
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ПОРЯДОК ВЫПОЛНЕНИЯ ЛАБОРАТОРНОЙ РАБОТЫ
Вариант кинематической схемы механизма и закон движения входного звена в форме 2.1. Изобразить кинематическую схему механизма с указанием на ней размеров звеньев в предварительно выбранном масштабе. 2.2. Исследовать структуру механизма, характер движения звеньев относительно стойки и определить его класс. 2.3. Обосновать выбор наиболее приемлемого метода анализа. 2.4. Составить расчетную схему механизма, с указанием на ней абсолютной системы координат, связанной со стойкой, обобщенных координат механизма, декартовых координат характерных точек звеньев. При необходимости привести кинематические схемы открытых кинематических цепей, получаемых при размыкании кинематических пар или векторную модель механизма. 2.5. Составить алгоритм программы кинематического анализа механизма, написать и отладить программу, в которой предусмотреть следующее: - вывод на печать графиков функции положения и кинематических передаточных функций первого и второго порядков; - вывод на печать графиков изменения обобщенной скорости и обобщенного ускорения выходного звена при заданном законе движения входного звена; - вывод на печать траектории одной из характерных точек звеньев механизма (такая точка выбирается по указанию преподавателя). Язык программирования или математический пакет для реализации программы кинематического анализа выбирается студентом самостоятельно. По результатам анализа сделать выводы. ПРИМЕР ВЫПОЛНЕНИЯ ЛАБОРАТОРНОЙ РАБОТЫ Цель работы: - изучить методику кинематического анализа плоских рычажных механизмов. - освоить основы программирования задач кинематического анализа механизмов. Кинематическая схема механизма: Данный механизм относится к механизмам третьего класса и его структурная формула следующая: I(1)< == III(2, 3, 4, 5). Программа кинематического анализа плоского рычажного механизма. > restart; Ввод значений кинематических параметров механизма > l1: =25: l2: =60: l3: =124: l4s: =138: l42s: =49: a: =95: b: =55: > c: =18: l4: =l4s+l42s: Процедуры для выделения действительной и мнимой частей комплексного числа > real_z: =proc(z, i) local c: c: =subs(i=0, z): RETURN(%) end: > imeg_z: =proc(z, i): subs(i=1, z-real_z(z, i)): RETURN(%) end: Механизм, выполняемый по заданной кинематической схеме может относиться и к механизмам второго класса, например, в тех случаях, когда входными звеньями являются звено 5 (ползун) или звено 3 (коромысло). Тогда группа звеньев (1, 2 ) может считаться условно пассивной и ее положение полностью определяется положением кинематической пары В при заданном положении кинематической пары С (3, 4) или Е (5, 0).Если входным считать звено 5 из уравнения замкнутости контура DCE могут быть определены зависимости xc=f(s) и yc=g(s) а, затем, исходя из деления отрезка ЕСв заданном отношении xb=f1(s) и yb=g1(s). При этом s условно будет считаться независимой обобщенной координатой. Итак: Контур 1 заданный в системе координат с началом в точке D: z1 - вектор, направленный от точки D к точке C; z0 - вектор, направленный от точки D к точке E; z4 -вектор, направленный от точки E к точке C; > z1: =xc+i*yc: z0: =s+a-i*(b-c): z4: =l4*(cos(f4)+i*sin(f4)): > eq0: =z1-z0-z4; eq1: =real_z(eq0, i); eq2: =simplify(imeg_z(eq0, i)); eq0: = xc + i yc - s - 95 + 37 i - 187 cos(f4) - 187 i sin(f4) eq1: = xc - 95 - s - 187 cos(f4) eq2: = yc + 37 - 187 sin(f4) > eq_1: =subs(cos(f4)=0, eq1): eq_2: =subs(sin(f4)=0, eq2): > eq_11: =eq_1^2+eq_2^2-l4^2: eq_22: =xc^2+yc^2-l3^2: > res: =solve({eq_11, eq_22}, {xc, yc}): assign(res); > cos(f4): =solve(eq1, cos(f4)): sin(f4): =solve(eq2, sin(f4)): Определение координат точки В (по методу деления отрезка в данном отношении): > lambda: =l4s/l42s: l4: =l4s+l42s: > xb: =(s+a+lambda*xc)/(1+lambda): > yb: =(c-b+lambda*yc)/(1+lambda): Определенные выше функции координат и тригонометрических функций угла f4 не распечатываются ввиду их громоздкости.