|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Процедуры захода на посадку c использованием системы GPS
Примечание: Если необходимые параметры работы GPS не обеспечиваются (WAAS, RAIM и т.д.), некоторые опубликованные процедуры захода на посадку для аэропорта прибытия, могут быть недоступны в перечне имеющихся процедур захода на посадку.
Только одна процедура захода на посадку может быть загружена в текущий план полета. Если введена новая процедура захода на посадку, при существующей предыдущей процедуре захода на посадку, новая процедура автоматически заменяет предыдущую. Маршрут захода определяется выбором процедуры захода на посадку и транзитными точками. Выбранная процедура захода на посадку, предлагается в двух вариантах использования «Load» или «Active». При использовании опции «Load» выбранная процедура загружается в конец активного плана полета после процедуры прибытия без немедленного использования её для целей навигации. Это позволяет продолжать навигацию через промежуточные точки маршрута согласно активного плана полета, а также сохраняет выбранную процедуру на странице Active Flight Plan Page для немедленной активации по мере необходимости. При использовании опции «Activate» выбранная процедура загружается в конец плана полета, и немедленно начинается навигация в напрвлении первой точки загруженной процедуры захода на посадку.
Если при выборе процедуры захода на посадку, справа от заголовка выбранной процедуры отображается обозначение «GPS», это означает, что выполнение данной процедуры захода на посадку обеспечивается при помощи приемника GPS. Не все процедуры захода на посадку имеют данное обозначение, подразумевая, что приемник GPS может быть использован только в целях дополнительного навигационного средства. Если приемник GPS не используется в качестве основного навигационного средства, тогда при выполнении процедуры захода на посадку, необходимо использовать соответствующий навигационный приемник при выполнении выбранной процедуры захода на посадку (VOR, ILS, NDB). Например, конечный участок захода на посадку по маякам ILS, должен выполняться путем настройки приемника NAV на соответствующую частоту курсового маяка ILS, и выбора данного навигационного источника на указателе CDI.
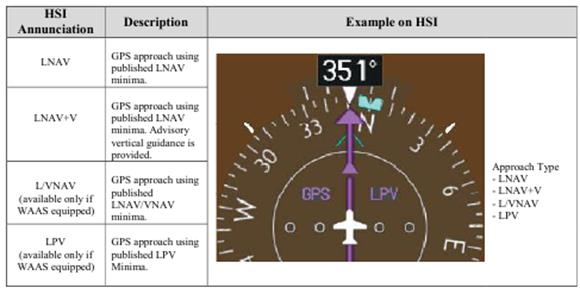
G1000 WAAS GPS позволяет выполнять процедуры захода на посадку типа: LNAV, LNAV/VNAV, LPV в соответствии с опубликованными схемами (картами) данных процедур. Процедура захода на посадку типа LNAV+V соответствует стандартной процедуре захода на посадку LNAV с консультативным вертикальным профилем наведения, обеспечивающим помощь пилоту в выдерживании постоянного вертикального профиля снижения, схожего по своему назначению с вертикальным профилем снижения, формирующимся глиссадным маяком ILS.
Этот режим вертикального наведения отображается в системе G1000 на PFD в том же самом месте, как и указатель глиссады ILS, только в виде ромба сиреневого (magenta) цвета. Указатель типа активного режима захода на посадку отображается на HSI, как показано в таблице.
6.8.4 Загрузка и просмотр процедуры захода на посадку в активный план полета. ЗАГРУЗКА: 1. Нажмите клавишу PROC. Откроется окно Procedures Window. 2. Выберите «SELECT APPROACH». 3. Нажмите клавишу ENT. Откроется страница Arrival Loading Page.
4. Выберите желаемую процедуру захода на посадку из имеющихся процедур и нажмите клавишу ENT. 5. Выберите транзитную точку (если необходимо) и нажмите клавишу ENT. 6. Барометрический минимум: а) для установки «MINIMUMS» поверните маленькую ручку FMS для выбора «BARO» и нажмите клавишу ENT. Поверните маленькую ручку FMS для установки необходимой высоты и нажмите клавишу ENT. или: b) для пропуска установки значения высоты минимума нажмите клавишу ENT.
