
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Скорость, ускорение и энергия колеблющегося тела.
Вернемся к формулам для смещения x, скорости v и ускорения a гармонического колебательного процесса. Пусть имеем тело массы «m», которое совершает под действием квазиупругой силы колебания по закону:
Видно, что скорость и ускорение также изменяются по гармоническому закону (графики приводились ранее) с периодом колебаний равным T. Из сравнения формул видно, что скорости v опережает смещение по фазе на Для ускорения зависимость иная. В каждый момент времени ускорение пропорционально смещению и находится с ним в противофазе. Это означает, что когда x=xmax, то ускорение тоже максимально, но отрицательно, т.е. при x=xmax, Квазиупругая сила, под действием которой происходит колебательное движение, является консервативной. Поэтому полная энергия гармонического колебательного движения должна оставаться постоянной. В процессе колебаний происходит превращение кинетической энергии в потенциальную и обратно (силами сопротивления пренебрегаем). Причем в моменты наибольшего отклонения о положения равновесия Определим, как со временем изменяется Ек и Uп для гармонического колебания
Т.к.
т.е. Используя формулы тригонометрии, можно получить выражения для
Здесь E – полная энергия системы. Из формул видно, что Ек и Uп изменяются с частотой 2w0, т.е. с частотой вдвое превышающей частоту гармонического колебания. Среднее значение квадрата sin и квадрата cos равно 1/2. Следовательно, среднее значение Eк совпадает со средним значением Uп и равно E/2.
Гармонический осциллятор. Систему, описываемую уравнением
Следовательно, гармонический осциллятор представляет собой систему, которая совершает гармонические колебания около положения равновесия. Для гармонического осциллятора справедливы все результаты, полученные ранее для гармонического колебания. Рассмотрим и обсудим ещё дополнительно к ним два вопроса. Найдем импульс гармонического осциллятора. Продифференцируем выражение
В каждом положении, характеризуемом отклонением “x”, осциллятор имеет некоторое значение ”p”. Чтобы найти ”p” как функцию ”x”, нужно исключить ”t” из написанных для ”p” и ”x” уравнений, Представим эти уравнения в виде:
Возведя эти выражения в квадрат и складывая, получим:
Найдем теперь площадь эллипса
Здесь Следовательно,
Таким образом, полная энергия гармонического осциллятора пропорциональна площади эллипса, причем коэффициентом пропорциональности служит собственная частота осциллятора. 8.6. Малые колебания системы вблизи положения равновесия. Рассмотрим произвольную механическую систему, положение которой может быть задано с помощью одной величины “x”. Величиной ”x”, определяющей положение системы может быть угол, отсчитываемый от некоторой плоскости или расстояние, отсчитываемое вдоль заданной кривой. Потенциальная энергия такой системы будет функцией одной переменной ”x”: Ep=Ep(x). Выберем начало отсчета таким образом, чтобы в положении равновесия x=0. Тогда функция Ep(x) будет иметь минимум при x=0. Далее разложим функцию Ep(x) в ряд по степеням “x”, причем ограничимся случаем малых колебаний, поэтому высшими степенями “x” можно пренебречь. По формуле Маклорена:
(ввиду малости “x” остальными членами пренебрегаем) Так как Ep(x) при x=0 имеет минимум, то Это выражение идентично с выражением для потенциальной энергии системы, в которой действует квазиупругая сила (константу “b” можно положить равной 0). Сила, действующая на систему, может быть определена по формуле: Итак, потенциальная энергия системы при малых отклонениях от положения равновесия оказывается квадратичной функцией смещения, а сила, действующая на систему, имеет вид квазиупругой силы. Следовательно, при малых отклонениях от положения равновесия любая механическая система будет совершать колебания, близкие к гармоническим. 8.7. Математический маятник. ОПРЕДЕЛЕНИЕ: математическим маятником будем называть идеализированную систему, состоящую из невесомой и нерастяжимой нити, на которой подвешена масса, сосредоточенная в одной точке. Отклонение маятника от положения равновесия будет характеризоваться углом j (рис. 8.7). При отклонении маятника от положения равновесия возникает вращательный момент Следовательно,
Рассмотрим малые колебания (
Решением этого уравнения будет функция Следовательно, при малых колебаниях угловое отклонение математического маятника изменяется по гармоническому закону. Как следует из формулы
Физический маятник.
