
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Теория автоматического управления
Теория автоматического управления Часть 2 Методические указания к выполнению курсового проекта Электронная версия Составители: доц, каф. АТПП Башарин И.А. доц, каф. АТПП Кожевников Е.А.
Факультет технологий и автоматизации управления в машиностроении Специальность 220301.65 - автоматизация технологических процессов и производств (в машиностроении) Специализация 220301.65.33 - компьютерные системы управления в производстве и в бизнесе
Санкт-Петербург Теория автоматического управления. Методические указания к курсовому проектированию. – Спб., СПГУ, 2012.
Методические указания предназначены для студентов специальности 220301.65, изучающих дисциплину «Теория автоматического управления» Пособие содержит техническое задание на проектирование, краткие методические указания к выполнению каждого раздела, краткий справочный материал с указанием адресов для расширенного поиска, методические указания к проведению исследования спроектированной системы методом моделирования в среде МВТУ.
Составители: Башарин И.А. канд. техн. наук. доц., Кожевников Е.А. канд. техн. наук. доц..
1. Техническое задание
Произвести проектирование системы управления следящим электроприводом постоянного тока. Данные для расчетов взять из таблицы 1. В процессе проектирования необходимо выполнить расчеты и выбор элементов силовой части привода, обратных связей и регуляторов и определить настройки последних; составить структурную и принципиальную схемы системы и ее математическое описание. С помощью логарифмических амплитудных частотных характеристик определить тип регулятора положения и его параметры. Методом моделирования провести исследование точности слежения и динамических свойств, спроектированной системы.
Исходные данные В таблице 1а и 1б приведены исходные данные для проектирования. Вариант исходных данных для ТΣ 2, Qмах, ω мах, tпп выбираются по 2 последним цифрам шифра. Если они больше 22, то по последней цифре. М’c max по номеру в списке группы. Таблица 1а
Таблица 1б
Общие для всех вариантов данные. Коэффициент соотношения масс для четных номеров γ =2, для нечетных γ =2.5. Максимальное ускорение ε max=0.5. На риc. 1 приведена структурная схема следящего электропривода, для которого необходимо определить структуру и параметры регулятора положения, выяснить пределы изменения его коэффициента передачи, удовлетворяющие требованиям задания.
Рис. 1 Функциональная схема следящего привода
В схеме приняты следующие обозначения: РП, РС, РТ –соответственно регулятор положения; ТП – тиристорный преобразователь; ЯЦ – якорная цепь двигателя; ЭМЗ – якорная цепь двигателя; РЕД – редуктор; ДП, ДС, ДТ – соответственно датчик положения, скорости и тока. Выбор силовых элементов следящей системы Выбор электродвигателя Выбор двигателя осуществляется исходя из технического задания на проектирование ЭМС по ряду параметров. Произведем их расчет. Расчет требуемой мощности электродвигателя можно ориентировочно выполнить по формуле КЗ = 1.2 -: - 2.5 – коэффициент, учитывающий требование к динамическим характеристикам электропривода (меньшему времени переходного процесса соответствует большее значение коэффициента). При расчетах предварительное значение КЗ выбрать 1.7…1.8. Тип двигателя выбирается из Таблицы 2. Все двигатели имеют две пары полюсов. Из условия согласования двигателя и объекта управления по угловой скорости определяется передаточное число редуктора: i = ω н / ω max (1) где ω н - номинальная угловая скорость двигателя ω н=2π nн/60
где J∑ = Jм + J1 = γ J1 - суммарный момент инерции кинематической передачи; J1 = Jд + Jр - моменты инерции двигателя Jд и редуктора Jр (момент инерции первой массы); Jм = J1( γ – 1) - приведенный момент инерции механизма (момент инерции второй массы); Мc max = M’c max / i η p - приведенный момент сопротивления нагрузки; Мтр = 0.1Мдн – момент сухого трения; Мдн - номинальный момент двигателя; η р = 0.9…..0.94 – КПД редуктора. Момент инерции редуктора ориентировочно принять Jр = 0.1 Jд.