7. Подсветится «LOAD? ». Нажмите клавишу ENT для загрузки процедуры в активный план полета; или поверните большую ручку FMS для выбора «ACTIVATE» и нажмите клавишу ENT для загрузки и активации процедуры захода на посадку в плане полета.
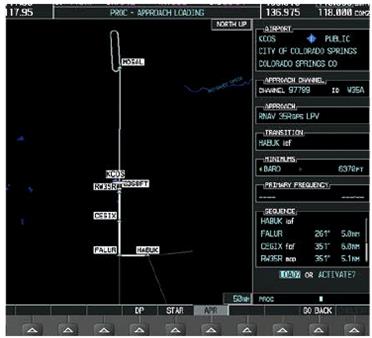
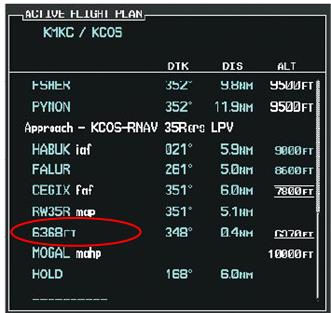
Маршрутный план полета с загруженной процедурой посадки с указанием системы захода.
Примечание: Когда приемник GPS не должен использоваться, для выбранной процедуры захода на посадку, на конечном участке захода на посадку, отображается сообщение «NOT APPROVED FOR GPS». GPS приемник обеспечивает наведение до начальной точки процедуры захода на посадку, но указатель HSI должен быть подключен к приемнику NAV, в отношении которого выполняется конечный участок выбранной процедуры захода на посадку.
ПРОСМОТР 1. Откройте страницу Airport Information Page (первая страница группы WPT). Нажмите клавишу APR. Откроется страница Approach Information Page, отображающая по умолчанию данные аэропорта представленного на странице Airport Information Page. 2. Для выбора нужного аэропорта, нажмите кнопку FMS для активации курсора, введите идентификатор аэродрома прибытия и нажмите клавишу ENT. Первая процедура захода на посадку будет представлена на карте. 3. Нажмите кнопку FMS, затем поверните большую ручку FMS для перемещения курсора в поле Approach. 4. Поверните маленькую ручку FMS для открытия перечня имеющихся процедур захода на посадку. Вращением большой ручки FMS выберите необходимую процедуру прибытия и нажмите клавишу ENT. Курсор установится в окно TRANSITION. Процедура вылета отобразится на карте. 5. Поверните маленькую ручку FMS для просмотра точек Transition, для выбранной процедуры захода на посадку. Выберите необходимую точку Transition и нажмите клавишу ENT. Курсор переместится в окно Sequence. Процедура прибытия отобразится на карте. 6. Нажмите клавишу INFO для возврата на страницу Airport Information Page. со страницы Nearest Airport Page:
1. Выберите страницу Nearest Airport Page. 2. Нажмите кнопку FMS, поверните большую ручку FMS для перемещения курсора в поле желаемого для выбора аэродрома. Район выбранного аэродрома отобразится на карте. 3. Нажмите клавишу APR; или нажмите клавишу MENU, выберите «Select Approach Window» и нажмите клавишу ENT. 4. Поверните большую ручку FMS для выбора желаемой процедуры захода на посадку. 5. Нажмите клавишу LD APR; или нажмите клавишу MENU, выберите «Load Approach» и нажмите клавишу ENT. Откроется страница Approach Loading Page с курсором расположенным в поле Transition. 6. Поверните большую ручку FMS для выбора желаемой точки Transition и нажмите клавишу ENT. 7. Барометрический минимум: а) для установки «MINIMUMS» поверните маленькую ручку FMS для выбора «BARO» и нажмите клавишу ENT. Поверните маленькую ручку FMS для установки необходимой высоты и нажмите клавишу ENT. или: b) для пропуска установки значения высоты минимума нажмите клавишу ENT. 8. Подсветится «LOAD? ». Нажмите клавишу ENT для загрузки процедуры в активный план полета; или поверните большую ручку FMS для выбора «ACTIVATE» и нажмите клавишу ENT для загрузки и активации процедуры захода на посадку в плане полета. Система G1000 продолжает навигацию согласно текущего плана полета до момента активации процедуры захода на посадку.
