
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Исполнительные механизмы. Их виды.Стр 1 из 24Следующая ⇒
Билет 1 Исполнительные механизмы. Их виды. Исполнительный механизм (ИМ)– устройство для преобразования управляющей информации в механическое перемещение с располагаемой мощностью, достаточной для воздействия на объект управления. Исполнительные механизмы. Исполнительные механизмы (ИМ) являются одними из последних звеньев систем автоматического регулирования и управления и обычно предназначены для управления регулирующими органами, непосредственно воздействующими на режимы работы объектов управления. Регулирующими органами могут быть различного рода дроссельные заслонки, клапаны, задвижки, шиберы, направляющие аппараты и другие элементы, способные производить изменение количества энергии или рабочего вещества, поступающего в объект управления. При этом перемещение рабочих органов может быть как поступательным, так и вращательным в пределах одного или нескольких оборотов. Наиболее часто регулирующий орган является неотъемлемой частью самого ИМ и рассматривается как единое вместе с ним устройство. В других случаях регулирующий орган установлен на объекте управления и является его составной частью. Виды: электродвигательные исполнительные механизмы, Электромагнитные исполнительные механизмы, Релейные исполнительные механизмы, Электромагнитные релейные исполнительные механизмы. Расположение ИМ в общей функциональной схеме аналоговой системы управления по отклонению показано на рис. 2.5.
Рис. 2.5.
В общем случае ИМ состоит из совокупности следующих элементов: исполнительного двигателя – источника силового воздействия на рабочий орган; передаточного или преобразовательного устройства - предназначенного для получения определенной скорости, направления и характера перемещения рабочего органа, располагающегося между исполнительным двигателем и рабочим органом; конечных выключателей - ограничивающих перемещения рабочего органа и фиксирующих его крайние положения в схемах управления и автоматического регулирования; элементов управления (пускателей, реле, золотников, клапанов и др.), защиты (предохранительных и переливных клапанов, муфт ограничения крутящего момента и др.), сигнализации и контроля (дистанционных указателей положения и др.). Принято различать ИМ по следующим признакам: 1. По виду математического описания: а) линейные; б) нелинейные. 2. По виду сигналов: а) непрерывные; б) релейные; в) вибрационные. 3. По виду используемой энергии: а) электрические; б) пневматические; в) гидравлические; г) комбинированные. Следует отметить, что к ИМ обычно предъявляются весьма жесткие требования, т.к. условия эксплуатации управляемых производственных объектов зачастую далеки от идеальных (широкие пределы изменения влажности и температуры, наличие примесей, пыли, агрессивных газов, воздействие резко переменных нагрузок, вибраций и т. п.).
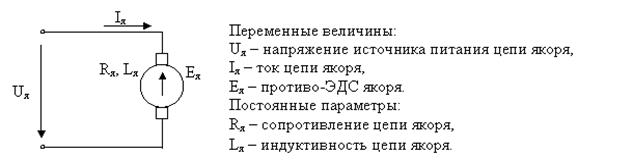
Примеры апериодических звеньев Цепь якоря двигателя постоянного тока
Дифференциальное уравнение якорной цепи (по 2-му закону Кирхгофа):
где Входной величиной звена будем считать разность
Находим передаточную функцию звена:
Получена передаточная функция апериодического звена. Коэффициентом К является величина
Билет 2 Билет 3 Билет 4 Примеры безынерционых звеньев
Электронный усилитель
Уравнение усилителя: u2=Ku1, где К – коэффициент усиления.
Замечание. Представление усилителя пропорциональным звеном всегда является идеализированным. Реальный усилитель не может пропускать сигналы всех частот одинаково, с увеличением частоты входного напряжения коэффициент усиления реального усилителя будет уменьшаться, однако в широкой полосе частот это уменьшение незначительно и его можно не учитывать.
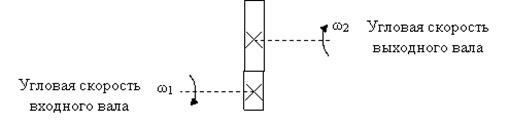
Механический редуктор
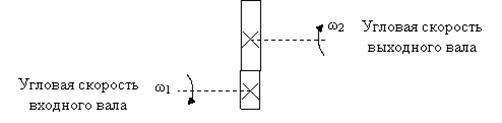
Уравнение редуктора: ω 2=Kω 1, где К – передаточное отношение редуктора.
