменту Мэ, то в уравнении следует записать знак «–», в случае, когда направления Мэ и Мс совпадают, необходимо суммировать эти моменты); J – момент инерции вращающихся частей ЭМ и приведенный момент инерции связанных с ними тел; wr– частота вращения ротора ЭМ; p – число пар полюсов. В приведенных выше уравнениях имеется пять независимых переменных (напряжения и момент сопротивления) и пять неизвестных (токи в обмотках и угловая частота). Активные сопротивления, индуктивности, взаимная индуктивность и момент инерции являются параметрами и их значения должны быть известны при моделировании. Следует отметить, что даже при постоянных параметрах данная система уравнений является нелинейной и для ее решения необходимо применять методы вычислительной математики и ЭВМ. Для многофазной и многополюсной ЭМ уравнение электромагнитного момента приобретает вид При приведении симметричной m-фазной машины к двухфазной достаточно рассчитывать электромагнитный момент по (2.3), а в уравнениях электрического равновесия оперировать значениями параметров фазной обмотки и фазными токами. Математическая модель асинхронной ЭМ с короткозамкнутой обмоткой ротора. Данная модель может быть получена из уравнений обобщенной ЭМ, в которых необходимо задать ura = urb = 0, а для моделирования асинхронного конденсаторного двигателя оказывается достаточным задание usa = usb и включение последовательно с одной из обмоток статора пускового Сп и рабочего Ср конденсаторов (рис. 2.2).
Рис. 2.2. Схема асинхронного конденсаторного электродвигателя На основании четырех уравнений электрического равновесия и уравнения (2.2), характеризующего движение механической подсистемы ЭМ можно составить соответствующее описание модели и задания на моделирование, применяя описанный в Приложении 1 входной язык программы PSpice [4]. Фрагмент описания рассматриваемой модели приведен в Приложении 2 и снабжен необходимыми комментариями. Представленные математическая и компьютерная модели асинхронной электрической машины являются наиболее компактными. Однако искусственный прием, в соответствии с которым реально вращающийся ротор рассматривается как неподвижный, приводит к отличию некоторых результатов моделирования от реальных показателей электрической машины. В частности, частота токов в обмотках ротора в данной модели не изменяется при изменении частоты вращения самого ротора и остается равной частоте напряжения питания. В этом можно убедиться, проведя моделирование процесса разгона электрической машины и рассмотрев осциллограмму тока в одной из обмоток ротора. Однако известно, что частота токов в обмотках ротора определяется произведением частоты напряжения питания и скольжения. В номинальном режиме асинхронные машины работают со скольженьями, равными 0, 02 – 0, 1. Соответствующим образом изменяется и частота токов в обмотках ротора. Математическая модель асинхронной электрической машины в двухфазной непреобразованной системе координат. Схема модели представлена на рис. 2.3 и отличается от ранее рассмотренных моделей тем, что ротор может вращаться, что приводит к изменению магнитной связи между обмотками статора и ротора в зависимости от угла поворота .