При необходимости моментальной активации процедуры захода на посадку в период полета необходимо: 1. Нажмите клавишу PROC. Откроется Procedures Window с курсором в поле «Activate Approach». 2. Нажмите клавишу ENT для активации предварительно загруженной процедуры
Во многих случаях, предварительная загрузка всей процедуры прибытия в течение времени полета до аэродрома назначения, облегчает работу пилота при полете в районе аэродрома. В случае векторения службой ОВД, для вывода ВС на посадочный курс, постарайтесь использовать данное время для ввода информации с выбором опции «Activate Vector-To-Final», который позволяет системе G1000 определить трек следования к точке FAF.
Для этого необходимо: 1. Нажмите клавишу PROC. Откроется Procedures Window. 2. Выберите «Activate Vector-To-Final» и нажмите клавишу ENT.
6.8.6 Удаление процедуры захода на посадку из активного плана полета:
1. Нажмите клавишу FPL для отображения Active Flight Plan Page на MFD или Active Flight Plan Window на PFD. 2. Нажмите клавишу MENU и выберите «Remove Approach». 3. Нажмите клавишу ENT. Откроется окно подтверждения с указанной процедурой захода на посадку. 4. Выберите «ОК» и нажмите клавишу ENT. Для отмены подтверждения выберите «CANCEL» и нажмите клавишу ENT. или: 1. Нажмите клавишу FPL для отображения Active Flight Plan Page на MFD или Active Flight Plan Window на PFD. 2. Нажмите кнопку FMS и переместите курсор в поле заголовка процедуры захода на посадку активного плана полета. 3. Нажмите клавишу CLR. Откроется окно подтверждения с указанной процедурой. 4. Выберите «ОК» и нажмите клавишу ENT. Для отмены подтверждения выберите «CANCEL» и нажмите клавишу ENT. 5. Нажмите кнопку FMS для удаления мигающего курсора.
6.8.7 Процедура ухода на повторный заход.
Активация процедуры ухода на повторный заход в активном плане полета:
1. Нажмите клавишу PROC. 2. Выберите «ACTIVATE MISSED APPROACH». 3. Нажмите клавишу ENT. Самолет автоматически начнет движение в установленной процедурой последовательности к точке MAHP (Missed Approach Holding Point).
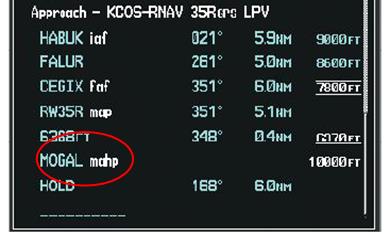
В процедуре ухода на повторный заход, высота, следующая за MAP (Missed Approach Point – точка ухода на повторный заход), в данном примере 6368ft, не является частью опубликованной процедуры. Это участок, называемый Course to Altitude (CA), обеспечивает наведение ВС вдоль оси ВПП до достижения заданной высоты, необходимой для безопасного выполнения первого разворота в направлении MAHP (Missed Approach Hold Point). В этом случае, если высота ВС ниже заданной высоты (6368ft), после пересечения точки MAP, устанавливается навигация Direct-to, для обеспечения выдерживания трека ВПП до достижения высоты 6368ft. После достижения 6368ft навигация Direct-to устанавливается в направлении опубликованной MAHP (в нашем случае MOGAL). Если высота полета ВС после пролета МАР, выше опубликованной высоты, навигация Direct-to устанавливается в направлении опубликованной точки (в нашем случае MOGAL) для выполнения Missed Approach Procedure (процедуры ухода на повторный заход). Высота ограничения начала разворота в направлении точки MAHP устанавливается по умолчанию 400 футов (120 метров) AGL, когда участок Course to Altitude не указывается в опубликованной процедуре. В некоторых Missed Approach Procedures участок Course to Altitude может быть частью опубликованной процедуры. Например, процедура трактует набирать 5500 футов, затем разворот влево и следовать к mahp. В этом случае эта высота будет обозначена в перечне точек процедуры как «5500ft». Следовательно снова, если высота ВС меньше чем обозначенная высота, навигация Direct-to устанавливается на участке Course to Altitude, на которой (5500ft) Missed Approach Procedure активируется.
