
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Нагревание двигателей при повторно-кратковременном режиме работы
Процесс установления температуры в этом режиме при идеализированной нагрузочной диаграмме можно представить в виде рис. 6.5.1. Температура обмоток двигателя изменяется по экспоненциальным кривым и достигает установившихся колебаний с небольшой амплитудой. При правильном выборе двигателя, наибольшая температура не достигнет t¢ уст, а будет стремиться к величине tуст=tдоп.
Если в этом режиме использовать двигатель длительного режима, то за счет охлаждения во время пауз он может работать в повторно-кратковременном режиме с коэффициентом термической перегрузки
t¢ уст - наибольшая температура, которая имела бы место при длительной работе с потерями ∆ Рпк повторно-кратковременного режима. Величина d может быть найдена на том основании, что для цикла работы, достаточно удаленного от начала, температура перегрева колеблется от t0 до tуст. При этом для периода работы, tр можно написать
Температура перегрева в конце паузы понизится до
Отсюда Но поскольку во время паузы Т0> ТН (если охлаждение двигателя естественное), то
На основании выражения для d на рис. 5.6.2 построены кривые зависимости d от e¢ и ε при различных значениях
Для повторно-кратковременного режима выпускается специальная серия машин – крановые и краново-металлургические двигатели (постоянного тока серии Д и переменного тока с к.з. ротором серии MTKF, MTKH, 4АС, с фазным ротором серии МТF, MTH, 4MT). Двигатели, предназначенные для повторно-кратковременного режима конструктивно отличаются от двигателей длительного режима тем, что при одинаковой мощности с последними они имеют меньший момент инерции, что достигается уменьшением диаметра якоря (ротора) при увеличенной длине. Это позволяет уменьшить потери энергии в переходных режимах (уменьшается запас энергии во вращающихся элементах), увеличивается быстродействие, т.к. сокращается время пуска и торможения. В справочниках и каталогах указывается, какую мощность они могут развивать при каждой стандартной ПВ. Для двигателей постоянного тока серии Д и краново-металлургических двигателей переменного тока основной (номинальной) ПВ% является ПВ 40%. Все величины, характеризующие двигатель при основной ПВ% являются номинальными (мощность, ток, момент, скорость), а эти же величины при других ПВ% являются допустимыми по условиям нагрева.
Предварительный выбор двигателей по мощности Для правильного выбора двигателя необходимо иметь его нагрузочную диаграмму. Но в начальной стадии проектирования электропривода проектировщику известна лишь нагрузочная диаграмма рабочей машины и ее тахограмма. Для расчета и построения нагрузочной диаграммы двигателя необходимо сделать расчет его переходных процессов, что требует знания суммарного приведенного момента инерции всей системы привод – рабочая машина. Момент инерции системы в основном определяется моментом инерции самого двигателя. Поэтому, пока двигатель не известен, нельзя приступить к расчету переходных процессов, следовательно, нельзя построить и нагрузочную диаграмму электропривода. В связи с этим приходится выбирать двигатель, предварительно исходя из нагрузочной диаграммы рабочей машины. Двигателю в процессе работы приходится преодолевать в переходных режимах не только статическую, но и динамическую нагрузку, т.к. статическая нагрузка при работе рабочей машины не остается постоянной. Поэтому среднеквадратичное значение момента двигателя получается больше, чем среднее значение статического момента сопротивления, и при предварительном выборе его номинальный момент принимается большим, чем среднее значение Мс. Обычно рекомендуется принимать
Могут быть использованы и такие формулы для ориентированного определения МН двигателя.
По найденному ориентированному значению МН и основной скорости, которая должна быть задана, определяется требуемая номинальная мощность двигателя
Далее проводится расчет переходных процессов и строится нагрузочная диаграмма электропривода M=f(t) или I=f(t). Затем делается проверка выбранного двигателя по перегрузочной способности
М¢ с.макс - приведенный максимальный статический момент сопротивления; lМ – каталожная перегрузочная способность двигателя. После всего этого делается проверка двигателя по нагреву (определяется Мдоп или Рдоп).
Популярное:
|
Последнее изменение этой страницы: 2016-07-12; Просмотров: 724; Нарушение авторского права страницы

 , где
, где .
. , если считать, что двигатель имеет независимую вентиляцию, т.е. Т0=ТН. Подставив значение t0 и разделив обе части равенства на tу, получим
, если считать, что двигатель имеет независимую вентиляцию, т.е. Т0=ТН. Подставив значение t0 и разделив обе части равенства на tу, получим .
. .
. , отсюда
, отсюда , где
, где - приведенный коэффициент продолжительности включения.
- приведенный коэффициент продолжительности включения. . Точки, лежащие на оси ординат, где e¢ =0 и e=0, соответствуют кратковременному режиму работы. Все кривые сходятся в точке с координатами e¢ =1, d=1. Она отвечает длительному режиму работы. Из графика видно, что при e¢ > 0, 6 допустимая тепловая перегрузка незначительна, а коэффициент механической перегрузки
. Точки, лежащие на оси ординат, где e¢ =0 и e=0, соответствуют кратковременному режиму работы. Все кривые сходятся в точке с координатами e¢ =1, d=1. Она отвечает длительному режиму работы. Из графика видно, что при e¢ > 0, 6 допустимая тепловая перегрузка незначительна, а коэффициент механической перегрузки  будет еще меньше. Поэтому при e> 0, 6 практически можно выбирать для повторного кратковременного режима двигатель режима S1.
будет еще меньше. Поэтому при e> 0, 6 практически можно выбирать для повторного кратковременного режима двигатель режима S1.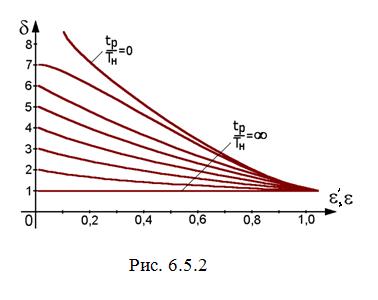
 , где
, где , где
, где  длительность цикла.
длительность цикла. или
или  , где Мс.кв – среднеквадратичное значение статического момента сопротивления, определяемое по нагрузочной диаграмме рабочей машины.
, где Мс.кв – среднеквадратичное значение статического момента сопротивления, определяемое по нагрузочной диаграмме рабочей машины. по каталогу выбирается двигатель и рассчитывается момент инерции системы
по каталогу выбирается двигатель и рассчитывается момент инерции системы .
. , где
, где