Замечание. Представление редуктора пропорциональным звеном всегда является идеализированным, т.к. не учитывается упругие деформации валов и шестерен (они предполагаются абсолютно жесткими), а также зазоры в зубчатых передачах.
Билет 5 Примеры интегрирующих звеньев
Гидравлический демпфер
Скорость движения поршня будет пропорциональна силе:
Замечание. Такое математическое описание допустимо, только если пренебречь механической инерцией поршня, силами трения между поршнем и стенками и рядом других факторов.
Билет 6 Аналоговые датчики. Аналоговые измерительные датчики-первичные преобразователи.Такой тип датчиков применяется в системах непрерывного измерения и регулирования.Принцып действия этих датчиков состоит в том, что при изменении параметра происходит соответствующее изменение его выходного сигнала. Датчик – это элемент измерительного, сигнального, регулирующего или управляющего устройства, преобразующий контролируемую величину (температуру, давление, частоту, силу света, электрическое напряжение, ток и т.д.) в сигнал, удобный для измерения, передачи, хранения, обработки, регистрации, а иногда и для воздействия им на управляемые процессы. Или проще, датчик – это устройство, преобразующее входное воздействие любой физической величины в сигнал, удобный для дальнейшего использования. Аналоговые датчики, т. е. датчики, вырабатывающие аналоговый сигнал, пропорционально изменению входной величины; Аналоговые сигналы, вырабатываемые датчиками, обычно необходимо так или иначе преобразовать прежде, чем ввести их в компьютер. Сигнал в виде напряжения должен быть усилен так, чтобы соответствовать диапазону напряжений интерфейса компьютера. Более того, иногда уровень напряжения датчика должен быть смещен, чтобы привести в соответствие минимальный уровень выхода датчика с минимальным напряжением интерфейса компьютера. Эта процедура называется согласованием сигнала. При передаче аналоговых сигналов существуют специфические проблемы, обусловленные электрическими возмущениями. Сигнал, передаваемый от датчика по электрическому проводнику, может подвергнуться зашумлению под влиянием среды из-за нежелательных связей резистивного, индуктивного или емкостного характера. Этот шум может исказить исходный сигнал. Одно из возможных решений — преобразовать аналоговый измерительный сигнал в последовательность импульсов, частота или продолжительность которых известным образом связана с уровнем исходного сигнала, а затем передавать этот преобразованный измерительный сигнал. Такой переход особенно полезен, когда внешний шум имеет ту же частоту, что и исходный сигнал. Используемые датчики весьма разнообразны и могут быть классифицированы по различным признакам: В зависимости от вида входной (измеряемой) величины различают: датчики механических перемещений (линейных и угловых), пневматические, электрические, расходомеры, датчики скорости, ускорения, усилия, температуры, давления и др. В настоящее время существует приблизительно следующее распределение доли измерений различных физических величин в промышленности: температура – 50%, расход (массовый и объемный) – 15%, давление – 10%, уровень – 5%, количество (масса, объем) – 5%, время – 4%, электрические и магнитные величины – менее 4%.
По виду выходной величины, в которую преобразуется входная величина, различаютнеэлектрические и электрические: датчики постоянного тока (ЭДС или напряжения), датчики амплитуды переменного тока (ЭДС или напряжения), датчики частоты переменного тока (ЭДС или напряжения), датчики сопротивления (активного, индуктивного или емкостного) и др. Большинство датчиков являются электрическими. Это обусловлено следующими достоинствами электрических измерений: - электрические величины удобно передавать на расстояние, причем передача осуществляется с высокой скоростью; - электрические величины универсальны в том смысле, что любые другие величины могут быть преобразованы в электрические и наоборот; - они точно преобразуются в цифровой код и позволяют достигнуть высокой точности, чувствительности и быстродействия средств измерений.
По принципу действия датчики можно разделить на два класса: генераторные и параметрические (датчики-модуляторы). Генераторные датчики осуществляют непосредственное преобразование входной величины в электрический сигнал. Параметрические датчики входную величину преобразуют в изменение какого-либо электрического параметра (R, L или C) датчика.