В системе координат с началом в точке Оэти функции определятся следующим образом: Переход к новой системе координат с началом в точке О > xc0: =xc-a: yc0: =yc+b: xb0: =xb-a: yb0: =yb+b: Координаты точки А связаны с координатами точки Всоотношением z2: > z2: =(xb0-xa0)^2+(yb0-ya0)^2-l2^2: Разрешая z2 относительно s, получим: > s: =solve(z2, s): Представим теперь координаты xa0 и ya0 как функции независимой обобщенной координаты f1 и построим график функции положения механизма (кинематической передаточной функции механизма нулевого порядка): > xa0: =l1*cos(f1): ya0: =l1*sin(f1): plot(s, f1=0..4*Pi);
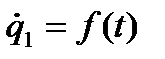
Закон движения входного звена:
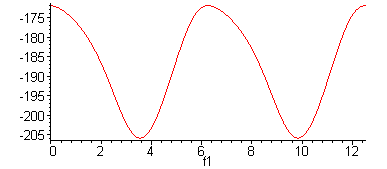
Определим зависимость угла поворота кривошипа 1 как функцию времени с учетом постоянной интегрирования, которая определяется исходя из следующих начальных условий движения: при t=0 ==> f1=0. > f10: =int(omega1, t): c1: =eval(-subs(t=0, f10)): f1: =f10+c1; f1: = 5 t - 1/10 cos(20 t) + 1/10 График зависимости s=f1(t): > s5: =s: plot(s5, t=0..2); График зависимостиv=f2(t): > ds5: =ds*omega1: plot(ds5, t=0..2);
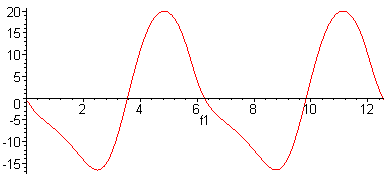
График зависимости a=f3(t): > a5: =d2s*omega1^2+ds*epsilon1: plot(a5, t=0..2);
Построение траектории точки В: > xbb: =array(1..11): ybb: =array(1..11): > for i from 1 to 10 do ybb[i]: =evalf(subs(f1=2*Pi*(i-1)/10, yb0)) od; > for i from 1 to 10 do xbb[i]: =evalf(subs(f1=2*Pi*(i-1)/10, xb0)) od; > f: =interp(xbb, ybb, aa): plot(f, x=-78..-33);
Выводы. При заданных размерах звеньев осуществляется полнооборотное движение кривошипа. Максимальное перемещение ползуна Шатун 4 совершает движение, при котором траектории точек: КОНТРОЛЬНЫЕ ВОПРОСЫ 4.1. Различия между структурной и кинематической схемами механизма. 4.2. Обобщенные координаты механизма и декартовы координаты его характерных точек. Зависимые и независимые обобщенные координаты. 4.3. Основные задачи кинематического анализа механизмов. 4.4. Уравнения связей механизма. 4.5. Отличия в методах кинематического анализа открытых и замкнутых кинематических цепей. 4.6. Кинематические передаточные функции механизма. 4.7. Условие существования полнооборотного движения кривошипа. Кинематический синтез механизмов. 4.8. Многозначность функции положения, определяемой из системы уравнений связей механизма. Варианты сборки механизма. РЕКОМЕНДУЕМАЯ ЛИТЕРАТУРА. 5.1.Левитский Н.И. Теория механизмов и машин: Учеб. пособие для вузов.-2-е изд., перераб. и доп.-М.: Наука. Гл. ред. физ.-мат. лит., 1990.- 592 с. 5.2. Дьяконов В.П. Математическая система Maple V R3 / R4 / R5. М.: " Солон", 1998. – 400 с. 5.3. B.Monagan, K.O.Geddes, K.M. Heal, G.Labahn, S.M.Vorkoetter. Maple V Realise 5. Programming Guide. Springer.- 1998.- 380 p.
ЛАБОРАТОРНАЯ РАБОТА №8 Тема работы: Определение параметров зубьев цилиндрического зубчатого колеса Цель работы: - приобретение практических навыков определения параметров зубьев с эвольвентным профилем с помощью штангенциркуля и штангензубомера; Популярное:
|
Последнее изменение этой страницы: 2016-08-31; Просмотров: 387; Нарушение авторского права страницы
 задается преподавателем.
задается преподавателем.

 .
.




 мм.
мм. - прямая, параллельная оси
- прямая, параллельная оси  ;
;  - окружность с центром в точке
- окружность с центром в точке  ,
,  - плоская кривая.
- плоская кривая.