
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Метод размыкания кинематической цепи
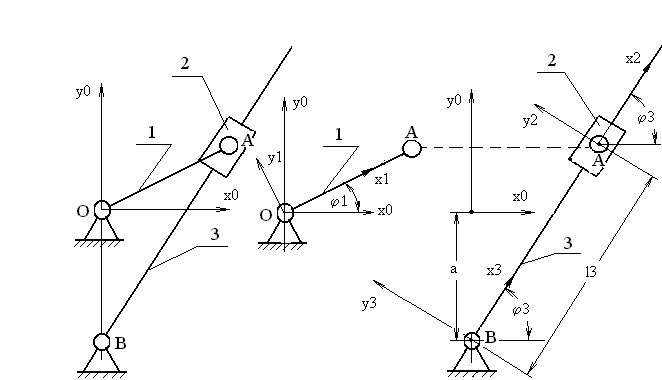
Каждая замкнутая кинематическая цепь может быть представлена в виде нескольких открытых кинематических цепей, если условно разомкнуть одну или несколько кинематических пар. Тогда, для каждой из таких открытых цепей, применим описанный выше общий метод кинематического анализа, с помощью которого определяются положения элементов каждой из разомкнутых кинематических пар в абсолютной системе координат. Приравнивая координаты соответствующих элементов кинематических пар (для каждой из двух открытых кинематических цепей, полученных размыканием одной и той же кинематической пары), получают систему нелинейных уравнений связей, решение которой позволяет определить все обобщенные координаты исходной кинематической цепи как функции независимых обобщенных координат. Рассмотрим четырехзвенный кулисный механизм, представленный на рисунке 4.
Рисунок 4 - Размыкание кинематической пары А кулисного механизма
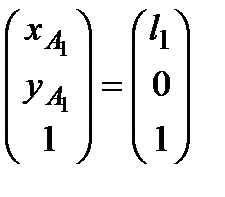
Для открытой кинематической цепи: стойка (0) – кривошип (1), однородные координаты центра элемента кинематической пары
где
тогда:
где Приравнивая правые части равенств (7) и (8), получим систему уравнений связей рассматриваемой кинематической цепи:
Ниже приводится один из вариантов решения системы (9) при > restart; > eq1: =l1*cos(f1)-l3*cos(f3): > eq2: =l1*sin(f1)-l3*sqrt(1-cos(f3)^2)+a: > res: =solve({eq1, eq2}, {l3, f3}): assign(res): l1: =0.2: a: =0.4: > plot(-l3, f1=0..4*Pi);
Конец расчета.
Метод замкнутых векторных контуров. Каждая замкнутая кинематическая цепь может быть представлена в виде расчетной модели, представляющей собой один или несколько замкнутых многоугольников (контуров), построенных на векторах, совпадающих по длине и направлению с отрезками, соединяющими точки, связанные с элементами различных кинематических пар. При таком представлении следует иметь в виду, что не все возможные замкнутые контуры, которые можно составить для конкретной кинематической цепи (механизма) будут независимыми. Это означает, что некоторые из них могут быть образованы путем различных комбинаций с векторами других контуров. Следовательно, число замкнутых векторных контуров расчетной модели кинематической цепи должно быть таким, чтобы координаты векторов, входящих в них, однозначно определялись как функции независимых обобщенных координат цепи. В качестве примера рассмотрим механизм, представленный на рисунке 5. Для данного механизма возможны несколько замкнутых контуров, например:
С целью формализовать вывод уравнений связей механизма, векторы системы (10) будем представлять в виде комплексных чисел, которые можно рассматривать как аналоги векторов при графическом изображении на плоскости, тогда:
Рисунок 5 - Механизм сбалансированного манипулятора и его векторная модель
С учетом выражений (11) система (10) примет следующий вид:
Приравняв коэффициенты при действительных и мнимых частях комплексных уравнений системы (12), получим систему четырех нелинейных уравнений связей механизма с четырьмя неизвестными обобщенными координатами
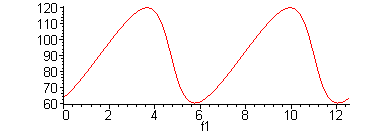
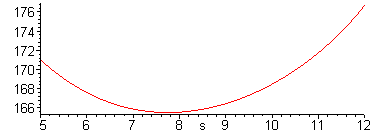
Процесс вывода системы уравнений связей механизма (13) и ее аналитическое решение достаточно эффективно реализуются в системе Maple V, что иллюстрируется следующей программой: > restart; Подпрограмма: действительная часть комплексного числа > Rez: =proc(z, i): subs(i=0, z); RETURN(%) end: Подпрограмма: мнимая часть комплексного числа > Imz: =proc(z, i): subs(i=1, z)-Rez(z, i); RETURN(%) end: Комплексные уравнения замкнутых контуров > eq1: =z0-z4+z3: eq2: =z4n-z5-z0-z2: Комплексные числа, образующие замкнутые контуры > z0: =s+i*r: z2: =l2*(cos(f2)+i*sin(f2)): z3: =l3*(cos(f3)+i*sin(f3)): > z4: =l4*(cos(f4)+i*sin(f4)): z4n: =l4n*(cos(f4)+i*sin(f4)): > z5: =l5*(cos(f5)+i*sin(f5)): Система нелинейных уравнений связей механизма > eq01: =Rez(eq1, i); eq02: =simplify(Imz(eq1, i)); > eq03: =Rez(eq2, i); eq04: =simplify(Imz(eq2, i)); Распечатка выведенной системы уравнений связей eq01: = s - l4 cos(f4) + l3 cos(f3) eq02: = r - l4 sin(f4) + l3 sin(f3) eq03: = l4n cos(f4) - l5 cos(f5) - s - l2 cos(f2) eq04: = l4n sin(f4) - l5 sin(f5) - r - l2 sin(f2) Размеры звеньев механизма r: =4: l2: =6: l3: =8: l4: =6: l4n: =12: l5: =8: Решение системы нелинейных уравнений связей > res: = solve({eq01, eq02, eq03, eq04}, {f2, f3, f4, f5}): assign(res); Графическое представление обобщенных координат
f2=f2(s) f3=f3(s)
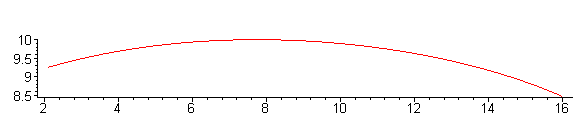
Выведенные зависимости могут быть использованы для определения траекторий движения характерных точек звеньев механизма, например: декартовы координаты точки > xc: =l4n*cos(f4)+l5*cos(Pi+f5): > yc: =l4n*sin(f4)+l5*sin(Pi+f5): Траектория движения точки > plot ( [xc, yc, s=12..5] ); При более детальном анализе в программах следует предусматривать отделение решений системы уравнений связей типа (13), соответствующих рассматриваемому варианту сборки механизма, определение области изменения независимой обобщенной координаты при заданных размерах звеньев, выяснение возможности механизма в некоторых положениях приобретать избыточную подвижность и т.