
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Поколения промышленных роботов.
Промышленный робот — автономное устройство, состоящее из механического манипулятора и перепрограммируемой системы управления, которое применяется для перемещения объектов в пространстве в различных производственных процессах. Роботы первого поколения часто называют программными. Эти роботы предназначены для выполнения запрограммированной последовательности операций по четкой программе, составленной с учетом требований того или иного технологического процесса. Особенно эффективно применение роботов первого поколения при неизменных и строго определенных условиях эксплуатации. Поэтому они широко внедряются в производство при выполнении простейших операций сборки, установки, снятия, транспортирования и упаковки изделий. Однако благодаря простоте изменения программы, заложенной в память системы управления робота, возможно переобучение его путем перепрограммирования на выполнение другого класса операций. Роботы второго поколения называют адаптивными. Системы управления этими роботами имеют более широкий по сравнению с программным набор датчиков информации о состоянии внешней среды и характеризуются большей сложностью. Алгоритм управления роботами второго поколения значительно сложнее, чем роботами с жесткой программой, и часто имеет ситуационный характер, что требует реализации его с помощью микроЭВМ или микропроцессора. Благодаря широко развитому программному обеспечению, наличию совершенных устройств системы очувствления роботы второго поколения способны приспосабливать свое поведение к изменяющейся обстановке.
Фундаментальные принципы управления. Принято различать три фундаментальных принципа управления: принцип разомкнутого управления, принцип компенсации, принцип обратной связи. Принцип разомкнутого управления Рассмотрим САУ хлебопекарной печи (рис.1). Ее принципиальная схема показывает принцип действия данной конкретной САУ, состоящей из конкретных технических устройств. Принципиальные схемы могут быть электрическими, гидравлическими, кинематическими и т.п. Технология выпечки требует изменения температуры в печи по заданной программе, в частном случае требуется поддержание постоянной температуры. Для этого надо реостатом регулировать напряжение на нагревательном элементе НЭ. Подобная часть ОУ, с помощью которой можно изменять параметры управляемого процесса называется управляющим органом объекта (УО). Это может быть реостат, вентиль, заслонка и т.п. Часть ОУ, которая преобразует управляемую величину в пропорциональную ей величину, удобную для использования в САУ, называют чувствительным элементом (ЧЭ). Физическую величину на выходе ЧЭ называют выходной величиной ОУ. Как правило, это электрический сигнал (ток, напряжение) или механическое перемещение. В качестве ЧЭ могут использоваться термопары, тахометры, рычаги, электрические мосты, датчики давления, деформации, положения и т.п. В нашем случае это термопара, на выходе которой формируется напряжение, пропорциональное температуре в печи, подаваемое на измерительный прибор ИП для контроля. Физическую величину на входе управляющего органа ОУ называют входной величиной ОУ. Управляющее воздействие u(t) - это воздействие, прикладываемое к УО объекта с целью поддержания требуемых значений управляемой величины. Оно формируется устройством управления (УУ). Ядром УУ является исполнительный элемент, в качестве которого может использоваться электрические или поршневые двигатели, мембраны, электромагниты и т.п. Задающим устройством (ЗУ) называется устройство, задающее программу изменения управляющего воздействия, то есть формирующее задающий сигнал uо(t). В простейшем случае uо(t)=const. ЗУ может быть выполнено в виде отдельного устройства, быть встроенным в УУ или же вообще отсутствовать. В качестве ЗУ может выступать кулачковый механизм, магнитофонная лента, маятник в часах, задающий профиль и т.п. Роль УУ и ЗУ может исполнять человек. Однако это уже не САУ. В нашем примере УУ является кулачковый механизм, перемещающий движок реостата согласно программе, которая задается профилем кулачка. Рассмотренную САУ можно представить в виде функциональной схемы, элементы которой называются функциональными звеньями. Эти звенья изображаются прямоугольниками, в которых записывается функция преобразования входной величины в выходную (рис.2). Эти величины могут иметь одинаковую или различную природу, например, входное и выходное электрическое напряжение, или электрическое напряжение на входе и скорость механического перемещения на выходе и т.п. Величина f(t), подаваемая на второй вход звена, называется возмущением. Она отражает влияние на выходную величину y(t) изменений окружающей среды, нагрузки и т.п. В общем случае функциональное звено может иметь несколько входов и выходов (рис.3). Здесь u1, u2,..., un - входные (управляющие) воздействия; f1, f2,..., fm - возмущающие воздействия; y1, y2,..., yk - выходные величины. Принцип работы функциональных звеньев может быть различным, поэтому функциональная схема не дает представление о принципе действия конкретной САУ, а показывает лишь пути прохождения и способы обработки и преобразования сигналов. Сигнал - это информационное понятие, соответствующее на принципиальной схеме физическим величинам. Пути его прохождения указываются направленными отрезками (рис.4). Точки разветвления сигнала называются узлами. Сигнал определяется лишь формой изменения физической величины, он не имеет ни массы, ни энергии, поэтому в узлах он не делится, и по всем путям от узла идут одинаковые сигналы, равные сигналу, входящему в узел. Суммирование сигналов осуществляется в сумматоре, вычитание - в сравнивающем устройстве. Рассмотренную САУ хлебопекарной печи можно изобразить функциональной схемой (рис.5). В данной схеме заложенпринцип разомкнутого управления, сущность которого состоит в том, что программа управления жестко задана ЗУ; управление не учитывает влияние возмущений на параметры процесса. Примерами систем, работающих по принципу разомкнутого управления, являются часы, магнитофон, компьютер и т.