При отклонении маятника от положения равновесия на угол j возникает вращательный момент, стремящийся вернуть маятник в положение равновесия (рис. 8.8). Этот момент равен
где m – масса маятника; l – расстояние от точки подвеса «О» до центра инерции маятника «С». Обозначим J – момент инерции маятника относительно оси, проходящей через точку подвеса, тогда
где Период колебаний физического маятника будет определяться выражением:
Сопоставляя это выражение с периодом колебаний математического маятника ОПРЕДЕЛЕНИЕ: Приведенная длина физического маятника – это длина такого математического маятника, период колебаний которого совпадает с периодом колебаний данного физического маятника.
Затухающие колебания. При выводе уравнения гармонических колебаний считалось, что колеблющаяся точка находится под действием только квазиупругой силы. Во всякой реальной колебательной системе всегда имеются силы сопротивления (например, это может быть сила трения в точке подвеса, сопротивление среды, в которой совершаются колебания). Действие этих сил приводит к тому, что энергия колеблющейся системы (или точки) будет непрерывно убывать. Эта убыль энергии будет равна работе против сил трения и сопротивления. Т.к. полная энергия колебаний пропорциональна квадрату амплитуды Итак, затухание колебаний в любой колебательной системе (механической, электрической и т.п.) обусловлено потерями энергии в этой системе. Потери энергии колебаний в механических колебательных системах происходят из-за трения (внешнего и внутреннего) и излучения упругих волн в окружающую среду; в электрических – из-за наличия активного сопротивления проводников и т.п. Рассмотрим свободные (или собственные) колебания. Это значит, что система, будучи выведена из положения равновесия в результате внешнего воздействия, в дальнейшем предоставлена самой себе и находится под воздействием только квазиупругой силы F=-kx и силы сопротивления среды, значит она будет совершать затухающие колебания вдоль оси “x”. Ограничимся рассмотрением малых колебаний, тогда и скорость (v) системы будет малой, а при небольших скоростях сила сопротивления пропорциональна скорости:
где r – коэффициент сопротивления среды. Знак минус (“-”), т.к. Под действием сил F и f тело приобретает ускорение “a”, и для колеблющегося тела уравнение II-закона Ньютона имеет вид:
Обозначим
Здесь w0 – та частота, с которой совершались бы свободные колебания системы при отсутствии сопротивления среды (т.е. при r = 0). Эта частота называется собственной частотой колебаний системы. b – коэффициент затухания колебаний (зависит от свойств данной системы и среды). Наличие сопротивления среды приводит к тому, что амплитуда колебаний со временем будет уменьшаться. Поэтому будем искать решение уравнения (8.15) в виде:
где a(t) – некоторая функция времени. Продифференцируем это выражение по времени и найдем
После подстановки этих выражений в уравнение (8.15) и несложных преобразований придем к следующему соотношению:
Для того чтобы уравнение удовлетворялось при любых значения “t”, необходимо равенство нулю коэффициентов при “sin” и ”cos”. Т.е. приходим к двум следующим уравнениям:
Первое уравнение представим в виде:
После интегрирования получим
Отсюда При w0 > b, величина w будет вещественной и тогда решение дифференциального уравнения
Таким образом, при не слишком большом затухании
График этой функции показан на рисунке 8.9. Пунктирными линиями показаны пределы, в которых находится смещение колеблющейся точки. Движение такой системы можно рассматривать как гармоническое колебание с частотой w и амплитудой, изменяющееся по закону Скорость затухания колебаний определяется величиной Следовательно, коэффициент затухания равен обратной величине того промежутка времени, за который амплитуда колебаний уменьшается в “e” раз. С учетом того, что
При незначительном сопротивлении среды Для характеристики колебательной системы (а именно: убывания амплитуды колебаний в зависимости от числа колебаний) вводится величина, называемая логарифмическим декрементом затухания (l). Отношение значений амплитуд, соответствующих моментам времени, отличающимся на период равно
Следовательно, логарифмический декремент затухания равен обратной Для характеристики колебательной системы также часто употребляется величина Как известно, энергия колеблющейся системы пропорциональна квадрату амплитуды. Поэтому энергия системы при затухающих колебаниях убывает со временем по закону
где E0 – значение энергии при t = 0. Продифференцировав это выражение по “t”, получим скорость возрастания энергии
Изменив знак на обратный, найдем скорость убывания энергии: Если энергия мало изменяется за время равное периоду колебаний, то убыль энергии за период будет равна С учетом Из формулы для периода колебаний И последнее, математический анализ показывает, что при условии Популярное:
|
Последнее изменение этой страницы: 2017-03-11; Просмотров: 836; Нарушение авторского права страницы
 , тогда
, тогда .