Рис. 2.3. Асинхронная машина в непреобразованной системе координат Напряжения на обмотках статора и ротора где uas, ubs, uar, ubr – соответственно напряжения на обмотках статора и ротора по осям aи b; ias, ibs, iar, ibr – токи в обмотках статора и ротора; Yas, Ybs, Yar, Ybr– потокосцепления обмоток. Потокосцепления обмоток статора и ротора: Yas= Lasias + Miar cos q – Mibr sin q; Ybs= Lbsibs – Mibr cos q – Miar sin q; Yar= Lariar + Mias cos q – Mibs sin q; Ybr= Lbribr – Mibs cos q – Mias sin q, где Las, Lbs, Lar, Lbr – полные индуктивности обмоток статора и ротора, M – взаимная индуктивность обмоток при совпадении направлений их осей; q – угол поворота ротора относительно статора. Производные потокосцеплений по времени: Электромагнитный момент где m – число фаз электрической машины; p – число пар полюсов. В качестве примера рассмотрим создание компьютерной модели данной электрической машины на входном языке программы PSpice, используя соотношения (2.4) – (2.6). В выражения (2.5) входят производные токов по времени. Поскольку напряжение на индуктивности пропорционально скорости изменения тока, т.е. Математическая модель синхронной ЭМ фазовых координатах. Допущения, принимаемые при моделировании процессов в синхронных электрических машинах, аналогичны условиям, оговоренным ранее при описании обобщенной электрической машины. Общие уравнения электрического равновесия для обмоток синхронной ЭМ в естественных или фазовых координатах a, b [3] (рис. 2.5) имеют вид Потокосцепления обмоток определяются из выражений: Yas = Lasias + Miarcosq; Ybs= Lbs ibs + Miar cos q; (2.8) Yar = Lar iar + Mias cos q + Mibs sin q. Как видно из приведенных выражений для потокосцеплений, магнитные связи обмоток статора и ротора изменяются по гармоническому закону. Подставив (2.8) в (2.7) и взяв производные потокосцеплений по времени при условии, что частота вращения ротора остается неизменной в течение переходных электромагнитных процессов, получаем
Рис. 2.5. Модель синхронной электрической машины Электромагнитный момент может быть определен из выражения Представленная система уравнений (2.9 – 2.10) позволяет исследовать синхронные ЭМ в переходных и установившихся режимах работы
13) Расчет магнитной цепи электрических машин. Разбиение магнитной цепи на участки. Магнитное напряжение воздушного зазора, зубцов, ярма, полюсов. Электромагнитное поле электрической машины образуется МДС обмоток статора и ротора, расположенных в пазах магнитопроводов или на сердечниках явно выраженных полюсов. Неравномерность распределения проводников обмотки по объему машины, нелинейность магнитной характеристики и сложность конфигурации магнитопроводов, а также наличие воздушного промежутка между статором и ротором делают точный расчет поля в машине, практически, невозможным даже при применении современных вычислительных средств. Поэтому при проектировании машины пользуются рядом упрощающих допущений. 4.1. ОСНОВНЫЕ ПОЛОЖЕНИЯ РАСЧЕТА МАГНИТНОЙ ЦЕПИ
В целях упрощения расчета магнитная цепь машины подразделяется на ряд последовательно расположенных вдоль силовой линии участков, каждый из которых имеет сравнительно простую конфигурацию и состоит из материала с определенной магнитной характеристикой. Магнитное напряжение на каждом из участков цепи определяют приближенно, принимая напряженность поля в пределах границ участка неизменной и равной расчетному для данного участка ее значению Hi. Тогда суммарная МДС магнитной цепи Методы расчета магнитных напряжений различных участков цепи имеют особенности, обусловленные размерными соотношениями, характером распределения потока, необходимостью учета влияния потока рассеяния и другими факторами. 9.9. РАСЧЕТ МАГНИТНОЙ ЦЕПИ Расчет магнитной цепи проводят для режима холостого хода двигателей, при котором для асинхронных машин характерно относительно сильное насыщение стали зубцов статора и ротора. Как отмечено в гл. 4, насыщение зубцовых зон приводит к уплощению кривой поля в воздушном зазоре (рис. 9.44). Пересечение реальной (уплощенной) кривой поля 2 в зазоре с основной гармонической 1 происходит в точках, отстоящих от оси симметрии одного полупериода кривой на угол 35°. Поэтому за расчетную индукцию принимается не амплитудное значение, а Врасч = Вmax cos ψ ≈ Вmax cos 35° ≈ 0, 82 Bmax. По Врасч следует