Таблица 2
Выбранный электродвигатель должен удовлетворять условиям: Мэ < Мдн и Мmax/Мдн < kм, (3) где Мmax – максимальный момент сопротивления нагрузки, приведенный к валу двигателя Мmax = J∑ i ε max + Мс max + Мтр; kм - коэффициент перегрузки двигателя по пусковому моменту, который определяется из технических данных двигателя kм =Мmax дв/Mдн дв. Значение kм приведено в табл. 2. Если условие (3) не выполняется, то необходимо выбрать двигатель большей мощности. В следящем электроприводе при выборе двигателя необходимо проверять его соответствие оптимальному передаточному числу редуктора, определяемому из условия минимума эквивалентного момента dMэ / di = 0:
Если фактическое передаточное число редуктора, определяемое по (1), отличается от оптимального числа более чем на 30%, то необходимо выбрать другой двигатель такой же мощности, но с иной номинальной угловой скоростью. В данном (учебном ) проекте следует только констатировать факт необходимости выбора другого двигателя, дальнейшие же расчеты продолжить с выбранным двигателем. Активное сопротивление якорной цепи двигателя необходимо принимать в нагретом состоянии Rд = Rд 20оС (1 + α дΔ tо), где α д =0.004 Ом/град - температурный коэффициент обмоток двигателя; Δ tо = tро -20о ( tро - расчетная температура нагрева обмоток двигателя). Индуктивность якорной (роторной) обмотки двигателя можно определить на основе его паспортных данных Lд = Tд Rд (4)
где IЯН – номинальный ток якорной обмотки; pn - число пар полюсов; kК - коэффициент компенсации (при наличии компенсационной обмотки kК = 0.25…0.3. Выбор преобразователя
Выбор преобразователя производится из условий:
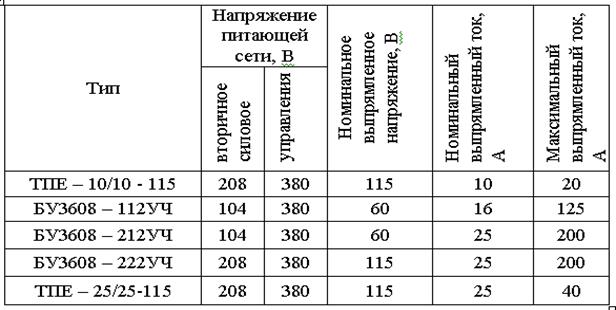
Данные тиристорных преобразователей в таблице 3.
Таблица 3
Если преобразователь питается от 3-х фазной сети, соответствующей напряжению питания преобразователя, то понижающий (повышающий) трансформатор не применяем. В противном случае необходимо выбрать трансформатор. Выбор трансформатора При выборе трансформатора необходимо учитывать, что линейное напряжение вторичной обмотки его должно отвечать условию:
где Uвн – номинальное выпрямленное напряжение ТП Требуемая мощность трансформатора для трехфазной мостовой схемы:
Технические данные некоторых трансформаторов приведены в Таблице 4
Таблица 4
Определим сопротивление фазы трансформатора. Активную составляющую R трф по потерям короткого замыкания Δ Рк.
где I2н – номинальный фазный ток вторичной обмотки I2н=Ртр/(3U2ф). Полное сопротивление фазы можно определить из соотношения:
где е2к – напряжение короткого замыкания При расчетах с достаточной степенью точности можно принять:
Тогда реактивная составляющая может быть определена из соотношения:
Индуктивность фазы трансформатора, приведенная ко вторичной обмотке
где f – частота питающей сети. Далее определим индуктивность Lуп : Lуп =Lтр =2 Lтр ф Активное сопротивление Rуп силовой цепи преобразователя: Rуп= Rтр + Rдт + Rк, где Rтр=2Rтр ф; Rдт – динамическое сопротивление тиристора; Rк – коммутационноесопротивление выпрямительной схемы ТП. Rдт =(0.2…0, 3)Uтq/Iт, где Uт=(0, 5…1) – падение напряжения на тиристоре; Iт = Idн/3 – среднее значение тока тиристора; Idн – номинальное значение среднего выпрямленного тока; q – число одновременно проводящих тиристоров ( принять q=2). Rк= тfLa – коммутационное сопротивление выпрямительной схемы, где m – число пульсаций выпрямленного напряжения за период питающей сети; La =Lтр ф Выбор дросселя
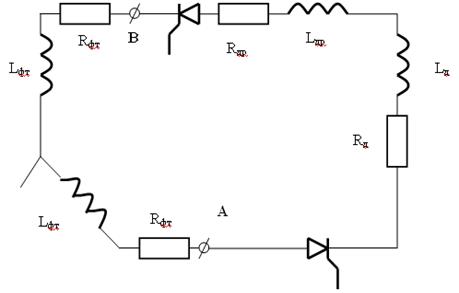
В рабочем режиме тиристорного преобразователя при скорости двигателя большей минимально допустимой открытыми оказываются не менее двух тиристоров. Тогда для трехфазной мостовой схемы текущее состояние цепи якоря можно представить в виде:
Рис. 2 Текущее мгновенное состояние цепи якоря двигателя.
где ее – относительная величина первой гармоники выпрямленного напряжения (дл следящего привода ее=0, 24); Еd0 – максимальная выпрямленная ЕДС ТП (Еd0 =кеЕ2ф), ке – коэффициент схемы выпрямления для 3 фазной мостовой ке=2, 34; ω 1 – частота пульсаций ω 1=2π fm; ie – относительная величина эффективного значения первой гармоники выпрямленного тока ( принять 0, 05).
