|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Классификация кинематических пар по числу условий связи (по И.И.Артоболевскому).Стр 1 из 8Следующая ⇒
Классификация зубчатых механизмов.Передаточное отношения зубчатой передачи. Зубчатые механизмы классифицируются: а) по виду расположения осей – различают зубчатые механизмы: - цилиндрические – при передаче вращения между параллельными осями (рис. 35);
а) б) Рис. 35. Цилиндрические зубчатые механизмы - конические – при передаче вращения между пересекающимися осями (рис. 36);
Рис. 36. Конические зубчатые механизмы - винтовые – при передаче вращения между скрещивающимися осями (рис. 37).
Рис. 37. Винтовой зубчатый механизм б) по виду зацепления – зубчатый механизм может быть с зацеплением зубьев: - внешним (рис. 35, а); - внутренним (рис.35, г); - реечным (рис. 35, в). в) по расположению зубьев колес относительно образующей обода – различают зубчатые передачи: - прямозубые (рис. 35, а); - косозубые (рис. 35, б). 11. Основные элементы и параметры зубчатых колес: Основные параметры зубчатых колес
Виды зубчатых зацеплениий (эвольвентное, циклоидальное, круговинтовое). Эвольвентное зацепление — зубчатое зацепление, в котором профили зубьев очерчены по эвольвенте окружности. Позволяет передавать движение с постоянным передаточным отношением. Для этого необходимо чтобы зубья зубчатых колёс были очерчены по кривой, у которой общая нормаль, проведённая через точку касания профилей зубьев, всегда проходит через одну и ту же точку на линии, соединяющей центры зубчатых колёс, называемую полюсом зацепления.
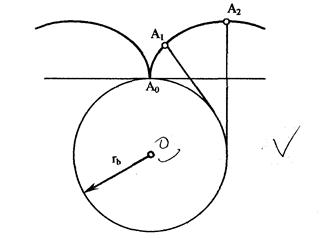
Эвольвента и ее свойства. Образования эвольвентного зацепления. Наиболее распространенным в технике является эвольвентное зацепление. Названо так потому, что боковые профили зубьев выполнены по эвольвенте. Эвольвентное зацепление предложено Эйлером (1707-1783) во второй половине XVIII века. Получило широкое распространение вследствие простоты изготовления эволь-вентных зубьев. Изобразим окружность, которую будем считать неподвижной (рис. 4). Проведем прямую касательную к этой окружности. Точку касания обозначим А0. Если обкатывать эту прямую по окружности без скольжения, то точка а0 прямой опишет некоторую кривую. Траектория точки А0 и есть эвольвента. Прямую можно обкатывать в двух направлениях. При этом будет образовано две ветви эвольвенты. Точка А0 - начало эвольвенты -называется точкой заострения эвольвенты.
36.? Трение клинового ползуна. - Трения пяты о подпятник. Вследствие большого различия линейной скорости и работы сил трения в разных точках контакта сплошной пяты и подпятника происходит неравномерный износ поверхностей трения, в результате которого рабочие поверхности становятся выпуклыми. При этом увеличиваются удельное давление в центральной части пяты и подпятника, нагрев и износ. Чтобы в этом случае создать воздушную подушку между пятой и подпятником, уравновешивающую нагрузку вала, прибегают к нагнетанию воздуха в зазор извне при помощи специального компрессора. Однако зтот метод, требующий специального сложного оборудования, неудобен. Кроме того, малейшее нарушение подачи воздуха от компрессора неизбежно вызовет аварию. Подпятники. Шарики, заключенные между поверхностями плоской пяты и подпятника, представляют собой простейший вид шарикового подпятника. Рассмотрим движение шарика, предполагая отсутствие скольжения. Точка касания шарика с опорной плоскостью имеет скорость нуль, а точка касания его с пятой — скорость последней. Движение шарика складывается из мгновенного вращения вокруг оси О О с угловой скоростью. 47. Трение скольжения смазанных тел. Основные требования, необходимые для жидкостного трения. При жидкостном трении непосредственного соприкосновения между двумя поверхностями, движущимися относительно друг друга, не бывает, поскольку между этими поверхностями существует промежуточный смазочный слой жидкости. При относительном движении поверхностей отдельные слои жидкости сдвигаются относительно друг друга. Итак, трения в жидком слое сводится к вязкому смещения. Для удобства технических расчетов при изучении жидкостного трения вводят понятие коэффициента трения, но в отличие от коэффициента сухого трения коэффициент жидкостного трения / зависит от скорости v движения слоев масла относительно друг друга, от нагрузки р и от коэффициента вязкости ц. 1) смазочная жидкость занимает зазор между скользящими поверхностями, должна задерживаться в зазорах; 2) в слое масла при относительном скольжении смазываемых поверхностей должно возникать и поддерживаться внутреннее давление, который уравновешивает внешнюю нагрузку, прижимающая скользящие поверхности