. .
. . Это означает, что если x=0, то v тела имеет максимальное значение
. Это означает, что если x=0, то v тела имеет максимальное значение  .
. (графики приведены ранее).
(графики приведены ранее). , причем
, причем  ; при прохождении положения равновесия
; при прохождении положения равновесия  , причем
, причем  . Так как
. Так как  , то
, то  .
. . Имеем
. Имеем (8.4)
(8.4) (8.5)
(8.5) ,
,  как и должно было быть, т.к. квазиупругая сила – консервативная сила.
как и должно было быть, т.к. квазиупругая сила – консервативная сила.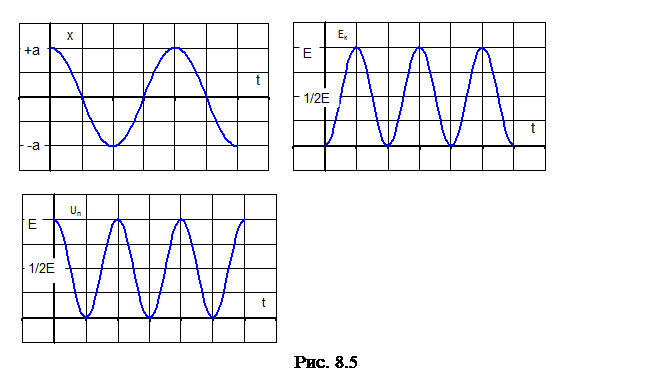
 (8.6)
(8.6) (8.7)
(8.7) , где
, где 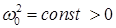 , будем называть гармоническим осциллятором. Решение этого уравнения, как известно, имеет вид:
, будем называть гармоническим осциллятором. Решение этого уравнения, как известно, имеет вид:  по t и, умножив полученный результат на массу осциллятора, получим:
по t и, умножив полученный результат на массу осциллятора, получим:  . (8.8)
. (8.8)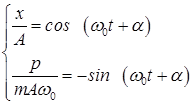 (8.9)
(8.9) . (8.10)
. (8.10)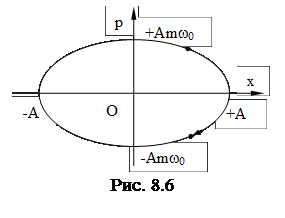 Нарисуем график, показывающий зависимость ”p” импульса гармонического осциллятора от отклонения ”x” (рис. 8.6). Координатную плоскость (”p”, ”x”) принято называть фазовой плоскостью, а соответствующий график – фазовой траекторией. Фазовая траектория гармонического осциллятора представляет собой эллипс с полуосями “A” и ”A·m·w0”. Каждая точка фазовой траектории изображает состояние осциллятора для некоторого момента времени (т.е. его отклонение и импульс). С течением времени точка, изображающая состояние, перемещается по фазовой траектории, совершая за период колебания полный обход. Причем это перемещение совершается по часовой стрелке [а именно, если в некоторый момент времени t¢ x=A, p=0, то в следующий момент времени ”x” будет уменьшаться, а ”p” принимать все возрастающие по модулю отрицательные значения, т.е. движение изобразительной точки (т.е. точки изображающей состояние) будет происходить по часовой стрелке].
