|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Регулирование температуры охлаждающей среды
Системы охлаждения современных судовых дизелей в большинстве случаев выполняются замкнутыми. Для обеспечения работы дизеля на оптимальном температурном режиме, при котором достигаются наибольшее значение эффективного к.п.д. двигателя и минимальные износы деталей цилиндро-поршневой группы, температура охлаждающей воды внутреннего контура автоматически поддерживается на заданном уровне. Регулирование температуры охлаждающей воды может осуществляться одним из следующих способов: 1) способом дросселирования, при котором на входе либо выходе воды, охлаждающей двигатель, устанавливается дроссельный клапан, изменяя проходное сечение которого, можно изменять количество воды, проходящей через двигатель; 2) способом обвода, при котором изменяется количество забортной воды, прокачиваемой через холодильник, за счет обвода части ее по байпасному трубопроводу; 3) способом перепуска, при котором часть горячей воды, выходящей из двигателя, по перепускному трубопроводу подается обратно на вход двигателя. Наибольшее распространение в судовых установках получил способ регулирования перепуском, при этом в зависимости от места установки чувствительного элемента можно поддерживать постоянной температуру воды на входе либо выходе из двигателя. На рис. 98 изображена принципиальная схема САР температуры воды с наиболее распространенным местом установки чувствительного элемента на трубопроводе с водой, выходящей из двигателя. В этом случае регулируемой величиной, поддерживаемой с учетом статической ошибки на заданном уровне, является температура воды на выходе, а температура ее на входе будет изменяться в зависимости от режима работы.
Рис. 98. Схема САР температуры охлаждающей воды
Исследования показали, что при принятой схеме регулирования обеспечивается более благоприятное распределение температур в охлаждаемых деталях, чем при регулировании температуры на входе, а переходные процессы при сбросах и набросах нагрузки протекают по экспоненциальному закону. В связи с этим ГОСТ 10150—62 и ГОСТ 12709—67 устанавливают в качестве регулируемой величины температуру воды на выходе из двигателя. При повышении температуры воды САР должна сработать таким образом, чтобы количество воды, проходящее через холодильник, увеличивалось, а идущей на перепуск — уменьшалось. В случае понижения температуры — наоборот. В соответствии с ГОСТ 12709—67 САР температуры охлаждающей воды должна удовлетворять следующим требованиям: ¾ диапазон настройки регулятора — 35-100°С; ¾ неравномерность (статическая ошибка регулирования) — не более 12°С; ¾ нечувствительность — не более 1°С; ¾ инерционность регулятора, под которой понимается время перемещения регулирующего органа на 2/3 полного хода при скачкообразном изменении температуры среды на величину, равную неравномерности регулятора — не более 40 с; ¾ заброс температуры в переходных процессах при единичном скачкообразном возмущении — не более 6°С; ¾ продолжительность переходного процесса в САР при полном сбросе или набросе нагрузки — не более 20 мин для главных двигателей и не более 10 мин для вспомогательных. В САР температуры масла регулируемой величиной является температура масла на входе в двигатель, а регулирование ее обычно осуществляется посредством перепуска части забортной воды, помимо масляного холодильника. В остальном требования к САР температуры масла аналогичны изложенным выше. Регуляторы температуры Регуляторы температуры или терморегуляторы выполняются прямого и непрямого действия. На двигателях небольшой мощности (до 2000 л.с.) преимущественно применяются терморегуляторы прямого действия, на мощных двигателях применяют терморегуляторы как прямого, так и непрямого действия. Регуляторы прямого действия выполняются недистанционными, когда чувствительный элемент встроен в регулирующий орган, и дистанционными. Чувствительные элементы в терморегуляторах применяются парожидкостного и объемного типа.
