|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Согласованное управление разнотемповыми процессамиСтр 1 из 4Следующая ⇒
Курсовая работа Согласованное управление разнотемповыми процессами
Специальность 150300 «Прикладная Механика» Курсовая работа студента третьего курса группы 3055/2 очной формы обучения Грищенко Алексея Ивановича
Санкт-Петербург Год Оглавление. Оглавление Часть 1. Анализ объекта управления. 3 1. Постановка задачи. 3 2. Математические модели объекта управления. 4 2.1. Уравнение в переменных состояния. 4 2.2. Передаточная функция. 5 2.3. Весовая функция. 7 2.4. Уравнение вход-выход. 9 2.5. Частотные характеристики. 10 3. Свойства системы.. 12 3.1. Устойчивость. 12 3.2. Анализ минимально фазовости объекта. 13 3.3. Исследование управляемости и наблюдаемости. 14 3.4. Анализ установившихся режимов. 17 3.5. Окончательный выбор параметров и его обоснование. 18 4. Процессы в объекте управления. 21 4.1. Импульсное воздействие. 21 4.2. Ступенчатое воздействие. 25 4.3.Гармоническое воздействие. 29 Часть 2. Синтез законов управления для систем с обратной связью. 33 1. Структурная схема системы с регулятором.. 33 2. Настройка контура управления. 33 3. Настройка контура оценивания. 37 4. Завершение построения системы. 40 5. Сравнение результатов автоматического управления по средством обратнай связи с командным управлением.. 42 Выводы.. 44 Приложение. 45
Часть 1. Анализ объекта управления. Постановка задачи
В данной работе рассматривается модель развития многоотраслевой экономики В.В. Леонтьева в частном случае для двух отраслей.
ar w: top=" 1134" w: right=" 850" w: bottom=" 1134" w: left=" 1701" w: header=" 720" w: footer=" 720" w: gutter=" 0" /> < w: cols w: space=" 720" /> < /w: sectPr> < /w: body> < /w: wordDocument> ">
Выбранные данные для модели: s w: val=" 24" /> < w: lang w: fareast=" EN-US" /> < /w: rPr> < m: t> 2< /m: t> < /m: r> < /m: sub> < /m: sSub> < m: r> < w: rPr> < w: rFonts w: ascii=" Cambria Math" w: h-ansi=" Cambria Math" /> < wx: font wx: val=" Cambria Math" /> < w: i/> < w: sz w: val=" 24" /> < w: sz-cs w: val=" 24" /> < w: lang w: fareast=" EN-US" /> < /w: rPr> < m: t> =10 < /m: t> < /m: r> < /m: oMath> < /m: oMathPara> < /w: p> < w: sectPr wsp: rsidR=" 00000000" > < w: pgSz w: w=" 12240" w: h=" 15840" /> < w: pgMar w: top=" 1134" w: right=" 850" w: bottom=" 1134" w: left=" 1701" w: header=" 720" w: footer=" 720" w: gutter=" 0" /> < w: cols w: space=" 720" /> < /w: sectPr> < /w: body> < /w: wordDocument> ">
Математические модели объекта управления Уравнение в переменных состояния Вектор состояния представим в следующем виде:
Тогда система линейных дифференциальных уравнений, описывающих систему, выглядит
ar w: top=" 1134" w: right=" 850" w: bottom=" 1134" w: left=" 1701" w: header=" 720" w: footer=" 720" w: gutter=" 0" /> < w: cols w: space=" 720" /> < /w: sectPr> < /w: body> < /w: wordDocument> ">
соответственно запишем следующие матрицы и векторы:
Передаточная функция Так как задача была уже ранее описана в переменных состояний, то сделаем переход по уже имеющейся математической формуле:
Передаточная функция, вычисленная при помощи символьной алгебры в MatLab по той же формуле, которая совпадает с найденной аналитически (М-файл №1 в приложении):
H =(k*(10*k1 + a2*k2 + k1*p))/(p*(p^2 + 110*p - a1*a2 + 1000)) - ((k - 1)*(100*k2 + a1*k1 + k2*p))/(p*(p^2 + 110*p - a1*a2 + 1000)) Очевидно из блок-схемы, что две другие передаточные функции, которые входят в состав уже имеющийся, могут быть представлены в виде:
Очевидно, выполняется равенство, которое следует из блок-схемы и структурных свойств систем управления:
Весовая функция Весовая функция определяется просто: как обратное преобразование Лапласа, от уже найденной передаточной функции, или как некоторое линейное преобразование от также заранее найденных переменных состояния (однако здесь требуется вычисление матричной экспоненты):
Искать весовую функцию буду в виде обратного преобразование Лапласа от передаточной функции. Для упрощения введу некоторые обозначения - это коэффициенты числителя и два корня квадратного уравнения знаменателя, взятые с обратными знаками:
Тогда передаточная функция примет более простой вид, который можно с легкостью разложить по элементарным дробям:
Для которой, обратное преобразование Лапласа можно провести с помощью таблицы:
И задача сводится к определению этих коэффициентов, которые легко находятся после приведения правой части формулы для передаточной функции к общему знаменателю и приравниванию коэффициентов перед р. Составляем систему алгебраических уравнений:
Решая систему, получаем соответственно следующие значения коэффициентов:
Из соображений компактности и читабельности формулы не будем, подставлять значения коэффициентов, а будем считать их константами, которые определяются значениями коэффициентов перекрестных связей и коэффициента усиления.
Результат, который получается при использовании символьной алгебры MatLab (обратное преобразование Лапласа, в случае с вычислением через переменные состояния ответ получается слишком некомпактным, поэтому здесь не приведен): h = ((cosh(t*(a1*a2 + 2025)^(1/2)) + (sinh(t*(a1*a2 + 2025)^(1/2))*((10000*k2 + 110*a1*k1 + 100*k*k1 - 10000*k*k2 + a1*a2*k2 - 110*a1*k*k1 + 110*a2*k*k2 + a1*a2*k*k1 - a1*a2*k*k2)/(100*k2 + a1*k1 + 10*k*k1 - 100*k*k2 - a1*k*k1 + a2*k*k2) - 55))/(a1*a2 + 2025)^(1/2))*(100*k2 + a1*k1 + 10*k*k1 - 100*k*k2 - a1*k*k1 + a2*k*k2))/(exp(55*t)*(a1*a2 - 1000)) - (100*k2 + a1*k1 + 10*k*k1 - 100*k*k2 - a1*k*k1 + a2*k*k2)/(a1*a2 - 1000) Сравним теоритические результаты с результатами полученными численно, с помощью MatLab, подставив определенные численные значения и сравним их (М-файл №2 в приложении): h1 = 0.0217 h = 0.0217 hm= 0.0217
Где h1 – ответ, полученный аналитически h – ответ, полученный при обратном преобразовании Лапласа hm – ответ, полученный при вычислении через переменные состояния Что и следовало ожидать, ответы совпали, значит можно с определенной долей вероятности говорить о верности аналитического решения.
Уравнение вход-выход Обозначим числитель и знаменатель передаточной функции согласно формуле:
Тогда уравнение вход-выход запишется в следующем виде, если вместо переменной р подставить оператор дифференцирования по времени:
Частотные характеристики Для того чтобы найти частотные характеристики системы можно воспользоваться любой из ниже указанных формул, в зависимости от того, что уже известно передаточная функция, весовая функция, уравнение вход-выход или система уже описана в переменных состояния:
Лучше всего пойти самым простым способом и путем заменой переменной в передаточной функции найти искомую функцию, которую требуется представить в следующем виде:
Для простоты нахождения модуля и аргумента искомой функции будем рассматривать отдельно модули и аргументы числителя и знаменателя:
Для символьного решения посредством MatLab ограничимся вычислением частотных характеристик через переменные состояния, чтобы операции не сводились к простому переименованию переменных. Проведем проверку между аналитическим и символьным расчетом в MatLab, при фиксированных значениях параметров (М-файл №3 в приложении):
H =- (k*(10*k1 + a2*k2 + k1*w*i))/(w*(w^2*i + 110*w + a1*a2*i - 1000*i)) + ((k - 1)*(100*k2 + a1*k1 + k2*w*i))/(w*(w^2*i + 110*w + a1*a2*i - 1000*i))
modh = 0.0107 modh1 = 0.0107 argh = -1.7168 argh1 = -1.7168 Ответы совпали, значит, аналитические вычисления верны.