Нарисуем график, показывающий зависимость ”p” импульса гармонического осциллятора от отклонения ”x” (рис. 8.6). Координатную плоскость (”p”, ”x”) принято называть фазовой плоскостью, а соответствующий график – фазовой траекторией. Фазовая траектория гармонического осциллятора представляет собой эллипс с полуосями “A” и ”A·m·w0”. Каждая точка фазовой траектории изображает состояние осциллятора для некоторого момента времени (т.е. его отклонение и импульс). С течением времени точка, изображающая состояние, перемещается по фазовой траектории, совершая за период колебания полный обход. Причем это перемещение совершается по часовой стрелке [а именно, если в некоторый момент времени t¢ x=A, p=0, то в следующий момент времени ”x” будет уменьшаться, а ”p” принимать все возрастающие по модулю отрицательные значения, т.е. движение изобразительной точки (т.е. точки изображающей состояние) будет происходить по часовой стрелке]. . Или
. Или .
. , где n0 – собственная частота осциллятора, являющаяся для данного осциллятора величиной постоянной.
, где n0 – собственная частота осциллятора, являющаяся для данного осциллятора величиной постоянной. . Откуда
. Откуда . (8.11)
. (8.11) .
. , а
, а  . Обозначим Ep(x) = b и
. Обозначим Ep(x) = b и  , тогда
, тогда  .
. . Получено с учетом, что работа совершается за счет убыли потенциальной энергии
. Получено с учетом, что работа совершается за счет убыли потенциальной энергии  .
. , он имеет такое направление, что стремится вернуть маятник в положение равновесия, поэтому моменту M и угловому смещению j нужно приписать разные знаки.
, он имеет такое направление, что стремится вернуть маятник в положение равновесия, поэтому моменту M и угловому смещению j нужно приписать разные знаки. . (8.12)
. (8.12)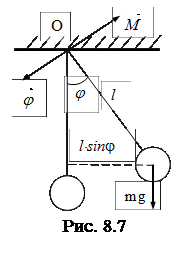 Напишем теперь для маятника уравнение динамики вращательного движения (учитывая, что b – угловое ускорение равно
Напишем теперь для маятника уравнение динамики вращательного движения (учитывая, что b – угловое ускорение равно  , а
, а  ).
).
 ) и введем величину
) и введем величину  , тогда получим
, тогда получим

 получим
получим . (8.13)
. (8.13)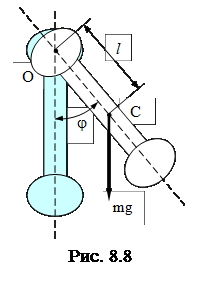 ОПРЕДЕЛЕНИЕ: Физическим маятником будем называть твердое тело, способное совершать колебания вокруг неподвижной оси, не проходящей (не совпадающей) через его центр инерции.
ОПРЕДЕЛЕНИЕ: Физическим маятником будем называть твердое тело, способное совершать колебания вокруг неподвижной оси, не проходящей (не совпадающей) через его центр инерции. . В случае малых колебаний получим уравнение
. В случае малых колебаний получим уравнение ,
,  . Отсюда следует, что при малых отклонениях от положения равновесия физический маятник совершает гармонические колебания, частота которых зависит от массы маятника, момента инерции маятника относительно оси вращения и расстояния между осью вращения и центром инерции маятника.
. Отсюда следует, что при малых отклонениях от положения равновесия физический маятник совершает гармонические колебания, частота которых зависит от массы маятника, момента инерции маятника относительно оси вращения и расстояния между осью вращения и центром инерции маятника. . (8.14)
. (8.14) получаем, что математический маятник с длиной
получаем, что математический маятник с длиной  будет иметь такой период колебаний, как и данный физический маятник. Эта величина называется приведенной длиной физического маятника.
будет иметь такой период колебаний, как и данный физический маятник. Эта величина называется приведенной длиной физического маятника. , то наличие сил трения и сопротивления приведет и к непрерывному убыванию амплитуды колебаний. Если убыль энергии не восполняется за счет работы внешних сил, то колебания будут затухать (и носят название затухающих).