По принципу действия датчики также можно разделить на омические, реостатные, фотоэлектрические (оптико-электронные), индуктивные, емкостные и д.р. Различают три класса датчиков: - аналоговые датчики, т. е. датчики, вырабатывающие аналоговый сигнал, пропорционально изменению входной величины; - цифровые датчики, генерирующие последовательность импульсов или двоичное слово; - бинарные (двоичные) датчики, которые вырабатывают сигнал только двух уровней: " включено/выключено" (иначе говоря, 0 или 1); получили широкое распространение благодаря своей простоте.
3. Практическая задача: Рассчитать основные характеристики идеального дифференцирующего звена, такие как: передаточная функция, комплексная частотная характеристика (КЧХ), амплитудно-частотная характеристика (АЧХ) и фазо-частотная характеристика (ФЧХ). Привести примеры данного типа элементарного динамического звена. Дифференциальное уравнение:
Передаточная функция:
Переходная характеристика: Это дельта-импульс с площадью К. При постоянной входной величине выходная величина дифференцирующего звена равна нулю.
КЧХ:
АЧХ:
ФЧХ:
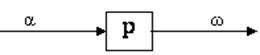
Примеры дифференцирующих звеньев Дифференцирующее звено является идеальным (физически нереализуемым) звеном. Это означает, что его нельзя реализовать искусственно. Однако такое звено может встретиться в модели объекта управления, когда две физические величины по своему определению связаны через производную. Примером таких величин могут быть угол поворота вала двигателя α и угловая скорость ω. По определению угловая скорость является производной угла:
Поэтому угол поворота может рассматриваться как входная величина, а угловая скорость – как выходная величина дифференцирующего звена (в данном случае К=1).
Также дифференцирующие звенья могут использоваться в случаях, когда не учитывается какое-то существенное свойство рассматриваемого объекта (при идеализированном его представлении).
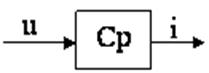
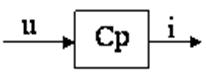
Рассмотрим идеальный конденсатор, обладающий только емкостью C и не обладающего активным сопротивлением R=0.
Таким образом, модель идеального конденсатора будет дифференцирующим звеном с передаточной функцией W(p)=Cp.
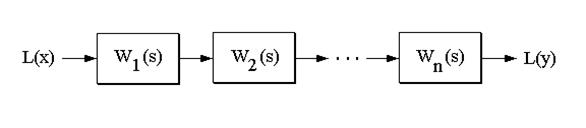
Билет 7 Последовательное соединение При последовательном соединении звеньев выходная величина каждого предшествующего звена является входным воздействием последующего звена. При преобразовании структурных схем цепочку из последовательно соединенных звеньев можно заменить одним звеном с передаточной функцией, равной произведению передаточных функций отдельных звеньев:
где L(x) – изображение по Лапласу входного воздействия; L(y) – изображение по Лапласу выходного сигнала; W1(s), W2(s), …Wn(s) – передаточные функции отдельных звеньев. Структурная схема последовательного соединения звеньев:
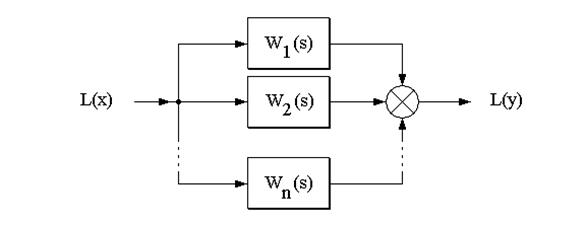
Параллельное соединение При параллельном соединении на вход всех звеньев подается один и тот же сигнал, а выходные величины складываются. Систему из нескольких параллельно соединенных звеньев можно заменить одним звеном с передаточной функцией, равной сумме передаточных функций входящих в нее звеньев:
Структурная схема параллельного соединения звеньев:
Примеры безынерционых звеньев
Электронный усилитель
Уравнение усилителя: u2=Ku1, где К – коэффициент усиления.
Замечание. Представление усилителя пропорциональным звеном всегда является идеализированным. Реальный усилитель не может пропускать сигналы всех частот одинаково, с увеличением частоты входного напряжения коэффициент усиления реального усилителя будет уменьшаться, однако в широкой полосе частот это уменьшение незначительно и его можно не учитывать.
Механический редуктор
Уравнение редуктора: ω 2=Kω 1, где К – передаточное отношение редуктора.