п. Принцип компенсации Если возмущающий фактор искажает выходную величину до недопустимых пределов, то применяют принцип компенсации(рис.6, КУ - корректирующее устройство). Пусть yо - значение выходной величины, которое требуется обеспечить согласно программе. На самом деле из-за возмущения f на выходе регистрируется значение y. Величина e = yо - y называется отклонением от заданной величины. Если каким-то образом удается измерить величину f, то можно откорректировать управляющее воздействие u на входе ОУ, суммируя сигнал УУ с корректирующим воздействием, пропорциональным возмущению f и компенсирующим его влияние. Примеры систем компенсации: биметаллический маятник в часах, компенсационная обмотка машины постоянного тока и т.п. На рис.6 в цепи НЭ стоит термосопротивление R t, величина которого меняется в зависимости от колебаний температуры окружающей среды, корректируя напряжение на НЭ. Достоинство принципа компенсации: быстрота реакции на возмущения. Он более точен, чем принцип разомкнутого управления. Недостаток: невозможность учета подобным образом всех возможных возмущений. Принцип обратной связи Наибольшее распространение в технике получил принцип обратной связи (рис.7). Здесь управляющее воздействие корректируется в зависимости от выходной величины y(t). И уже не важно, какие возмущения действуют на ОУ. Если значение y(t) отклоняется от требуемого, то происходит корректировка сигнала u(t) с целью уменьшения данного отклонения. Связь выхода ОУ с его входом называется главной обратной связью (ОС). В частном случае (рис.8) ЗУ формирует требуемое значение выходной величины yо(t), которое сравнивается с действительным значением на выходе САУ y(t). Отклонение e = yо-y с выхода сравнивающего устройства подается на входрегулятора Р, объединяющего в себе УУ, УО, ЧЭ.Если e0, то регулятор формирует управляющее воздействие u(t), действующее до тех пор, пока не обеспечится равенство e = 0, или y = yо. Так как на регулятор подается разность сигналов, то такая обратная связь называется отрицательной, в отличие от положительной обратной связи, когда сигналы складываются. Такое управление в функции отклонения называется регулированием, а подобную САУ называют системой автоматического регулирования (САР). Так на рис.9 изображена упрощенная схема САР хлебопекарной печи. Роль ЗУ здесь выполняет потенциометр, напряжение на котором U з сравнивается с напряжением на термопаре U т. Их разность U через усилитель подается на исполнительный двигатель ИД, регулирующий через редуктор положение движка реостата в цепи НЭ. Наличие усилителя говорит о том, что данная САР является системой непрямого регулирования, так как энергия для функций управления берется от посторонних источников питания, в отличие от систем прямого регулирования, в которых энергия берется непосредственно от ОУ, как, например, в САР уровня воды в баке (рис.10). Недостатком принципа обратной связи является инерционность системы. Поэтому часто применяют комбинацию данного принципа с принципом компенсации, что позволяет объединить достоинства обоих принципов: быстроту реакции на возмущение принципа компенсации и точность регулирования независимо от природы возмущений принципа обратной связи.
3. Практическая задача: Рассчитать основные характеристики идеального интегрирующего звена, такие как: передаточная функция, комплексная частотная характеристика (КЧХ), амплитудно-частотная характеристика (АЧХ) и фазо-частотная характеристика (ФЧХ). Привести примеры данного типа элементарного динамического звена. Дифференциальное уравнение:
Передаточная функция:
k - коэффициентом передачи звена. постоянная времени (в сек.) Переходная функция: h(t)=K·t Ее значение линейно нарастает во времени (теоретически до бесконечности). Скорость нарастания переходной функции равна коэффициенту К.
КЧХ:
АЧХ:
АЧХ представляет собой гиперболу, которая при
ФЧХ:
показывает, что сдвиг фаз, создаваемый звеном, на всех частотах одинаков и равен -900.
Примеры интегрирующих звеньев
Гидравлический демпфер
Скорость движения поршня будет пропорциональна силе:
Замечание. Такое математическое описание допустимо, только если пренебречь механической инерцией поршня, силами трения между поршнем и стенками и рядом других факторов.
|
Последнее изменение этой страницы: 2017-04-12; Просмотров: 833; Нарушение авторского права страницы



 стремится к бесконечности.
стремится к бесконечности.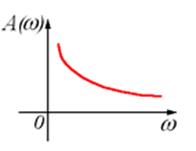



 , следовательно, перемещение поршня будет пропорционально интегралу силы:
, следовательно, перемещение поршня будет пропорционально интегралу силы:  . Коэффициент К – зависит от конструкции демпфера и вязкости жидкости.
. Коэффициент К – зависит от конструкции демпфера и вязкости жидкости.