где - дросселя; Lд- индуктивность якоря двигателя, Lяц - индуктивность якорной цепи. Дроссель выбирают по величине Lдр, а также по его номинальному току. Например дроссели ДФ-7 существуют на токи от 20 до 250 А и индуктивность их имеет значения 10, 15, 20 мГ и далее через 10 до 100 мГ. Индуктивность выбираемого дросселя должна быть больше или равной расчетной. После выбора следует вычислить окончательное значение индуктивности: Lяц= Lдр+ Lд+Lуп, где для расчета используют уже выбранное значение индуктивности. Преобразователя
При воспроизведении входного воздействия, в общем случае, вероятности того или иного знака скорости вращения двигателя равны. Вследствие чего можно утверждать, что наиболее вероятным рабочим участком тиристорного преобразователя (ТП) будет участок симметричный относительно Етп=0. Известно, что Етп=Еd0Cos (α ), при этом α определятся из регулировочной характеристики ТП. Например, для регулировочной характеристики ТП вида
Статическая характеристика ТП при любой регулировочной характеристике может быть приведена к такому виду. Например, для регулировочной характеристики вида Рис. 23 Приведение регулировочной характеристики к стандартному виду
Рис. 24 Схема включения операционного усилителя Из схемы следует, что: Uу= UртR0/R1+ UопR0/R2. Из схемы следует, что: Uу= UртR0/R1+ UопR0/R2 Будем считать, что Uоп=10 В. Тогда для трех точек характеристики рис. 23а будем иметь три уравнения:
из которых следует, что
Содержание 1. Техническое задание Выбор электродвигателя Выбор преобразователя Выбор трансформатора Выбор дросселя Преобразователя Теория автоматического управления Часть 2 Методические указания к выполнению курсового проекта Электронная версия Составители: доц, каф. АТПП Башарин И.А. доц, каф. АТПП Кожевников Е.А.
Факультет технологий и автоматизации управления в машиностроении Специальность 220301.65 - автоматизация технологических процессов и производств (в машиностроении) Специализация 220301.65.33 - компьютерные системы управления в производстве и в бизнесе
Санкт-Петербург Популярное:
|
Последнее изменение этой страницы: 2016-08-31; Просмотров: 390; Нарушение авторского права страницы


 Для проверки выбранного двигателя определим эквивалентный момент:
Для проверки выбранного двигателя определим эквивалентный момент: 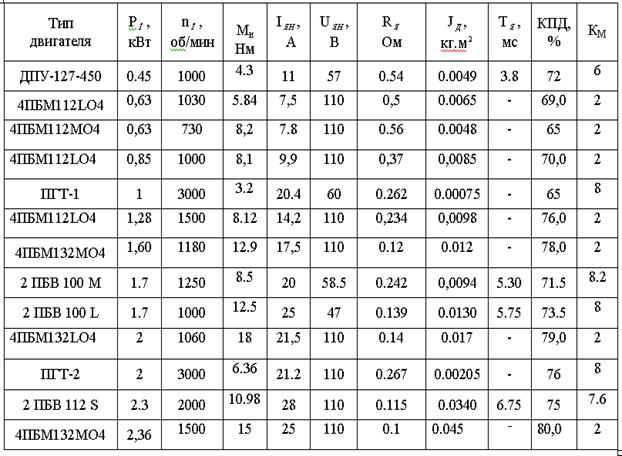

 или приближенно по формуле Линвиля – Уманского
или приближенно по формуле Линвиля – Уманского







 Сглаживающий дроссель. При работе двигателя для сглаживания пульсаций напряжения в цепи якоря, как правило, суммарной индуктивности двигателя и трансформатора недостаточно. По этой причине в цепь якоря двигателя дополнительно включают индуктивность (дроссель), требуемую величину которой определяют по условию допустимых пульсаций машины:
Сглаживающий дроссель. При работе двигателя для сглаживания пульсаций напряжения в цепи якоря, как правило, суммарной индуктивности двигателя и трансформатора недостаточно. По этой причине в цепь якоря двигателя дополнительно включают индуктивность (дроссель), требуемую величину которой определяют по условию допустимых пульсаций машины:  В этом случае требуемая величина индуктивности определяется из соотношения:
В этом случае требуемая величина индуктивности определяется из соотношения:  статическая характеристика примет вид, изображенный на рис. 22
статическая характеристика примет вид, изображенный на рис. 22
 , статическая характеристика приобретает вид, изображенный на рис. 23a. Однако, на входе регулятора тока напряжение в реверсивных приводах ( а таковым в следящих системах является контур скорости) меняется в пределах ±10 В. При этом напряжение на выходе должно изменятся также в пределах ±10 В. То есть при использовании ТП с такой регулировочной характеристикой необходимо согласовать вход и выход. Этого можно достигнуть установив перед ТП операционный усилитель по схеме, изображенной на рис 24.
, статическая характеристика приобретает вид, изображенный на рис. 23a. Однако, на входе регулятора тока напряжение в реверсивных приводах ( а таковым в следящих системах является контур скорости) меняется в пределах ±10 В. При этом напряжение на выходе должно изменятся также в пределах ±10 В. То есть при использовании ТП с такой регулировочной характеристикой необходимо согласовать вход и выход. Этого можно достигнуть установив перед ТП операционный усилитель по схеме, изображенной на рис 24.



 , то есть можно принять R0=3 Ком, Ron=10 Ком.
, то есть можно принять R0=3 Ком, Ron=10 Ком.