Замечание. Представление редуктора пропорциональным звеном всегда является идеализированным, т.к. не учитывается упругие деформации валов и шестерен (они предполагаются абсолютно жесткими), а также зазоры в зубчатых передачах.
Билет 8 Принцип компенсации Если возмущающий фактор искажает выходную величину до недопустимых пределов, то применяют принцип компенсации(рис.6, КУ - корректирующее устройство). Пусть yо - значение выходной величины, которое требуется обеспечить согласно программе. На самом деле из-за возмущения f на выходе регистрируется значение y. Величина e = yо - y называется отклонением от заданной величины. Если каким-то образом удается измерить величину f, то можно откорректировать управляющее воздействие u на входе ОУ, суммируя сигнал УУ с корректирующим воздействием, пропорциональным возмущению f и компенсирующим его влияние. Примеры систем компенсации: биметаллический маятник в часах, компенсационная обмотка машины постоянного тока и т.п. На рис.6 в цепи НЭ стоит термосопротивление R t, величина которого меняется в зависимости от колебаний температуры окружающей среды, корректируя напряжение на НЭ. Достоинство принципа компенсации: быстрота реакции на возмущения. Он более точен, чем принцип разомкнутого управления. Недостаток: невозможность учета подобным образом всех возможных возмущений. Принцип обратной связи Наибольшее распространение в технике получил принцип обратной связи (рис.7). Здесь управляющее воздействие корректируется в зависимости от выходной величины y(t). И уже не важно, какие возмущения действуют на ОУ. Если значение y(t) отклоняется от требуемого, то происходит корректировка сигнала u(t) с целью уменьшения данного отклонения. Связь выхода ОУ с его входом называется главной обратной связью (ОС). В частном случае (рис.8) ЗУ формирует требуемое значение выходной величины yо(t), которое сравнивается с действительным значением на выходе САУ y(t). Отклонение e = yо-y с выхода сравнивающего устройства подается на входрегулятора Р, объединяющего в себе УУ, УО, ЧЭ.Если e0, то регулятор формирует управляющее воздействие u(t), действующее до тех пор, пока не обеспечится равенство e = 0, или y = yо. Так как на регулятор подается разность сигналов, то такая обратная связь называется отрицательной, в отличие от положительной обратной связи, когда сигналы складываются. Такое управление в функции отклонения называется регулированием, а подобную САУ называют системой автоматического регулирования (САР). Так на рис.9 изображена упрощенная схема САР хлебопекарной печи. Роль ЗУ здесь выполняет потенциометр, напряжение на котором U з сравнивается с напряжением на термопаре U т. Их разность U через усилитель подается на исполнительный двигатель ИД, регулирующий через редуктор положение движка реостата в цепи НЭ. Наличие усилителя говорит о том, что данная САР является системой непрямого регулирования, так как энергия для функций управления берется от посторонних источников питания, в отличие от систем прямого регулирования, в которых энергия берется непосредственно от ОУ, как, например, в САР уровня воды в баке (рис.10). Недостатком принципа обратной связи является инерционность системы. Поэтому часто применяют комбинацию данного принципа с принципом компенсации, что позволяет объединить достоинства обоих принципов: быстроту реакции на возмущение принципа компенсации и точность регулирования независимо от природы возмущений принципа обратной связи.
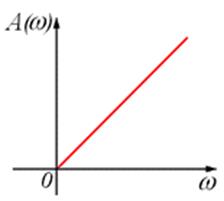
3. Практическая задача: Рассчитать основные характеристики идеального интегрирующего звена, такие как: передаточная функция, комплексная частотная характеристика (КЧХ), амплитудно-частотная характеристика (АЧХ) и фазо-частотная характеристика (ФЧХ). Привести примеры данного типа элементарного динамического звена. Дифференциальное уравнение:
Передаточная функция:
k - коэффициентом передачи звена. постоянная времени (в сек.) Переходная функция: h(t)=K·t Ее значение линейно нарастает во времени (теоретически до бесконечности). Скорость нарастания переходной функции равна коэффициенту К.
КЧХ:
АЧХ:
АЧХ представляет собой гиперболу, которая при
ФЧХ:
показывает, что сдвиг фаз, создаваемый звеном, на всех частотах одинаков и равен -900.