Пример действия пилота при уходе на повторный заход 1. Нажать переключатель GA на высоте принятия решения, установить максимальный режим мощности для выполнения процедуры ухода на второй круг. Командные стрелки пилотажного командного прибора укажут на необходимость перехода в режим набора высота. Внимание: П ри нажатии на кнопку GA активируется режим ухода на второй круг, и автопилот отключается, на что указывает желтое мигающее в течение 5 секунд сообщение ‘ AP ’, а также звуковое предупреждение о выключении автопилота.
2. Приступите к набору высоты на высоту, предписанную в опубликованной процедуре ухода на второй круг (в данном случае на 10 000 футов). a) Нажмите на клавишу AP, чтобы включить автопилот. b) При процедуре захода на посадку ILS, нажмите на сенсорную клавишу CDI, чтобы выбрать GPS в качестве источника навигационной информации. c) Нажмите на клавишу NAV, чтобы автопилот вел самолет в зону ожидания.
3.С помощью ручки ALT установите выбранную высоту зоны ожидания. Для удерживания текущей воздушной скорости во время набора высоты нажмите на клавишу FLC.
При приближении воздушного судна к выбранной высоте пилотажный командный прибор переходит в режим захвата выбранной высоты, на что указывает зеленая индикация ‘ATLS’, мигающая в течение 10 секунд.
Зеленая индикация ‘ALT’ мигает в течение 10 секунд, когда расстояние до выбранной высоты становится 50 футов; автопилот переходит в режим удерживания высоты и выравнивает воздушное судно.
4. После активации режима ухода на второй круг автопилот выполняет полет в зоне ожидания. В окне состояния навигации (Navigation Status box) над окном состоянии AFCS (АБСУ) отображаются информационные сообщения.
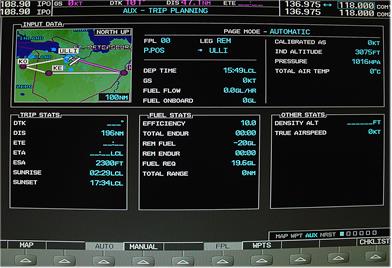
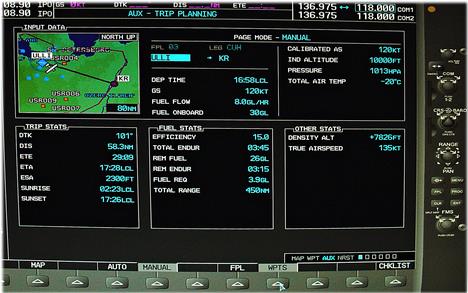
Раздел 7. Просмотр информации о запланированном рейсе. (TRIP PLANNING)
Система G1000 позволяет пилоту просмотреть расчетную планируемую информацию о рейсе, топливную информацию и другую информацию для определенного плана полета или участка плана полета на основе автоматически ( AUTO) или вручную (MANUAL) вводимых данных c помощью ручки FMS режимов полета, запаса или остатка топлива и т.д. Основываясь на данных топливного датчика или в активном плане полета (по расчетному остатку топлива) возможно определение полетного веса ВС.
Все вводимые данные, необходимые для расчетов и отображения полученных результатов, вводятся на странице Trip Planning Page, находящейся в группе страниц AUX. Некоторая дополнительные объяснения источников некоторых входных данных, представлены ниже: 1. Время вылета (DEP TIME) – по умолчанию устанавливается текущее время системы G1000 в режиме Automatic Page Mode. Расчеты производятся с текущего местоположения самолета, т.к. ВС уже находится в полете. 2. Calibrated airspeed (CALIBRATED AS) – основным источником является система воздушных сигналов (ADC); вторичным источником информации является путевая скорость определяемая приемником GPS. 3. Indicated Altitude (IND ALTITUDE) – основным и вторичным источником информации о барометрической высоте является приемник GPS.
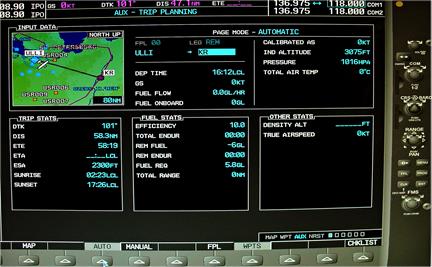
Статистические расчетные данные рассчитываются, основываясь на выборе точки начала и окончания расчета, и входных данных для выполнения расчетов. В режиме расчета Flight Plan Mode (FPL) по выбранному архивному плану полета (NN) и выбранному всему плану полета (CUM) начальной и конечной точкой выполняемого расчета являются точки выбранного плана полета.
