
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Выбор мощности двигателя для повторно-кратковременного режима работы
Если при повторно-кратковременном режиме нагрузка двигателя, время работы tр и время паузы t0 не меняются, и относительная продолжительность включения Если нагрузка Р1 при переходе от цикла к циклу остается неизменной, но не равной Рн, а e отличается от стандартного значения, то, на основании метода средних потерь, можно утверждать, что средняя температура перегрева двигателя не будет превышать допустимого значения, если средние потери мощности за цикл при e¹ eкат не будут превышать средние потери за тот же цикл при e=eс=eкат и Рн, т.е. если
Выбор двигателя по мощности в этом случае сводится к проверке согласно написанному условию предварительно выбранного двигателя с ближайшими к Р1 и e1 значениями Рн и eкат (ε с). Если в написанном выражении потери мощности выразить через постоянные «К» и переменные «V», то после преобразований получим следующую формулу для проверки предварительно выбранного двигателя
Для ДПТ независимого возбуждения, работающих с Ф=const, а также для АД, работающих в пределах линейной части механической характеристики можно получить аналогичное соотношение между моментами, а при работе этих двигателей на естественных характеристиках – соотношение между мощностями
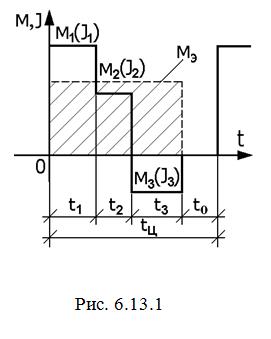
На практике чаще всего нагрузка в пределах цикла не остается постоянной. Поэтому, если известен реальный график М=f(t), его заменяют эквивалентным прямоугольным (рис. 6.13.1) и определяется Мэкв или Iэкв. Применительно к изображенной диаграмме:
Здесь время паузы t0 (в знаменателе под корнем) не входит, поскольку оно учитывается величиной ПВ%. Да и во время паузы двигатель момента не не развивает, т.к. ток =0.
Если расчетная величина продолжительности включения отличается от стандартной, двигатель выбирается по ближайшему стандартному значению ε, пересчитывая мощность двигателя на стандартное значение. При переходе от одной e к другой эквивалентная мощность двигателя, должна оставаться неизменной. Поэтому в соответствие с выражением для Рэ в случае работы двигателя на естественной характеристике можно написать:
Пример пересчета мощности Рх=Р1 от действительной eх=e1, на стандартное значение (каталожное) e2=eкат=eс, выполняются так:
Может быть сделан пересчет на ε с не только мощности, но и эквивалентного тока, определенного из нагрузочной диаграмме, а также эквивалентного момента, если двигатель независимого возбуждения должен работать с Ф=const, а АД – в пределах линейной части механической характеристики
Для более точного пересчета мощности следует исходить не из равенства эквивалентных мощностей, а из равенства потерь, т.е. исходя из соотношений:
∆ Рпк1 и ∆ Рпк2 - потери в двигателе при повторно-кратковременном режиме соответственно с e1 и e2; τ у – время цикла. Выражая потери через постоянные и переменные, учитывая изменение условий охлаждения, т.е. имея в виду, что
При b=1 В случае различных значений tр и t0, входящих в график нагрузки, за относительную e принимается величина, подсчитанная для большого числа циклов работы.
При расчетах следует пользоваться этой средней или эквивалентной величиной, во всех приведенных выше формулах. При проверке мощности предварительно выбранного двигателя по методу средних потерь в случае повторно-кратковременного режима работы, они вычисляются по формуле
∆ Рп, ∆ Рт, ∆ Ру, ∆ Р0 – потери (средние) мощности за время пуска tп, торможения tm, установившейся работы и за время паузы при неподвижном двигателе (в обмотке возбуждения двигателя ДНВ и СД).
6.14 Выбор двигателей для работы в режимах S4 ¸ S8 и выбор преобразователей для регулируемых электроприводов Для электроприводов, предназначенных для работы в режимах S4 и S5, выбираются двигатели, нормально предназначенные для режима S3. Мощность двигателей определяется предварительно на основе нагрузочной диаграммы механизма как и для режима S3. Для выбранного двигателя строится нагрузочная диаграмма электропривода, по которой производится проверка правильности выбора. Для работы в режимах S6 и S7 обычно выбираются двигатели, предназначенные для работы в режиме S1. Если известна нагрузочная диаграмма электропривода M=f(t) или I=f(t), расчет Мэ или Рэ позволяет выбрать двигатель для режима S6, а для режима S7 формулы Мэ и Рэ используются для проверки предварительно выбранного двигателя, т.к. для этого режима расчет и построение достаточно точной нагрузочной диаграммы до выбора двигателя представляет трудности. Для обоих этих режимов обязательна проверка двигателя по условиям пуска и перегрузочной способности. Для работы в режиме S8 как правило выбираются двигатели режима S1. Двигатель выбирается предварительно по нагрузочной диаграмме механизма и затем рассчитывается и строится нагрузочная диаграмма электропривода, M=f(t) или I=f(t) из которой находится Iэ или Мэ за цикл работы и сравнивается с Iн или Мн. Рассмотрим, теперь, как выбираются преобразователи для регулируемых электроприводов. Мощность генератора для системы Г-Д
Рнд и hнд - номинальная мощность и номинальный КПД двигателя. По каталогу (справочнику) выбирается генератор с Рнг³ Рг.расч, обеспечивающий требуемое напряжение двигателя. Мощность гонного (сетевого) двигателя генератора
Рнг и hнг - номинальная мощность и номинальный КПД генератора. По каталогу (справочнику) выбирается асинхронный к.з АД или синхронный двигатель СД с номинальной мощностью Рн.г.д³ Ргон.расч и скоростью, соответствующей скорости генератора, указанной в паспорте генератора. Тиристорный преобразователь для системы ТП-Д выбирается по номинальному выпрямленному току, номинальному выпрямленному напряжению и мощности с учетом необходимости реверса двигателя, т.е. Idн≥ Iн двигателя Udн=Uн двигателя и Sн преобразователя ≥ Рн двигателя. Преобразователь частоты для системы ТПЧ-АД выбирается по номинальному напряжению, номинальному току, номинальной мощности и требуемому диапазону изменения частот. Необходимо, также решить вопрос о типе преобразователя – со звеном постоянного тока или с непосредственной связью.
Популярное:
|
Последнее изменение этой страницы: 2016-07-12; Просмотров: 976; Нарушение авторского права страницы
 равна одному из стандартных значений, то по справочнику или каталогу выбирается двигатель с номинальной мощностью Рн³ Рнагрузки при соответствующей e.
равна одному из стандартных значений, то по справочнику или каталогу выбирается двигатель с номинальной мощностью Рн³ Рнагрузки при соответствующей e. или
или  .
. .
. ,
,  .
. или
или  .
.
 ; или
; или  . Отсюда
. Отсюда 
 и т.д.
и т.д. .
. , где
, где и обозначая через x отношение
и обозначая через x отношение  можно написать, приняв режим с Р1 за исходный
можно написать, приняв режим с Р1 за исходный
 . Отсюда
. Отсюда и
и  .
. , а при пренебрежении постоянными потерями
, а при пренебрежении постоянными потерями  и
и  .
. .
. , где
, где , где
, где - где
- где