Примеры интегрирующих звеньев
Гидравлический демпфер
Скорость движения поршня будет пропорциональна силе:
Замечание. Такое математическое описание допустимо, только если пренебречь механической инерцией поршня, силами трения между поршнем и стенками и рядом других факторов.
Билет 9 1. Агрегатирование – принцип формирования состава серийно изготавливаемых средств автоматизации, направленный на максимальное удовлетворение запросов предприятий–потребителей при ограниченной номенклатуре серийно выпускаемой продукции. Агрегатирование базируется на том, что сложные функции управления можно разложить на простейшие составляющие (также, как, например, сложные вычислительные алгоритмы можно представить в виде совокупности отдельных простейших операторов). Таким образом, агрегатирование основывается на разложении общей задачи управления на ряд простейших однотипных операций, повторяющихся в тех или иных комбинациях в самых различных системах управления.При анализе большого количества подобных систем управления можно выделить ограниченный набор простейших функциональных операторов, на комбинации которых строится практически любой вариант АСУТП. В результате формируется состав серийно изготавливаемых средств автоматизации, включающий такие конструктивно завершенные и функционально самостоятельные единицы, как блоки и модули, приборы и механизмы. Унификация средств автоматизации.Унификация – сопутствующий агрегатированию метод стандартизации, также направленный на упорядочение и разумное сокращение состава серийно изготовляемых средств автоматизации. Она направлена на ограничение многообразия параметров и технических характеристик, принципов действия и схем, а также конструктивных особенностей исполнения средств автоматизации. Сигналы — носители информации в средствах автоматизации могут различаться как по физической природе и параметрам, так и по форме представления информации. В рамках ГСП применяются в серийном производстве средств автоматизации следующие типы сигналов: - электрический сигнал (напряжение, сила или частота электрического тока); - пневматический сигнал (давление сжатого воздуха); - гидравлический сигнал (давление или перепад давлений жидкости). Соответственно в рамках ГСП формируются электрическая, пневматическая и гидравлическая ветви средств автоматизации. Наиболее развитой ветвью средств автоматизации является электрическая. В то же время широко используются и пневматические средства. Развитие пневматической ветви ограничивается относительно низкой скоростью преобразования и передачи пневматических сигналов. Тем не менее в области автоматизации пожаро- и взрывоопасных производств пневматические средства находятся, по существу, вне конкуренции. Гидравлическая ветвь средств ГСП не получила широкого развития. По форме представления информации сигнал может быть аналоговым, импульсным и кодовым. Аналоговый сигнал характеризуется текущими изменениями какого—либо физического параметра—носителя (например, мгновенными значениями электрического напряжения или тока). Такой сигнал существует практически в каждый данный момент времени и может принимать любые значения в пределах заданного диапазона изменений параметра. Импульсный сигнал характерен представлением информации только в дискретные моменты времени, т.е. наличием квантования по времени. При этом информация представляется в виде последовательности импульсов одинаковой продолжительности, но различной амплитуды (амплитудно-импульсная модуляция сигнала) или одинаковой амплитуды, но разной продолжительности (широтно-импульсная модуляция сигнала). Амплитудно-импульсная модуляция (АИМ) сигнала применяется в тех случаях, когда значения физического параметра—носителя информации могут изменяться со временем. Широтно-импульсная модуляция (ШИМ) сигнала используется, если физический параметр—носитель информации может принимать лишь некоторое постоянное значение. Кодовый сигнал представляет собой сложную последовательность импульсов, используемую для передачи цифровой информации. При этом каждая цифра может быть представлена в виде сложной последовательности импульсов, т.е. кода, а передаваемый сигнал является дискретным (квантуется) и по времени, и по уровню. В соответствии с формой представления информации средства ГСП подразделяются на аналоговые и дискретно-цифровые. К последним относятся также средства вычислительной техники. Все параметры и характеристики сигналов—носителей информации в средствах ГСП унифицированы. Стандартами предусматривается использование в аналоговых средствах следующих видов электрических сигналов: - сигнал по изменению силы постоянного тока (токовый сигнал); - сигнал по изменению напряжения постоянного тока; - сигнал по изменению напряжения переменного тока; - частотный электрический сигнал. Сигналы постоянного тока используются чаще. При этом токовый сигнал (с большим внутренним сопротивлением источника) применяется для передачи информации в относительно длинных линиях связи. Сигналы переменного тока редко используются для преобразования и передачи информации во внешних линиях связи. Это связано с тем, что при сложении и вычитании сигналов переменного тока необходимо выполнить требование синфазности, а также обеспечить подавление нелинейных искажений гармоник тока. В то же время при использовании этого сигнала легко реализуются задачи гальванического разделения электрических цепей. Электрический частотный сигнал является потенциально наиболее помехоустойчивым аналоговым сигналом. В то же время получение и осуществление линейных преобразований этого сигнала вызывает известные затруднения. Поэтому частотный сигнал не получил широкого распространения. Для каждого вида сигналов установлен ряд унифицированных диапазонов их изменений. Стандарты на виды и параметры сигналов унифицируют систему внешних связей или интерфейс средств автоматизации. Такая унификация, дополненная стандартами на устройства коммутации блоков друг с другом (в виде системы разъемов), создает предпосылки для максимального упрощения проектирования, монтажа, коммутации и наладки технических средств систем управления. При этом блоки, приборы и прочие устройства с одинаковым типом и диапазоном параметров сигналов на входах—выходах стыкуются путем простого соединения разъемов.