Рис. 9.44. Распределение индукции в воздушном зазоре асинхронного двигателя: 1 — ненасыщенного (синусоидальная кривая); 2 — насыщенного (уплощенная кривая)
определить Нрасч по основной кривой намагничивания и увеличить затем результат в k = 1/ 0, 82 раз, приведя напряженность к амплитудному значению индукции. Для воздушного зазора, имеющего линейную зависимость Н = f (B), эта операция равносильна непосредственному определению магнитного напряжения зазора по Вδ . При определении магнитных напряжений участков магнитной цепи с нелинейными магнитными характеристиками влияние уплощения учитывается специальными кривыми намагничивания для зубцов и ярм асинхронных двигателей, построенными по основной кривой намагничивания с учетом указанных зависимостей. При этом принимают аδ = 2/ π ≈ 0, 637 и kв = π / (2 Расчет магнитной цепи проводят в следующей последовательности. 9.9.7. Магнитное напряжение воздушного зазора Расчет магнитного напряжения воздушного зазора, как и всех последующих участков магнитной цепи, рекомендуется проводить на два полюса машины, т.е. вдоль замкнутой силовой линии потока полюса. Возможен также расчет на один полюс, при этом полученные по расчетным формулам данного параграфа магнитные напряжения участков цепи Fi, необходимо уменьшить в 2 раза, а при определении намагничивающего тока (см. ниже) суммарное магнитное напряжение всей цепи соответственно увеличить в 2 раза. Окончательный результат от этого не меняется. Магнитное напряжение воздушного зазора, А, Fδ = где Bδ — индукция в воздушном зазоре, Тл, рассчитанная по (9.23) по окончательно принятому числу витков в фазе обмотки w1 и обмоточному коэффициенту kоб1 определенному для принятой в машине обмотки; δ – воздушный зазор, м; kδ – коэффициент воздушного зазора, рассчитанный по (4.15) или (4.16); μ 0 — магнитная проницаемость: μ 0 = 4 • 10-7 Гн/м. 9.9.2. Магнитное напряжение зубцовой зоны статора Общая формула для расчета магнитного напряжения зубцовой зоны статора FZ1 = 2hz1 Hz1, (9.104) гдеhz1 — расчетная высота зубца статора, м; Hz1 — расчетная напряженность поля в зубце, А. Напряженность поля в зубце определяют по кривым намагничивания для зубцов принятой при проектировании марки стали (см. Приложения 1 и 2). Расчетную высоту зубцов hz1 и расчетную напряженность поля Hz1 определяют по-разному в зависимости от конфигурации зубцов, связанной с формой пазов статора. Зубцы с параллельными гранями (в статорах с грушевидными или трапецеидальными пазами по рис. 9.29). Индукция в зубце BZ1 = где hZ1 — расчетная ширина зубца, м, определяется по формулам табл. 9.15; если размеры b'Z1 и b" Z1 одинаковы, то bz1 = b'z1 = b" z1; если размеры b'Z1 и b" z1 различаются менее чем на 0, 5 мм, то bz1 = 0, 5(b'z1 + b" z1). При различии, превышающем 0, 5 мм, следует либо скорректировать размеры паза, либо определить расчетную напряженность поля Hz1 как для зубцов с изменяющейся площадью поперечного сечения (см. ниже); kс1 — коэффициент заполнения сталью сердечника статора (см. табл. 9.13). Расчетная напряженность поля, А/м, Hz1 = f (Bz1). Магнитное напряжение зубцовой зоны FZ1 = 2hZ1 HZ1. (9.105a) Зубцы с изменяющейся площадью поперечного сечения (в статорах с прямоугольными пазами по рис. 9.28). Расчетная высота зубца hZ1 = hП. Расчетная напряженность поля Hz1 = (HZ1max + 4HZ1ср + HZ1min ) / 6, (9.106) где Hz1max, Hz1min и Hz1ср — напряженности поля в наименьшем, наибольшем и среднем сечениях зубца, определяемые по индукциям в этих сечениях: BZ1max, BZ1min и Bz1cp = 0, 5(BZ1max + ВZ1min). Индукции Вz1max