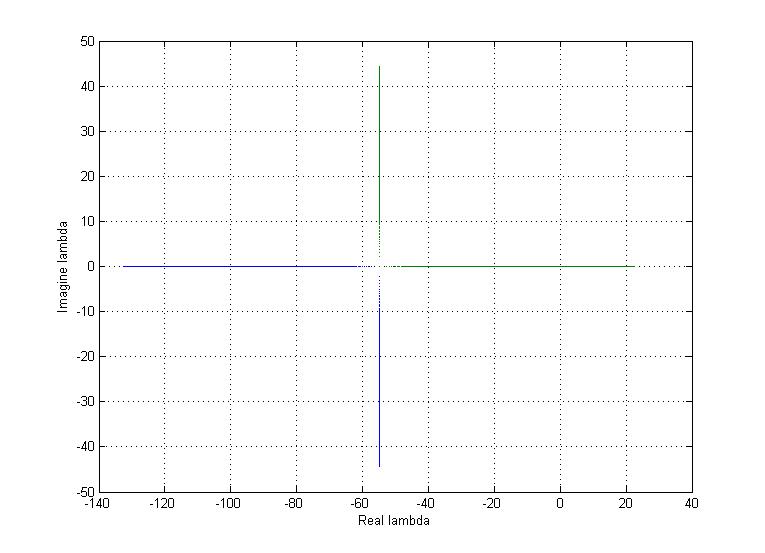
Свойства системы Устойчивость Найдем собственные числа матрицы А (очевидно это корни знаменателя передаточной функции)
Отсюда видим, что имеется 3 собственных числа, из которых одно нулевое, а 2 других зависят от перекрестных связей Для того, чтобы удовлетворить условию Стодолы, которое является в нашем случае не только необходимым условием, но и достаточным, потребуем следующее:
Корневой годограф смотри в приложении.
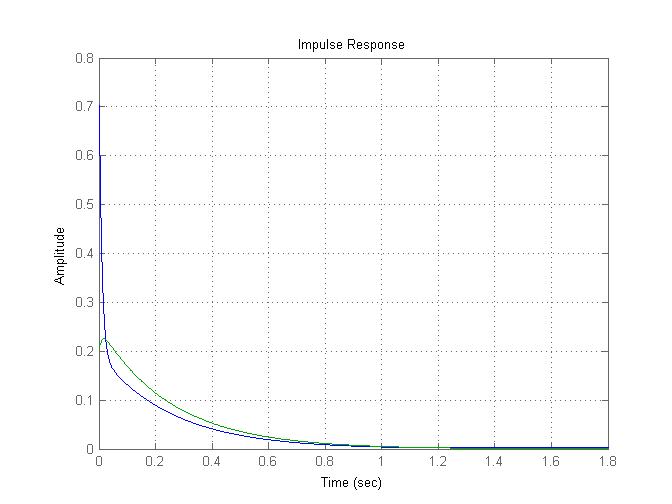
Импульсное воздействие. Теперь рассмотрим реакцию на импульсное воздействие каждой из подсистем и системы в целом. Соответственно реакция всего объекта управления на импульсное воздействие может быть найдена при замене переменных параметров системы уже известными из подраздела 3.5, в формулы для весовой функции.
