|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
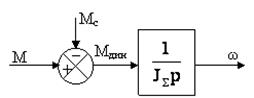
Механическая часть электропривода
М – электромагнитный момент двигателя, Мс – момент статического сопротивления механизма на валу двигателя, ω – угловая скорость вала двигателя.
Скорость двигателя пропорциональна интегралу разности моментов М и Мс, которая называется динамическим моментом: Мдин = М–Мс.
где JΣ – суммарный момент инерции механической части электропривода. Таким образом, моделью механической части электропривода является интегрирующее звено.
Замечание. Такое представление допустимо, только если пренебречь упругими деформациями валов и других элементов механической части, а также, если момент инерции не зависит от скорости и от угла поворота (для кривошипно-шатунного механизма, у которого момент инерции является переменной величиной, эта модель не подходит). Билет 6 Электромагнитные релейные исполнительные механизмы. Электромагнитные релейные исполнительные механизмы. Из группы РИМ наибольшее распространение получили электромагнитные реле. Они подразделяются на реле постоянного и реле переменного тока. Реле постоянного тока, в свою очередь, подразделяются на нейтральные и поляризованные. Нейтральные электромагнитные реле одинаково реагируют на полярность входного сигнала постоянного тока (т.е. положение якоря не зависит от направления тока в обмотке реле). Поляризованное реле реагирует на полярность входного сигнала. По характеру движения якоря электромагнитные нейтральные реле подразделяются на два типа: с поворотным якорем и с втяжным якорем (рис. 6.5). Обычно сердечник снабжается полюсными наконечниками, что уменьшает магнитное сопротивление рабочего воздушного зазора. При отсутствии управляющего сигнала якорь удален от сердечника на максимальное расстояние за счет возвратной пружины. В этом случае одна пара контактов замкнута (РК – размыкающиеся контакты), а другая пара - разомкнута (ЗК – замыкающиеся контакты).
Рис. 6.5. Схемы электромагнитных реле: а, b - клапанного типа; c - с втягиваемым внутрь катушки якорем; 1 - каркас с обмоткой; 2 - ярмо; 3 - выводы обмотки; 4 - колодка; 5 - контактные пружины; 6 - замыкающийся контакт ЗК; 7 - подвижные контакты; 8 - размыкающиеся контакты РК; 9 - возвратная пружина; 10 - якорь; 11 - штифт отлипания; 12 – сердечник. Принцип действия реле (рис. 6.5) основан на следующем: при подаче тока в обмотку (катушку) создается магнитный поток, который проходя через сердечник, ярмо, якорь и воздушный зазор создает магнитное (тяговое) усилие, притягивающее якорь к сердечнику. При этом якорь, воздействуя на колодку, перемещает ее таким образом, что контакты ЗК замыкаются, а РК - размыкаются. Таким образом, электромагнитное реле состоит из трех основных частей: контактной системы, выполненной из материала нейзильбера, магнитопровода (ярмо, сердечник, якорь), выполненные из мягкой стали, и обмотки (катушки). Магнитную цепь составляют сердечник, якорь, ярмо и воздушный зазор между якорем и сердечником.
Аналоговые датчики. Аналоговые измерительные датчики-первичные преобразователи.Такой тип датчиков применяется в системах непрерывного измерения и регулирования.Принцып действия этих датчиков состоит в том, что при изменении параметра происходит соответствующее изменение его выходного сигнала. Датчик – это элемент измерительного, сигнального, регулирующего или управляющего устройства, преобразующий контролируемую величину (температуру, давление, частоту, силу света, электрическое напряжение, ток и т.д.) в сигнал, удобный для измерения, передачи, хранения, обработки, регистрации, а иногда и для воздействия им на управляемые процессы. Или проще, датчик – это устройство, преобразующее входное воздействие любой физической величины в сигнал, удобный для дальнейшего использования. Аналоговые датчики, т. е. датчики, вырабатывающие аналоговый сигнал, пропорционально изменению входной величины; Аналоговые сигналы, вырабатываемые датчиками, обычно необходимо так или иначе преобразовать прежде, чем ввести их в компьютер. Сигнал в виде напряжения должен быть усилен так, чтобы соответствовать диапазону напряжений интерфейса компьютера. Более того, иногда уровень напряжения датчика должен быть смещен, чтобы привести в соответствие минимальный уровень выхода датчика с минимальным напряжением интерфейса компьютера. Эта процедура называется согласованием сигнала. При передаче аналоговых сигналов существуют специфические проблемы, обусловленные электрическими возмущениями. Сигнал, передаваемый от датчика по электрическому проводнику, может подвергнуться зашумлению под влиянием среды из-за нежелательных связей резистивного, индуктивного или емкостного характера. Этот шум может исказить исходный сигнал. Одно из возможных решений — преобразовать аналоговый измерительный сигнал в последовательность импульсов, частота или продолжительность которых известным образом связана с уровнем исходного сигнала, а затем передавать этот преобразованный измерительный сигнал. Такой переход особенно полезен, когда внешний шум имеет ту же частоту, что и исходный сигнал. Используемые датчики весьма разнообразны и могут быть классифицированы по различным признакам: В зависимости от вида входной (измеряемой) величины различают: датчики механических перемещений (линейных и угловых), пневматические, электрические, расходомеры, датчики скорости, ускорения, усилия, температуры, давления и др. В настоящее время существует приблизительно следующее распределение доли измерений различных физических величин в промышленности: температура – 50%, расход (массовый и объемный) – 15%, давление – 10%, уровень – 5%, количество (масса, объем) – 5%, время – 4%, электрические и магнитные величины – менее 4%.