и Вz1min рассчитывают по (9.105), подставляя в формулу вместо размера bz1 соответственно наименьшее и наибольшее значения ширины зубца, м, рассчитанные по формулам табл. 9.15. Магнитное напряжение зубцовой зоны, А, Fz1 = 2hz1 Hz1. (9.107) Практикуют также определение расчетной напряженности по индукции в поперечном сечении зубца на расстоянии 1/3 высоты от его наиболее узкой части. В этом случае в (9.105) вместо bz1 подставляют значение bz1/3 (см. табл. 9.15). Расчетная напряженность поля в зубце Hz1 = Н z1/3 = f B z1/3 . Если индукция в каком-либо одном или в нескольких сечениях зубца окажется больше 1, 8 Тл, то необходимо учесть ответвление части потока зубцового деления Фtz = Bδ tz1 lδ в паз, при котором действительная индукция в зубце уменьшается по сравнению с рассчитанной по (9.105). Метод определения действительной индукции изложен в гл. 4. При его использовании коэффициенты kП рассчитывают для каждого из сечений зубца, в котором индукция превышает 1, 8 Тл, и соответствующего ему по высоте сечения паза. По значению kП и расчетной индукции определяют действительную индукцию в данном сечении зубца. В зубцах с параллельными гранями при индукции выше 1, 8 Тл коэффициент kП рассчитывают по соотношению площадей поперечных сечений зубца и паза на середине высоты зубца. В зубцах с изменяющейся площадью поперечного сечения при определении расчетной напряженности по B z1/3 коэффициент kП рассчитывают по соотношению площадей поперечных сечений зубца и паза на высоте 1/3 наиболее узкой части зубца. Это приводит к некоторой погрешности в определении расчетной напряженности поля в зубце, но при средних уровнях индукций, характерных для зубцовой зоны статора, эта погрешность не оказывает заметного влияния на результаты расчета. 9.9.3. Магнитное напряжение зубцовой зоны ротора Расчет магнитного сопротивления зубцовой зоны ротора зависит от формы пазов и типа ротора: фазный ротор или короткозамкнутый с одной обмоткой (беличьей клеткой) или короткозамкнутый ротор с двумя обмотками — рабочей и пусковой (ротор с двойной беличьей клеткой). К последнему типу относят также одноклеточные короткозамкнутые роторы с одной беличьей клеткой, имеющие фигурные пазы — лопаточные или колбообразные, которые при расчете рассматривают как роторы с двойной беличьей клеткой. Магнитное напряжение зубцовой зоны фазного и короткозамкнутого роторов с одной беличьей клеткой с прямоугольными или с трапецеидальными пазами (по рис. 9, 32, а, б; 9.40 и 9.41, а). Общая формула расчета магнитного напряжения Fz2 = 2hz2 Hz2. (9.108) где hz2 — расчетная высота зубца (по табл. 9.20), м; Hz2 — расчетная напряженность поля в зубце ротора, А/м. Расчетная напряженность поля Hz2 в зубцах с параллельными гранями (см. рис. 9.40, а, б), Тл, определяется в зависимости от индукции в зубце
где kc2 — коэффициент заполнения сердечника ротора сталью (см. табл. 9.13); bZ2 — ширина зубца ротора, м, определяется по формулам табл. 9.20. Если расчеты b'Z2 и b" Z2 (табл. 9.20) дают одинаковые результаты, то bz2 = b'Z22 = b" Z2. Если полученные размеры b'Z2 и b" Z2 различаются менее чем на 0, 5 мм, то bz2 = 0, 5 (b'Z2 + b" Z2). При различии, превышающем 0, 5 мм, следует либо скорректировать размеры паза с целью уменьшить это различие, либо определить расчетную напряженность поля как для зубцов ротора с изменяющейся площадью поперечного сечения (см. ниже). Расчетная напряженность поля в зубце
Расчетная напряженность поля в зубцах ротора с изменяющейся площадью поперечного сечения (по рис. 9.32; 9.41, а; 9.42). Расчетная напряженность поля определяется как средняя HZ2 = (HZ2max + 4 HZ2cp + HZ2min) / 6, (9. 110) где HZ2max, HZ2min, и HZ2cp — напряженности поля в наибольшем, наименьшем и среднем сечениях зубца, определяемые по индукциям в этих сечениях зубцов ВZ2max, ВZ2min, и ВZ2cp = 0, 5 (ВZ2max + BZ2min). Индукции Bz2max и Bz2min рассчитывают по (9.109), подставляя в эту формулу вместо размера bZ2 соответственно наименьшее (bz2min) и наибольшее (Bz2mах) значения ширины зубца, полученные по формулам табл. 9.20. При расчете магнитного напряжения по напряженности поля в сечении на 1/3 высоты зубца ротора находят индукцию ВZ1/3, подставляя в формулу (9.109) вместо bz2 ширину зубца bz1/3 (табл. 9.20). В этом случае расчетная напряженность