д. 1.3. Кинематические передаточные функции механизмов. Функцией положения механизма (кинематической передаточной функцией нулевого порядка) называется функциональная зависимость обобщенной координаты выходного звена от независимых обобщенных координат входных звеньев, заданная в явном или неявном виде: где Функция положения механизма является его собственной (геометрической) характеристикой, не зависящей явно от времени, позволяющая при заданных значениях каждой из независимых обобщенных координат из областей их возможного изменения, однозначно определить обобщенную координату выходного звена. Для механизмов со степенью подвижности, равной 1, функция положения приобретает следующий вид:
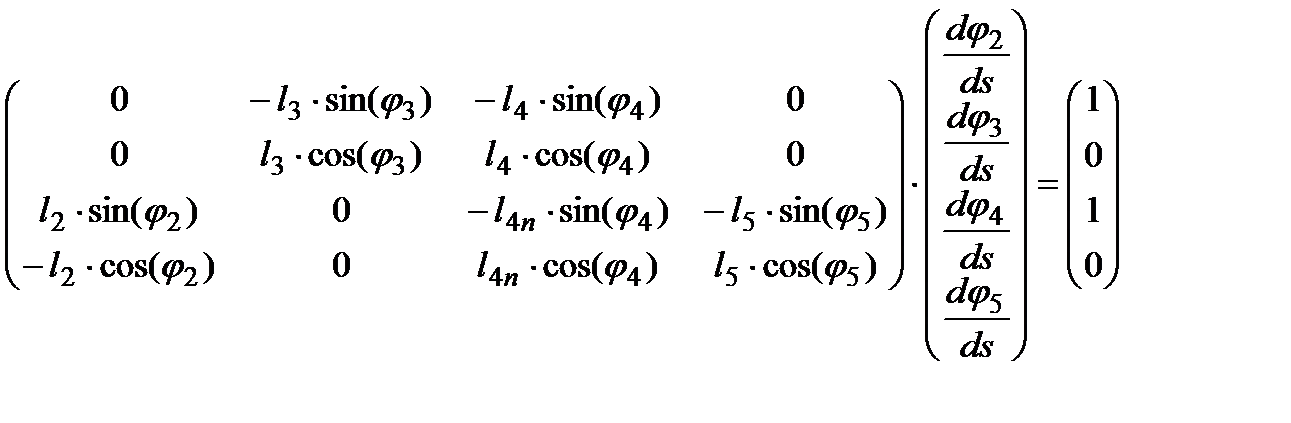
Кинематической передаточной функцией первого порядка для механизма со степенью подвижности, равной 1, называется первая производная функции положения по независимой обобщенной координате. Кинематической передаточной функцией второго порядка для механизма со степенью подвижности, равной 1, называется вторая производная функции положения по независимой обобщенной координате[12]. Как и функция положения, кинематические передаточные функции первого и второго порядков явно не зависят от времени. Как было показано выше, функция положения механизма зависит от связей, ограничивающих движения его звеньев и может быть определена из решения системы уравнений связей. Предположим, что такая функция определена и имеет вид: Таким образом, функция положения и кинематические передаточные функции первого и второго порядка позволяют иметь полную информацию о кинематике механизма при различных законах движения входных звеньев. Они могут быть получены двумя способами: непосредственным дифференцированием функции положения или из решения системы линейных алгебраических уравнений, получаемой в результате дифференцирования системы уравнений связей механизма по независимой обобщенной координате. Так, дифференцируя систему (13) по
или в матричной форме:
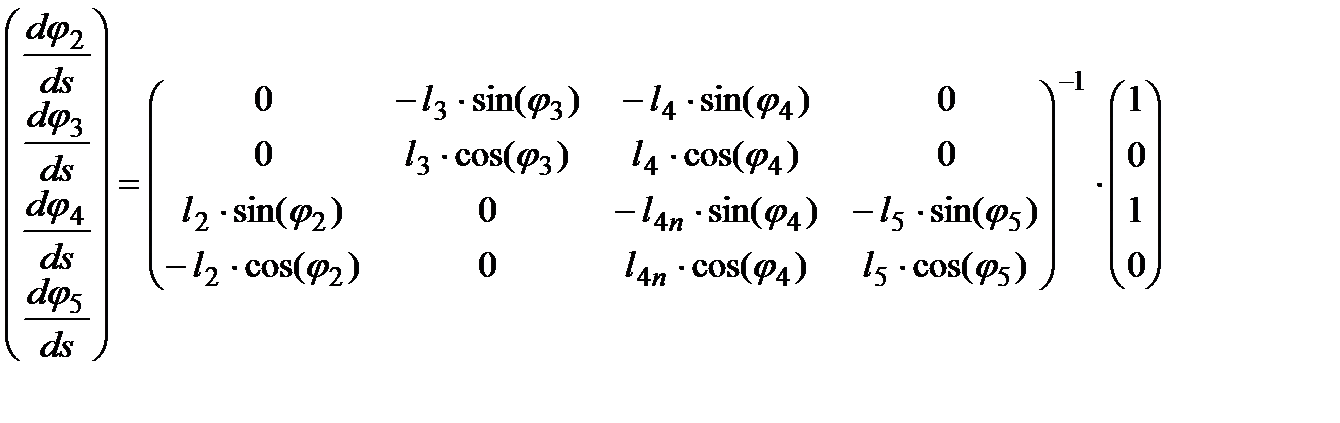
Очевидно:
или:
Решение системы (15) единственно, если определитель матрицы коэффициентов
Теперь, например, при Из этого следует, что при Система линейных алгебраических уравнений для определения кинематических передаточных функций второго порядка имеет такую же матрицу коэффициентов, как и система (14), в чем можно легко убедиться продифференцировав ее по независимой обобщенной координате Популярное:
|
Последнее изменение этой страницы: 2016-08-31; Просмотров: 862; Нарушение авторского права страницы
 , принадлежащего звену 1 в системе координат
, принадлежащего звену 1 в системе координат  -