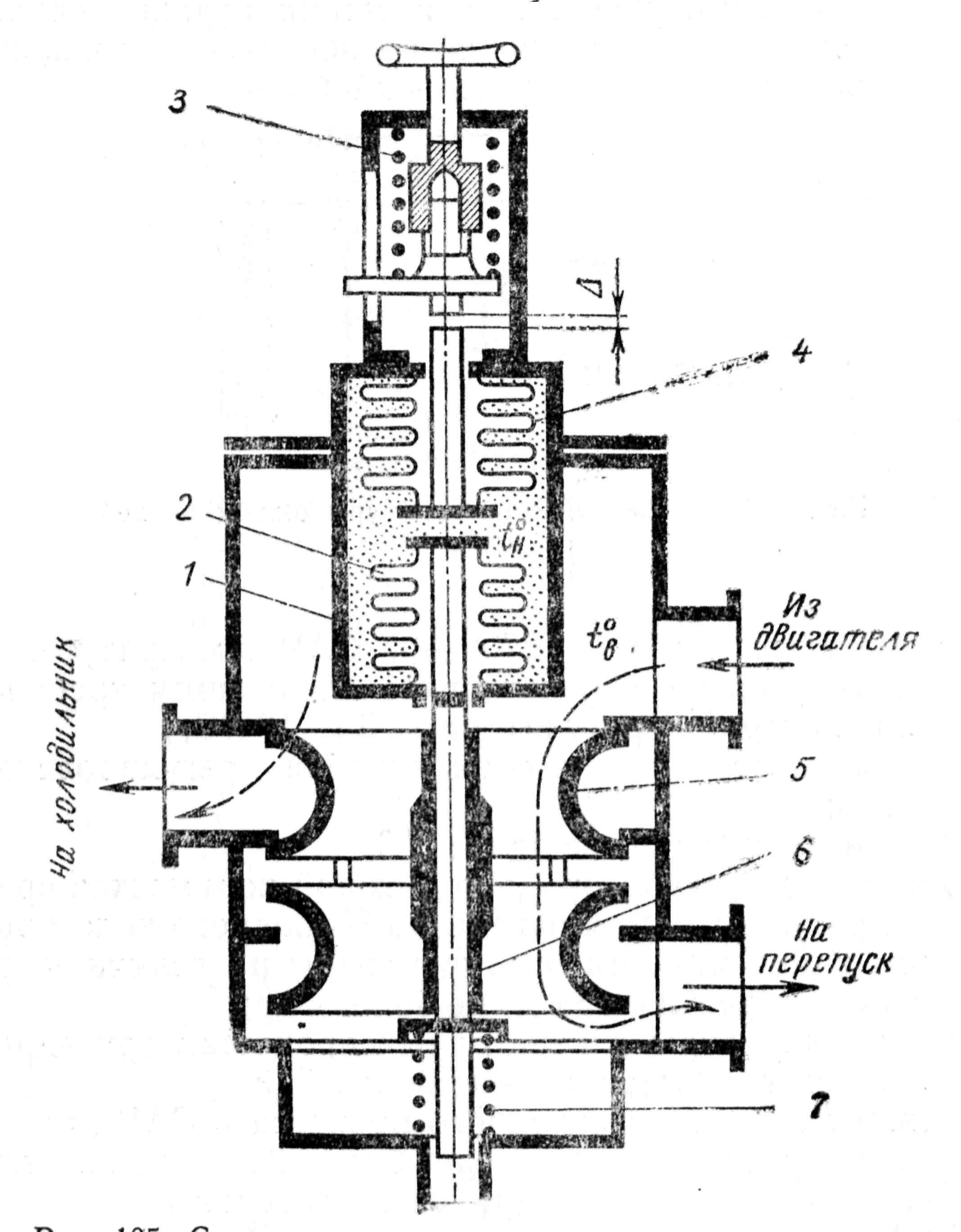
Рис. 99. Схема недистанционного регулятора температуры прямого действия На рис. 99 приведена схема недистанционного регулятора прямого действия с объемным измерителем. Чувствительными элементами в этом регуляторе являются два сильфона 2 и 4. Пространство между сильфонами и кожухом 1 заполнено жидкостью с большим объемным коэффициентом расширения (глицерин, толуол и др.). При увеличении температуры объем жидкости-наполнителя увеличивается, в результате чего будут сжиматься сильфоны 2 и 4. Так как препятствий для перемещения (сжатия) сильфона 4 нет, то при повышении температуры первоначально будет деформироваться сильфон 4 до тех пор, пока не исчезнет установочный зазор D. После этого при дальнейшем повышении температуры станет деформироваться сильфон 2, в результате чего регулирующие органы 5 и 6 будут перемещаться вниз, увеличивая тем самым количество воды, поступающей в холодильник, и уменьшая количество воды, идущей на перепуск. В том случае, если регулирующие органы дойдут до упора, а температура будет повышаться, для предохранения клапана от поломки предусмотрена предохранительная пружина 3, при сжатии которой верхний сильфон сможет получить дополнительное перемещение. При понижении температуры регулирующий орган будет перемещаться вверх под действием возвратной пружины 7. Настройка регулятора на необходимый температурный режим осуществляется за счет изменения зазора D. Статическая характеристика регулятора такого типа приведена на рис. 100. Как видно из рисунка, статическая характеристика является нелинейной и имеет петлеобразный вид. Неравномерность этого регулятора Dtнер = 18°С, а нечувствительность Dtнеч ± 0, 75°С.