Строим графики реакции на импульсное воздействие при помощи MatLab (М-файл №5 в приложении):
Сравним данные полученные с помощью MatLab c данными полученными теоритически: a. Установившийся режим:
b. Начальные точки.
В случае импульсного воздействия
Ступенчатое воздействие.
Теперь рассмотрим ступенчатое воздействие на подсистемы и систему в целом. Аналитически реакция на него может быть найдено при помощи простой формулы:
Построим реакции, полученные при помощи MatLab (М-файл №5 в приложении):
Одинаковый уровень установившийся реакции на воздействие в подсистемах объясняется тем, что мы выбирали коэффициенты исходя из соображений их равенства. Тот факт, что оба графика выходят из нуля, можно пояснить следующими формулами:
И то же самое можно показать и для реакции всей системы
В случае ступенчатого воздействия
Выход графиков подсистем реакций на установившийся уровень можно рассчитать по следующим формулам:
А график реакции системы на ступенчатое воздействие не ограничен, что тоже легко увидеть из формулы:
По причине того, что при заданных параметрах мы получаем чисто вещественные корни:
То все характеристики, касающиеся колебательного затухания, можно не рассматривать отдельно, т.к очевидно, что: 1) 2) 3) 4) В таком случае следует говорить о показателях, которые будут определять только вещественную часть корней. 1. 2. 3. Гармоническое воздействие. Для начала опять рассмотрим характеристики инерциальных звеньев. Для этого воспользуемся пакетом MatLab, в котором построим графики их частотных характеристик (М-файл №5 в приложении). Аналогично могут быть посчитаны и построены эти же графики, но уже аналитическим методом, который предложен в разделе 2.5.
Вся логарифмическая характеристика обоих процессов лежит в области ослабления, подавляются все частоты.
Рассмотрим теперь логарифмические характеристики подсистем и системы. Таким образом, анализируя полученные результаты, мы можем сказать, какой будет установившаяся реакция системы на гармоническое воздействие вида:
Приложение М-файл №1. Часть 1. Раздел 2.2 (определение передаточной функции). syms a1 a2 k p k1 k2 A=[-100 a1 0; a2 -10 0; k1 k2 0]; B=[k; 1-k; 0]; C=[0 0 1]; E=[1 0 0; 0 1 0; 0 0 1]; H=C*inv(p*E-A)*B
М-файл №2. Часть 1. Раздел 2.3 (определение весовой функции). syms t a1 a2 k p k1 k2 hm=C*expm(A*t)*B pause h=ilaplace(k*(10*k1 + a2*k2 + k1*p))/(p*(p^2 + 110*p - a1*a2 + 1000)) - ((k - 1)*(100*k2 + a1*k1 + k2*p))/(p*(p^2 + 110*p - a1*a2 + 1000)), t) (1) pause a1=1; a2=2; k=0.8; t=2; k1=0.8; k2=0.7; h=… (2) hm=… (3) h1=… (4)
(1) – выражение взято из М-файла №1 (2) – ответ, полученный в четвертой строчке (3) – ответ, полученный во второй строчке (4) – ответ, полученный аналитически М-файл №3. Часть 1. Раздел 2.5 (частотные характеристики). syms a1 a2 k w k1 k2 A=[-100 a1 0; a2 -10 0; k1 k2 0]; B=[k; 1-k; 0]; C=[0 0 1]; E=[1 0 0; 0 1 0; 0 0 1]; H=C*inv(i*w*E-A)*B pause a1=1; a2=2; k=0.8; k1=0.8; k2=0.7; w=2; modh=abs(…) (1) modh1=… (2) argh=angle(…) (3) argh1=… (4)
(1) – выражение для Н (шестая строчка) (2) – аналитическое выражение модуля (3) – выражение для Н (шестая строчка) (4) – аналитическое выражение аргумента