Если при расчете магнитного напряжения зубцов с переменным сечением HZ2max > 2HZ2min, то более точные результаты дает деление зубца по высоте на две равные части и определение средних напряженностей в каждой из них в отдельности. В этом случае расчетная ширина зубца принимается на высоте 1/3 каждой части, т. е. на высоте, приблизительно равной 0, 2 и 0, 7 всей высоты паза от его наиболее узкой части:
Определив индукцию Bz0, 2 и Bz0, 7 в этих сечениях зубца, находят соответствующие им напряженности поля HZ0, 2 и HZ0, 7. Магнитное напряжение зубцовой зоны, А, в этом случае Fz2 = hz2 (Hz0, 2 + Hz0.7), (9.112) Необходимо отметить, что для всех сечений зубцов, расчетная индукция в которых превышает 1, 8 Тл, необходимо определить действительную индукцию, т. е. учесть уменьшение потока в зубце за счет ответвления части потока зубцового деления в паз, как это указано в расчете зубцового напряжения зубцовой зоны статора. Магнитное напряжение зубцовой зоны ротора с фигурными пазами и с двойной беличьей клеткой. При фигурных пазах ротора или двойной беличьей клетке рассчитывают раздельно магнитные напряжения верхней и нижней частей зубцов, А:
где hz2В и hz2H — расчетные высоты верхней и нижней частей зубца, м, определяемые по формулам табл. 9.21 и 9.20; Hz2B и Hz2H — расчетные напряженности верхней и нижней частей зубца, А/м. Расчет индукции для определения расчетных напряженностей Нz2В и Нz2H проводят по формулам, аналогичным приведенным выше для одноклеточных роторов, формулы для определения ширины зубцов в различных сечениях приведены в табл. 9.21 и 9.22 в зависимости от конфигурации пазов (рис. 9.45 и 9.46). Магнитное напряжение зубцовой зоны роторов с фигурными пазами или с двойной беличьей клеткой, А/м, FZ2 = 2 (Fz2B, + Fz2H). (9.114) Популярное:
|
Последнее изменение этой страницы: 2016-06-05; Просмотров: 1327; Нарушение авторского права страницы
 .
. , задавшись значением тока 320 А.
, задавшись значением тока 320 А.




 уточняют напряжение питания обмотки возбуждения и с учётом падения напряжения 1-2 В в щёточном контакте выбирают из предложенной выше шкалы напряжений ближайшее большее значение.
уточняют напряжение питания обмотки возбуждения и с учётом падения напряжения 1-2 В в щёточном контакте выбирают из предложенной выше шкалы напряжений ближайшее большее значение.




 ,
,  – линейная скорость ротора, м/с.
– линейная скорость ротора, м/с.






 , (2.1)
, (2.1) , (2.2)
, (2.2) . (2.3)
. (2.3)

 ;
;  ;
;  ;
;  , (2.4)
, (2.4) ;
;  ;
;  ;
;  . (2.5)
. (2.5) , (2.6)
, (2.6) , то можно составить вспомогательную схему, содержащую последовательно соединенные источник тока, управляемый током и индуктивность единичного значения и определить производную тока как напряжение на индуктивности. В предлагаемой схеме идеальный реактивный элемент замкнут на идеальный источник тока. Для выполнения расчета потребуется добавить последовательное сопротивление очень малого значения.
, то можно составить вспомогательную схему, содержащую последовательно соединенные источник тока, управляемый током и индуктивность единичного значения и определить производную тока как напряжение на индуктивности. В предлагаемой схеме идеальный реактивный элемент замкнут на идеальный источник тока. Для выполнения расчета потребуется добавить последовательное сопротивление очень малого значения. ;
;  . (2.7)
. (2.7) ;
;  ; (2.9)
; (2.9) .
.
 . (2.10)
. (2.10)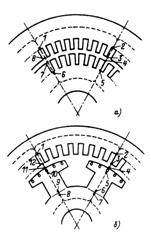


 ) ≈ 1, 11.
) ≈ 1, 11. (9.103)
(9.103) (9.105)
(9.105) (9.109)
(9.109)

 (9.111)
(9.111) (9.113)
(9.113)