Рис. 100. Статическая характеристика недистанционного регулятора прямого действия
Схема дистанционного регулятора прямого действия с парожидкостным чувствительным элементом приведена на рис. 101. Чувствительный элемент 1, капиллярная трубка 2 и полость сильфона 3 заполнены легковскипающей жидкостью. Давление внутри герметичной системы зависит от температуры среды. Настройка терморегулятора осуществляется за счет изменения натяжения пружины 4 при помощи гайки 5. Схема пневматического регулятора температуры непрямого действия с объемным жидкостным чувствительным элементом приведена на рис. 102. Регулятор состоит из следующих конструктивных узлов: чувствительного элемента А; усилительного устройства Б и сервомотора мембранного типа В.
Рис. 101. Схема дистанционного регулятора температуры прямого действия

Рис. 102. Схема регулятора, температуры непрямого действия: 1 — регулирующий клапан; 2 — пружина сервомотора; 3 — мембрана сервомотора; 4 — кулачок-лекало жесткой обратной связи (ЖОС); 5 — толкатель ЖОС; 6 — пружина ЖОС; 7 — мембрана управляющего клапана (позиционера); 8 — управляющий клапан усилителя; 9 — дроссель; 10 — мембрана измерителя; 11 — рычаг измерителя; 12 — пружина измерителя; 13 — винт узла задания; 14 — пружина возврата; 15 — неподвижная опора рычага; 16 — гайка узла задания; 17 — шток чувствительного элемента (ЧЭ); 18 — сильфон ЧЭ; 19 — гильза ЧЭ; 20 — сопло измерителя При повышении температуры среды повышается давление внутри гильзы 19, в результате чего шток чувствительного элемента (ЧЭ) 17 будет свободно перемещаться вверх до тех пор, пока не выберется зазор D. При дальнейшем перемещении штока вверх он будет (через винт узла задания 13) перемещать также вверх гайку узла задания 16 и левый конец рычага измерителя 11, в результате чего уменьшатся деформация и усилие, развиваемое пружиной измерителя 12, мембрана 10 переместится вверх и увеличит проходное сечение для выхода воздуха через сопло измерителя 20. Давление воздуха в камере под мембраной 10, а также на мембрану 7 уменьшится, в результате чего клапан 8, управляющий отводом воздуха в атмосферу, переместится вправо и уменьшит давление воздуха в камере и верхней полости сервомотора В. Мембрана 3 и связанный с ней регулирующий клапан 1 переместятся вверх, при этом количество охлаждающей среды, поступающее на холодильник, увеличится, в результате чего температура ее понизится до заданной. Настройка регулятора на необходимый температурный режим осуществляется путем изменения зазора D с помощью винта 13. Динамика САР температуры Система автоматического регулирования температуры включает в себя многоемкостный объект регулирования с распределенными параметрами. Это обстоятельство объясняется тем, что аккумулирование тепла может осуществляться в металле двигателя, пресной воде, заключенной в его зарубашечном пространстве, и металле корпуса водо-водяного холодильника, а также в трубках и забортной воде, прокачиваемой через холодильник. Температуры как пресной, так и забортной воды вследствие притока и отвода (потерь) тепла в различных местах тракта имеют неодинаковое значение, что приводит к распределенности параметров. При выводе уравнений динамики САР обычно рассматривают упрощенную модель, считая параметры емкостей сосредоточенными. Применительно к схеме, изображенной на рис. 98, математическое описание динамики системы будет состоять из следующих уравнений: 1) дифференциального уравнения 2-го порядка двигателя как теплового объекта регулирования; 2) дифференциального уравнения 2-го порядка водо-водяного холодильника; 3) алгебраического уравнения смесителя; 4) дифференциального уравнения 1-го порядка регулятора температуры. При скачкообразном изменении нагрузки двигателя переходный процесс в САР температуры обычно имеет либо апериодический, либо малоколебательный характер. Продолжительность переходного процесса в зависимости от типа и размера двигателя может меняться в пределах 6—30 мин, при этом большие значения относятся к мощным малооборотным двигателям. Популярное:
|
Последнее изменение этой страницы: 2016-07-13; Просмотров: 1312; Нарушение авторского права страницы