По виду выходной величины, в которую преобразуется входная величина, различаютнеэлектрические и электрические: датчики постоянного тока (ЭДС или напряжения), датчики амплитуды переменного тока (ЭДС или напряжения), датчики частоты переменного тока (ЭДС или напряжения), датчики сопротивления (активного, индуктивного или емкостного) и др. Большинство датчиков являются электрическими. Это обусловлено следующими достоинствами электрических измерений: - электрические величины удобно передавать на расстояние, причем передача осуществляется с высокой скоростью; - электрические величины универсальны в том смысле, что любые другие величины могут быть преобразованы в электрические и наоборот; - они точно преобразуются в цифровой код и позволяют достигнуть высокой точности, чувствительности и быстродействия средств измерений.
По принципу действия датчики можно разделить на два класса: генераторные и параметрические (датчики-модуляторы). Генераторные датчики осуществляют непосредственное преобразование входной величины в электрический сигнал. Параметрические датчики входную величину преобразуют в изменение какого-либо электрического параметра (R, L или C) датчика.
По принципу действия датчики также можно разделить на омические, реостатные, фотоэлектрические (оптико-электронные), индуктивные, емкостные и д.р. Различают три класса датчиков: - аналоговые датчики, т. е. датчики, вырабатывающие аналоговый сигнал, пропорционально изменению входной величины; - цифровые датчики, генерирующие последовательность импульсов или двоичное слово; - бинарные (двоичные) датчики, которые вырабатывают сигнал только двух уровней: " включено/выключено" (иначе говоря, 0 или 1); получили широкое распространение благодаря своей простоте.
3. Практическая задача: Рассчитать основные характеристики идеального дифференцирующего звена, такие как: передаточная функция, комплексная частотная характеристика (КЧХ), амплитудно-частотная характеристика (АЧХ) и фазо-частотная характеристика (ФЧХ). Привести примеры данного типа элементарного динамического звена. Дифференциальное уравнение:
Передаточная функция:
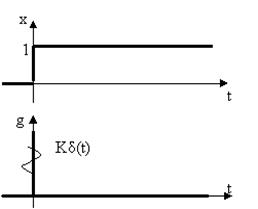
Переходная характеристика: Это дельта-импульс с площадью К. При постоянной входной величине выходная величина дифференцирующего звена равна нулю.
КЧХ:
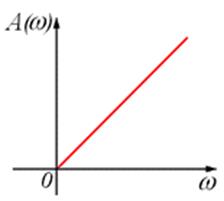
АЧХ:
ФЧХ:
Примеры дифференцирующих звеньев Дифференцирующее звено является идеальным (физически нереализуемым) звеном. Это означает, что его нельзя реализовать искусственно. Однако такое звено может встретиться в модели объекта управления, когда две физические величины по своему определению связаны через производную. Примером таких величин могут быть угол поворота вала двигателя α и угловая скорость ω. По определению угловая скорость является производной угла:
Поэтому угол поворота может рассматриваться как входная величина, а угловая скорость – как выходная величина дифференцирующего звена (в данном случае К=1).
Также дифференцирующие звенья могут использоваться в случаях, когда не учитывается какое-то существенное свойство рассматриваемого объекта (при идеализированном его представлении).
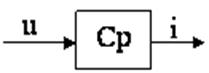
Рассмотрим идеальный конденсатор, обладающий только емкостью C и не обладающего активным сопротивлением R=0.
Таким образом, модель идеального конденсатора будет дифференцирующим звеном с передаточной функцией W(p)=Cp.
Билет 7 |
Последнее изменение этой страницы: 2017-04-12; Просмотров: 699; Нарушение авторского права страницы

 ,
, 

 где
где  – дельта-функция;
– дельта-функция;