М-файл №4. Часть 1. Раздел 3.3 (управляемость и наблюдаемость). syms a1 a2 k k1 k2 A=[-100 a1 0; a2 -10 0; k1 k2 0]; B=[k; 1-k; 0]; C=[0 0 1]; E=[1 0 0; 0 1 0; 0 0 1]; P=[B A*B A*A*B] Q=[C' A'*C' A'*A'*C'] pause dP=det(P) dQ=det(Q) pause a1=80; a2=5; k=0.8; dP=… (1) dQ=… (2)
(1) – выражение, полученное для dP (2) – выражение, полученное для dQ М-файл №5. Часть 1. Раздел 4 (импульсное, ступенчатое и гармоническое воздействия). sys1=tf([0.8 23], [1 110 410.717]); sys2=tf([0.2 26.28568], [1 110 410.717]); sys3=tf([0.78 36.8], [1 110 410.717 0]); impulse(sys1) grid on hold on impulse(sys2) figure impulse(sys3) grid on figure step(sys1) grid on hold on step(sys2) figure step(sys3) grid on figure bode(sys1) hold on grid on bode(sys2) figure grid on bode(sys3) figure nyquist(sys1) hold on grid on nyquist(sys2) figure grid on nyquist(sys3)
М-файл №6. Часть 2. Раздел 4 (Завершение построения системы)
A=[-100 75 0; 7.8571 -10 0; 0.8 0.7 0]; B=[0.8; 0.2; 0]; C=[0 0 1]; K=10000*[0.0152 0.0191 1.9565]; L=10000*[0.8940 1.1482 0.0250]; A1=[A-B*K B*K; zeros(3, 3) A-L'*C]; B1=[B; 0; 0; 0]; C1=[C 0 0 0]; sys=ss(A1, B1, C1, 0)
Корневой годограф. q=-4000: 5: 4000; for i=1: 1601 l1(i)=-55-sqrt(2025+q(i)); l2(i)=-55+sqrt(2025+q(i)); plot(real(l1(i)), imag(l1(i)), real(l2(i)), imag(l2(i))) hold on end Курсовая работа Согласованное управление разнотемповыми процессами
Специальность 150300 «Прикладная Механика» Курсовая работа студента третьего курса группы 3055/2 очной формы обучения Грищенко Алексея Ивановича
Санкт-Петербург Год Оглавление. Оглавление Часть 1. Анализ объекта управления. 3 1. Постановка задачи. 3 2. Математические модели объекта управления. 4 2.1. Уравнение в переменных состояния. 4 2.2. Передаточная функция. 5 2.3. Весовая функция. 7 2.4. Уравнение вход-выход. 9 2.5. Частотные характеристики. 10 3. Свойства системы.. 12 3.1. Устойчивость. 12 3.2. Анализ минимально фазовости объекта. 13 3.3. Исследование управляемости и наблюдаемости. 14 3.4. Анализ установившихся режимов. 17 3.5. Окончательный выбор параметров и его обоснование. 18 4. Процессы в объекте управления. 21 4.1. Импульсное воздействие. 21 4.2. Ступенчатое воздействие. 25 4.3.Гармоническое воздействие. 29 Часть 2. Синтез законов управления для систем с обратной связью. 33 1. Структурная схема системы с регулятором.. 33 2. Настройка контура управления. 33 3. Настройка контура оценивания. 37 4. Завершение построения системы. 40 5. Сравнение результатов автоматического управления по средством обратнай связи с командным управлением.. 42 Выводы.. 44 Приложение. 45
Популярное: |
Последнее изменение этой страницы: 2016-06-05; Просмотров: 540; Нарушение авторского права страницы

















































































 , поэтому в указанных выше формулах ее опускаем.
, поэтому в указанных выше формулах ее опускаем.





 , поэтому в указанных выше формулах
, поэтому в указанных выше формулах  , то есть рассматриваем просто пределы передаточных функций.
, то есть рассматриваем просто пределы передаточных функций.