, то наличие сил трения и сопротивления приведет и к непрерывному убыванию амплитуды колебаний. Если убыль энергии не восполняется за счет работы внешних сил, то колебания будут затухать (и носят название затухающих). ,
,  и
и  имеют противоположные направления.
имеют противоположные направления. или
или  .
. ;
;  , тогда
, тогда

 и
и  :
: 

 .
.

 или
или  .
. , где
, где  – постоянная интегрирования. После потенцирования найденного выражения получим
– постоянная интегрирования. После потенцирования найденного выражения получим  . Видно, что
. Видно, что  , а
, а  . Подставим эти значения в (8.17), получим
. Подставим эти значения в (8.17), получим .
. .
. может быть представлено в виде
может быть представлено в виде колебания описываются функцией
колебания описываются функцией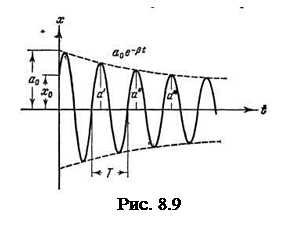
 .
. Верхняя из пунктирных кривых дает график функции a(t), причем величина a0 представляет собой амплитуду в начальный момент времени. Начальное смещение x0 зависит, кроме a0, также от начальной фазы a:
Верхняя из пунктирных кривых дает график функции a(t), причем величина a0 представляет собой амплитуду в начальный момент времени. Начальное смещение x0 зависит, кроме a0, также от начальной фазы a:  .
. , которую называют коэффициентом затухания. Найдем время t, за которое амплитуда колебаний уменьшается в “e” раз. По определению
, которую называют коэффициентом затухания. Найдем время t, за которое амплитуда колебаний уменьшается в “e” раз. По определению  .
. , а
, а  период затухающих колебаний можно определить как
период затухающих колебаний можно определить как .
. период колебаний практически равен
период колебаний практически равен  . С ростом коэффициента затухания период колебаний увеличивается.
. С ростом коэффициента затухания период колебаний увеличивается.
 , т.е.
, т.е.  . Т.к.
. Т.к.  . Отсюда следует, что логарифмический декремент затухания l зависит от свойств данной системы и среды.
. Отсюда следует, что логарифмический декремент затухания l зависит от свойств данной системы и среды. Выразим
Выразим  и запишем закон убывания амплитуды в виде
и запишем закон убывания амплитуды в виде  . За время t, за которое амплитуда колебаний уменьшится в “e” раз система совершит
. За время t, за которое амплитуда колебаний уменьшится в “e” раз система совершит  колебаний. Из условия
колебаний. Из условия  получаем
получаем  . Поэтому
. Поэтому  .
. величине числа колебаний, совершаемых системой за то время, за которое амплитуда уменьшается в “e” раз (l – безразмерная величина).
величине числа колебаний, совершаемых системой за то время, за которое амплитуда уменьшается в “e” раз (l – безразмерная величина). , называемая добротностью колебательной системы. Как видно из определения, добротность пропорциональна числу колебаний N, совершаемых системой за время t, за которое амплитуда колебаний убывает в “e” раз.
, называемая добротностью колебательной системы. Как видно из определения, добротность пропорциональна числу колебаний N, совершаемых системой за время t, за которое амплитуда колебаний убывает в “e” раз. ,
,  .
. .
. .
. и
и  , т.е. при слабом затухании колебаний добротность с точностью до множителя 2p равна отношению энергии, запасенной в системе в данный момент, к убыли этой энергии за один период колебаний.
, т.е. при слабом затухании колебаний добротность с точностью до множителя 2p равна отношению энергии, запасенной в системе в данный момент, к убыли этой энергии за один период колебаний. движение носит апериодический (непериодический) характер – выведенная из положения равновесия система возвращается в положение равновесия, не совершая колебаний.
движение носит апериодический (непериодический) характер – выведенная из положения равновесия система возвращается в положение равновесия, не совершая колебаний.