-  ; однородная матрица преобразования системы координат
; однородная матрица преобразования системы координат  -
- 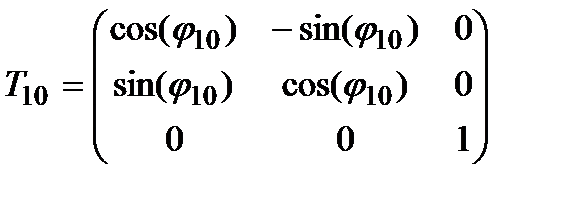 ; тогда, однородные координаты центра этого элемента кинематической пары в системе координат
; тогда, однородные координаты центра этого элемента кинематической пары в системе координат  , (7)
, (7) - длина звена 1,
- длина звена 1,  - угол поворота системы координат
- угол поворота системы координат  относительно
относительно  ,
,  , (8)
, (8) - расстояние по оси ординат межу кинематическими парами
- расстояние по оси ординат межу кинематическими парами  и
и  ;
;  - переменная величина, равная расстоянию между кинематическими парами
- переменная величина, равная расстоянию между кинематическими парами  и
и  - угол поворота системы координат
- угол поворота системы координат  относительно
относительно 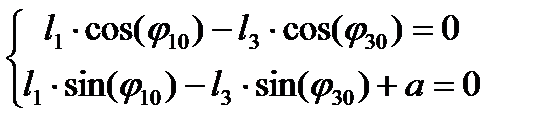 . (9)
. (9) м и
м и  м относительно обобщенных координат
м относительно обобщенных координат  и
и  с представлением результатов в графической форме.
с представлением результатов в графической форме.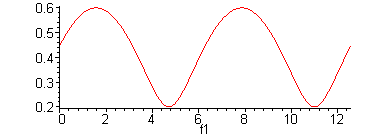
 и т.д. Первые три контура являются зависимыми, т.к. каждый из них может быть представлен в виде комбинации векторов двух других, а последний - предполагает введение дополнительной обобщенной координаты и, поэтому, является нерациональным. Таким образом, представим модель механизма в виде двух независимых контуров:
и т.д. Первые три контура являются зависимыми, т.к. каждый из них может быть представлен в виде комбинации векторов двух других, а последний - предполагает введение дополнительной обобщенной координаты и, поэтому, является нерациональным. Таким образом, представим модель механизма в виде двух независимых контуров:  и
и  , что позволяет записать систему двух векторных уравнений:
, что позволяет записать систему двух векторных уравнений: 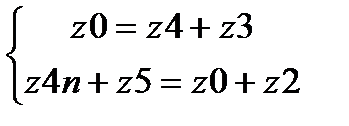 . (10)
. (10)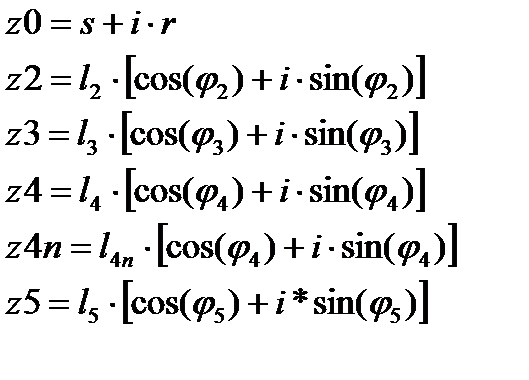 . (11)
. (11)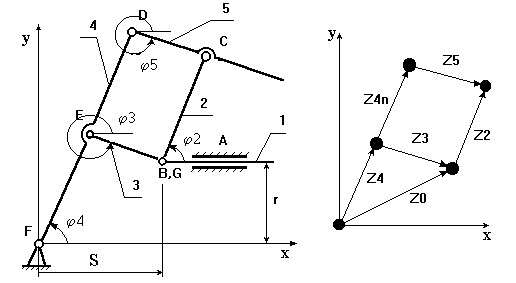
 . (12)
. (12) (переменная
(переменная  - независимая обобщенная координата):
- независимая обобщенная координата): 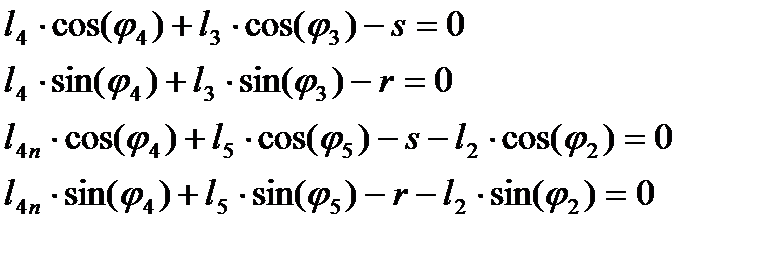 . (13)
. (13) и
и  как функций независимой обобщенной координаты
как функций независимой обобщенной координаты 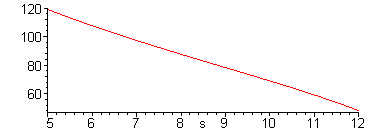
 :
: 
 :
: 
 или
или  ,
,  - число независимых обобщенных координат (степень подвижности механизма);
- число независимых обобщенных координат (степень подвижности механизма);  - номер одного из выходных звеньев механизма.