друг к другу; 3) смазочная жидкость должна полностью отделять скользящие поверхности; 4) слой жидкости между скользящими поверхностями должен иметь толщину, не меньшую определенной минимальной границы, которая определяется высокими элементами поверхностей трущихся тел. Для осуществления первого требования необходимо, чтобы при смачивании твердых тел смазочной жидкостью силы сцепления между поверхностями твердых тел и прилегающим слоем жидкости были больше, чем силы сцепления между частями смазочной жидкости. Тогда при относительном движении смоченных твердых поверхностей возникает скольжение слоев масляной жидкости относительно друг друга и не будет скольжения жидкости относительно твердых тел. Эти свойства тем важнее, чем чаще можно ожидать смешанного или даже трения насухо, между тем как при трении смазанных тел и отдаче тепла при посредстве смазочного материала металл, из которого изготовлен подшипник, не имеет значения. В точке а, наступает уже смешанное трение и связанное с ним изнашивание подшипника, а в точках аг к а3 имеет место трение смазанных тел без изнашивания. Для подшипника наиболее подходит то масло, которое при наивысших значениях pv, возможных по условиям работы подшипника, вызывает наименьшее натревание подшипника. Внешние силы могут быть постоянными, как, например, силы тяжести, сопротивления резанию металла при постоянном сечении стружки и др., или зависящими только от положения звена, на которое они действуют ( силы давления газов, действующих на поршень двигателя внутреннего сгорания или компрессора, сопротивление, встречаемое пуансоном пресса при прошивании отверстий и др.), от скорости звена ( момент электродвигателя, силы трения смазанных тел и др.), от времени. Кроме того, в машине могут действовать силы, зависящие от ряда перечисленных выше независимых переменных. Определение конкретной величины внешней силы возможно только в том случае, если задана ее характеристика. Внешние силы могут быть постоянными, как, например, силы тяжести, сопротивления резанию металла при постоянном сечении стружки и др., пли зависящими только от положения звена, на которое они действуют (силы давления газов, действующих на поршень двигателя внутреннего сгорания или компрессора, сопротивление, встречаемое пуансоном пресса при прошивании отверстий и др.), от скорости звена ( момент электродвигателя, силы трения смазанных тел и др.), от времени. Кроме того, в машине могут действовать силы, зависящие от ряда перечисленных выше независимых переменных. Определение конкретной величины внешней силы возможно только в том случае, если задана ее характеристика классификация кинематических пар по числу условий связи (по И.И.Артоболевскому). Сколько связей столько классов кинематических пар.
3.степень подвижности в пространственных( Формула Сомова-Малышева) и плоских (формула Чебышева) механизмов. Степень подвижности механизма у любого механизма число ведущих (входных ) звеньев соответствует (равно)степени подвижности механизма. Обозначается w- степень подвижности. W=6n-5p5-4p4-3p3-2p2-1 -формула Сомова-Малышева. Плоскость накладывает три ограничения на движения тел то есть каждое свободное на плоскости имеет три движения два вдоль оси х, y и одно вращательное вокруг оси пендикулярно плоскости. Для плоского механизма. W=(6-3)n-(5-3)p5-(4-3)p4-(3-3)p4=3n-2p5-p4 W=3n-2p5-p4 -формула Чебышева П.А. 4. Структурные группы (группы Ассура). Класс и порядок структурных групп. Видоизменения двухпроводных структурных групп. По Ассуру Л.В.: механизмы образовают путем присоединяя структурных групп 0 степеней подвижности к ведущему звену и стойке, а затем к другим звеньями.W=0, следовательно W=3n-2p5=0.
Классом структурной группы Ассура называется число кинематических пар, входящих в замкнутый контур, образованный внутренними кинематическими парами группы (И.И. Артоболевского). Порядок группы определяется числом внешних элементов кинематических пар, которыми группа присоединяется к имеющемуся механизму: первая группа присоединяется к первичному механизму, каждая последующая – к полученному механизму (при этом нельзя присоединять группы к одному звену). Структурные группы 2-го класса (обычно называемые двухповодковыми группами Ассура) дополнительно классифицируются по видам, различающихся сочетанием вращательных и поступательных пар (рис. ниже): Двухповодковые группы Ассура (2-й класс, 2-й порядок) Вид группы Ассура зависит от сочетания вращательных (шарниров) и поступательных (ползунов) кинематических пар в данной группе. Всего существует пять видов групп Ассура второго класса. 5.Структурные анализ механизмов и порядок его выполнения на примере шестизвенного механизма.?