Примеры дифференцирующих звеньев Дифференцирующее звено является идеальным (физически нереализуемым) звеном. Это означает, что его нельзя реализовать искусственно. Однако такое звено может встретиться в модели объекта управления, когда две физические величины по своему определению связаны через производную. Примером таких величин могут быть угол поворота вала двигателя α и угловая скорость ω. По определению угловая скорость является производной угла:
Поэтому угол поворота может рассматриваться как входная величина, а угловая скорость – как выходная величина дифференцирующего звена (в данном случае К=1).
Также дифференцирующие звенья могут использоваться в случаях, когда не учитывается какое-то существенное свойство рассматриваемого объекта (при идеализированном его представлении).
Рассмотрим идеальный конденсатор, обладающий только емкостью C и не обладающего активным сопротивлением R=0.
Таким образом, модель идеального конденсатора будет дифференцирующим звеном с передаточной функцией W(p)=Cp.
Билет 10 Аналоговые датчики. Аналоговые измерительные датчики-первичные преобразователи.Такой тип датчиков применяется в системах непрерывного измерения и регулирования.Принцып действия этих датчиков состоит в том, что при изменении параметра происходит соответствующее изменение его выходного сигнала. Датчик – это элемент измерительного, сигнального, регулирующего или управляющего устройства, преобразующий контролируемую величину (температуру, давление, частоту, силу света, электрическое напряжение, ток и т.д.) в сигнал, удобный для измерения, передачи, хранения, обработки, регистрации, а иногда и для воздействия им на управляемые процессы. Или проще, датчик – это устройство, преобразующее входное воздействие любой физической величины в сигнал, удобный для дальнейшего использования. Аналоговые датчики, т. е. датчики, вырабатывающие аналоговый сигнал, пропорционально изменению входной величины; Аналоговые сигналы, вырабатываемые датчиками, обычно необходимо так или иначе преобразовать прежде, чем ввести их в компьютер. Сигнал в виде напряжения должен быть усилен так, чтобы соответствовать диапазону напряжений интерфейса компьютера. Более того, иногда уровень напряжения датчика должен быть смещен, чтобы привести в соответствие минимальный уровень выхода датчика с минимальным напряжением интерфейса компьютера. Эта процедура называется согласованием сигнала. При передаче аналоговых сигналов существуют специфические проблемы, обусловленные электрическими возмущениями. Сигнал, передаваемый от датчика по электрическому проводнику, может подвергнуться зашумлению под влиянием среды из-за нежелательных связей резистивного, индуктивного или емкостного характера. Этот шум может исказить исходный сигнал. Одно из возможных решений — преобразовать аналоговый измерительный сигнал в последовательность импульсов, частота или продолжительность которых известным образом связана с уровнем исходного сигнала, а затем передавать этот преобразованный измерительный сигнал. Такой переход особенно полезен, когда внешний шум имеет ту же частоту, что и исходный сигнал. Используемые датчики весьма разнообразны и могут быть классифицированы по различным признакам: В зависимости от вида входной (измеряемой) величины различают: датчики механических перемещений (линейных и угловых), пневматические, электрические, расходомеры, датчики скорости, ускорения, усилия, температуры, давления и др. В настоящее время существует приблизительно следующее распределение доли измерений различных физических величин в промышленности: температура – 50%, расход (массовый и объемный) – 15%, давление – 10%, уровень – 5%, количество (масса, объем) – 5%, время – 4%, электрические и магнитные величины – менее 4%.