В режиме расчета Flight Plan Mode (FPL) по выбранному архивному плану полета (NN) и выбранному участку плана полета (NN) начальной и конечной точкой выполняемого расчета являются точки выбранного участка плана полета. В режиме расчета Flight Plan Mode (FPL) по выбранному активному плану полета (00) и оставшемуся плану полета (REM) начальной (from) и конечной точкой (to) выполняемого расчета являются соответственно точки текущего местоположения ВС и конечной точкой активного плана полета.
В режиме расчета Flight Plan Mode (FPL) по выбранному активному плану полета (00) и выбранном участке плана полета (NN) начальной (from) и конечной точкой (to) выполняемого расчета являются соответственно точки текущего местоположения ВС и конечной точкой выбранного участка плана полета.
В режиме расчета WPTS вручную выбираются необходимые для расчета точки (если имеется активный план полета, по умолчанию устанавливаются начальная и конечная точки плана полета). Некоторые расчетные статистические данные обозначаются черточками, когда выбранный участок активного плана полета уже пройден. Desire Track (DTK) – обозначается nnnо и представляет собой заданный путевой угол между выбранными точками. Distance (DIS) – расстояние отображаемое в десятых долях выбранных единиц измерения до значения 99.9 и в целых единицах измерения расстояния до 9999. Estimated Time Enroute (ETE) – расчетное время полета указывается в часах: минутах до значения меньше одного часа, далее указывается в значении минуты: секунды. Estimate Time of Arrival (ETA) – расчетное время прибытия указывается в часах: минутах: - в режиме расчета WPTS, ETA определяется путем добавления ETE к времени вылета; - если выбранный план полета не является активным, тогда ETA определяется путем добавления ко времени вылета всех ETEs всех выбранных для расчета участков плана полета. Если для расчета выбран весь архивный план полета, тогда ETA рассчитывается для всего плана полета. - если для расчета выбран активный план полета, тогда ETA отражает текущее местоположение ВС (по времени) и текущий участок полета. В этом случае ETA рассчитывается путем добавления текущего времени ETEs текущего участка плана полета вплоть до последнего, включенного в расчет, участка активного плана полета. Если в расчет включен весь активный план полета, тогда ETA рассчитывается для всего плана полета. Enroute Safe Altitude (ESA) – безопасная высота полета по маршруту, отображается nnnnnFT. Destination Sunrise and Sunset Times (SUNRISE, SUNSET) – время восхода и захода солнца, отображается в часах: минутах.
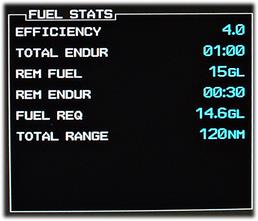
Топливная статистика.
Расчет топливной статистики основывается на выбранных начальной и конечной точках и исходных данных для выполнения расчета. Некоторые из расчетных статистических данных отображаются черточками, когда выбранный участок активного плана полета уже пройден. Fuel efficiency (EFFICIENCY) – топливная эффективность; этот параметр определяется путем деления текущей путевой скорости на текущий расход топлива. Time of fuel endurance (TOTAL ENDUR) – отображается в часах: минутах. Этот параметр получается путем деления общего количества топлива на борту ВС на текущий расход топлива. Fuel on board upon reaching end of selected leg (REM FUEL) – остаток топлива на борту ВС по достижению окончания выбранного участка, определяется путем вычитания необходимого расчетного топлива из общего запаса топлива. Fuel endurance remaining at end of selected leg (REM ENDUR) – остаток топлива на борту ВС в часах: минутах по достижению окончания выбранного участка; определяется путем вычитания необходимого расчетного топлива в часах: минутах из общего запаса топлива в часах: минутах. Fuel required for trip (FUEL REQ) – оставшееся топлива для полета; рассчитывается путем умножения оставшегося времени на текущий расход топлива. Total range at entered fuel flow (TOTAL RANGE) – общее оставшееся расстояние в зависимости от введенного запаса топлива: рассчитывается путем умножения значения времени оставшегося запаса топлива на путевую скорость. |
Последнее изменение этой страницы: 2017-03-15; Просмотров: 1302; Нарушение авторского права страницы