- номер одного из выходных звеньев механизма. или
или  . (14)
. (14) , тогда:
, тогда:  - кинематическая передаточная функция первого порядка;
- кинематическая передаточная функция первого порядка;  - кинематическая передаточная функция второго порядка. Но,
- кинематическая передаточная функция второго порядка. Но,  и
и  , следовательно:
, следовательно:  - обобщенная скорость выходного звена;
- обобщенная скорость выходного звена;  - обобщенное ускорение выходного звена.
- обобщенное ускорение выходного звена. , получим:
, получим: 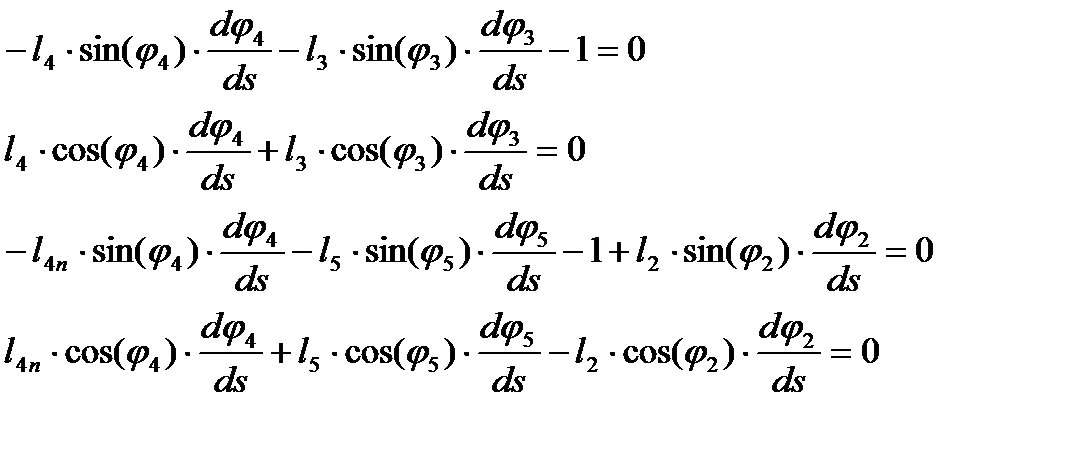 (14)
(14) .
.
 ,
,  . (15)
. (15) отличен от нуля, в противном случае возможны два варианта: либо система имеет бесконечное множество решений, либо не имеет их вообще. Это означает, что при некоторых значениях независимой обобщенной координаты механизм приобретает дополнительные подвижности и его движение неоднозначно или он вообще не существует. В рассматриваемом примере имеем:
отличен от нуля, в противном случае возможны два варианта: либо система имеет бесконечное множество решений, либо не имеет их вообще. Это означает, что при некоторых значениях независимой обобщенной координаты механизм приобретает дополнительные подвижности и его движение неоднозначно или он вообще не существует. В рассматриваемом примере имеем:  . (16)
. (16) и
и  [13], получим:
[13], получим:  .
. , т.е., когда шатун 3 совпадет по направлению с коромыслом 4 - механизм мгновенно приобретает дополнительную подвижность и движения его звеньев однозначно не определяются заданием значения независимой обобщенной координаты
, т.е., когда шатун 3 совпадет по направлению с коромыслом 4 - механизм мгновенно приобретает дополнительную подвижность и движения его звеньев однозначно не определяются заданием значения независимой обобщенной координаты