По виду выходной величины, в которую преобразуется входная величина, различаютнеэлектрические и электрические: датчики постоянного тока (ЭДС или напряжения), датчики амплитуды переменного тока (ЭДС или напряжения), датчики частоты переменного тока (ЭДС или напряжения), датчики сопротивления (активного, индуктивного или емкостного) и др. Большинство датчиков являются электрическими. Это обусловлено следующими достоинствами электрических измерений: - электрические величины удобно передавать на расстояние, причем передача осуществляется с высокой скоростью; - электрические величины универсальны в том смысле, что любые другие величины могут быть преобразованы в электрические и наоборот; - они точно преобразуются в цифровой код и позволяют достигнуть высокой точности, чувствительности и быстродействия средств измерений.
По принципу действия датчики можно разделить на два класса: генераторные и параметрические (датчики-модуляторы). Генераторные датчики осуществляют непосредственное преобразование входной величины в электрический сигнал. Параметрические датчики входную величину преобразуют в изменение какого-либо электрического параметра (R, L или C) датчика.
По принципу действия датчики также можно разделить на омические, реостатные, фотоэлектрические (оптико-электронные), индуктивные, емкостные и д.р. Различают три класса датчиков: - аналоговые датчики, т. е. датчики, вырабатывающие аналоговый сигнал, пропорционально изменению входной величины; - цифровые датчики, генерирующие последовательность импульсов или двоичное слово; - бинарные (двоичные) датчики, которые вырабатывают сигнал только двух уровней: " включено/выключено" (иначе говоря, 0 или 1); получили широкое распространение благодаря своей простоте.
3. Практическая задача: Рассчитать основные характеристики апериодического (инерционного) звена, такие как: передаточная функция, комплексная частотная характеристика (КЧХ), амплитудно-частотная характеристика (АЧХ) и фазо-частотная характеристика (ФЧХ). Привести примеры данного типа элементарного динамического звена. Дифференциальное уравнение:
Передаточная функция:
, где K – статический коэффициент передачи, Т – постоянная времени (сек). Переходная функция: |
Последнее изменение этой страницы: 2017-04-12; Просмотров: 2565; Нарушение авторского права страницы
 или
или ,
,  – электромагнитная постоянная времени.
– электромагнитная постоянная времени. , а выходной величиной – ток якоря Iя. Запишем уравнение якорной цепи для изображений величин:
, а выходной величиной – ток якоря Iя. Запишем уравнение якорной цепи для изображений величин: 

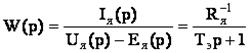
 – проводимость цепи якоря. Цепь якоря обладает электромагнитной инерцией, обусловленной ее индуктивностью.
– проводимость цепи якоря. Цепь якоря обладает электромагнитной инерцией, обусловленной ее индуктивностью.

 , следовательно, перемещение поршня будет пропорционально интегралу силы:
, следовательно, перемещение поршня будет пропорционально интегралу силы:  . Коэффициент К – зависит от конструкции демпфера и вязкости жидкости.
. Коэффициент К – зависит от конструкции демпфера и вязкости жидкости.
 где
где  – дельта-функция;
– дельта-функция; 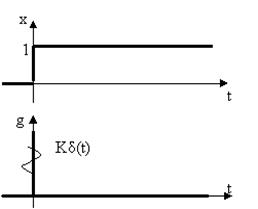














 стремится к бесконечности.
стремится к бесконечности.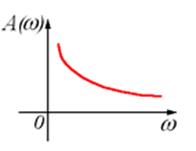



 , следовательно, перемещение поршня будет пропорционально интегралу силы:
, следовательно, перемещение поршня будет пропорционально интегралу силы: 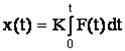 . Коэффициент К – зависит от конструкции демпфера и вязкости жидкости.
. Коэффициент К – зависит от конструкции демпфера и вязкости жидкости.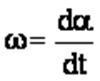

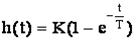 . Зависимость h(t) – экспоненциальная.
. Зависимость h(t) – экспоненциальная.