6. Построение планов положений, траекторий точек звеньев механизма. Механизм
7. Построение планов скоростей механизмов(на примере шарнирного четырехзвенника). Векторное управление для определения скоростей точек и порядок построения планов скоростей. Жуковский рассматривает плоский шарнирный механизм, загруженный некоторой системой сил. Если построить в любом масштабе план скоростей этого механизма и, рассматривая его как жесткий рычаг, повернуть около полюса плана, принятого за точку опоры, на 90°, а затем приложить в точках плана, соответствующих точкам приложения сил механизма, те же самые силы, сохраняя их величину и направление, то в случае равновесия механизма рычаг также будет в равновесии. Фиг. 15. Построение планов скоростей и ускорений для четырехзвенного шарнирного механизма а—схема механизма б — план скоростей в — план ускорений. Построение планов скоростей и ускорений для четырехзвенного шарнирного механизма схема механизма план скоростей в — план ускорений. Пентоды 245, 250 Передачи — см. Зубчатые передачи-, Ременные передачи, Цепные передачи, Червячные передачи Перестановки из п элементов 63 Пирамиды — Поверхность и объем 69, 70 Планы сил для механизмов шарнирных 154—156 -- скоростей для звеньев механизмов 133 — Построение 135—138 --ускорений для звеньев механизмов 133 — Построение 137—139 Пластины 260 —Жесткость 373, 375 — Теплоотдача при продольном обтекании 211. Механизмы плоские шарнирные шестизвенные— План сил — Построение 474 — Планы скоростей и ускорений 472 В таблице г — радиус кривошипа ЕМ, п — чис-ло оборотов кривошипа в минуту. Построение планов скоростей и ус ко р е н и й (ф и г. 37) производится теми же приемами, что и для плоских шарнирных механизмов. К построению планов скоростей и ускорений для шарнирного четырехзвенного механизма построению планов скоростей и ускорений для шарнирного четырехзвенного механизма. Вопрос о построении планов скоростей рассмотрим на примере плоского механизма, который носит название шарнирного четырех-звенника. Шарнирный четырехзвенник состоит из четырех звеньев (кривошипа ОА, шатуна АВ, балансира О В, станины О О) и четырех вращательных, кинематических пар. Для каждого положения механизма строят свой план скоростей. Чтобы построить план скоростей шарнирного четырехзвенника, изображенного на рис. 12.11, а, возьмем в плоскости чертежа произвольную точку р и назовем ее полюсом плана скоростей, дано построение повернутого плана скоростей и плана ускорений для шарнирного четырехзвенного механизма с тремя присоединенными к нему группами II класса, перемещение центра масс которого совпадает с перемещением точки 5. Отрезок (рз) в масштабе плана скоростей представляет скорость Vs точки 5 а отрезок (л8) в масштабе (Лд плана ускорений представляет ускорение точки 5. Пример. В шарнирном четырехзвеннике) даны длины звеньев 1, 1 и 1, массы которых Шх, т, и моменты инерции масс 2. з относительно осей, проходящих через центры масс 5 звеньев. Определить величину приведенной к точке А массы механизма. Звено 1 по условию задачи является начальным. Строим в произвольном масштабе план скоростей (рис. 203, 6), после чего определяем кинетическую энергию звена 1 по формуле (141). В таблице дать численные значения линейных скоростей и ускорений шарнирных точек и центров масс звеньев механизма, определив их с помощью планов скоростей, ускорений и диаграмм.
8. Построение планов скоростей механизмов (на примере шарнирного механизма четырехзвенника). Векторное уравнение для определения ускорений точек и порядок построения планов ускорений. Для заданного положения механизма шарнирного четырех-звенника, построением планов скоростей и ускорений. Для заданного положения механизма шарнирного четырех-звенника построением планов скоростей и ускорений. Для того чтобы определить отношение И12, также надо построить план скоростей, но не механизма шарнирного четырехзвенника, а кулисного механизма, который получается при закреплении звена 3 и введении дополнительного ползуна, позволяющего изменять длину шатуна ВС, т. е. сообщать ему перемещение Д/, равное его упругой деформации. Жуковский рассматривает плоский шарнирный механизм, загруженный некоторой системой сил. Если построить в любом масштабе план скоростей этого механизма и, рассматривая его как жесткий рычаг, повернуть около полюса плана, принятого за точку опоры, на 90°, а затем приложить в точках плана, соответствующих точкам приложения сил механизма, те же самые силы, сохраняя их величину и направление, то в случае равновесия механизма рычаг также будет в равновесии. Применим этот метод к нахождению центра кривизны траектории точки С шатуна четырехзвенного шарнирного механизма. Строим на кривошипе О А повернутый план скоростей в виде треугольника О АЬ. Откладываем от точки А вектор скорости Уд в виде. Практические приемы определения сил и в стержневых шарнирных механизмах остаются те же, что и рассмотренные выше для сил Р и Q, — способ непосредственного разложения и способ проф. Жуковского, основанный на применении плана скоростей. Нужно только в число действующих сил ввести силы инерции. Однако чтобы не иметь дело с бесчисленным множеством сил инерции, возникающих в каждом отдельном звене машины и равных 67, - = —(где б/п — элементарная масса звена, а — соответствующее ускорение), эти силы должны быть предварительно объединены в равнодействующие или эквивалентные системы сил и пар, сводящиеся в каждом отдельном звене к немногим силам или парам. Как находятся эти равнодействующие силы инерции, подробно будет выяснено в гл. V. В примере же, разбираемом ниже, силы инерции определены, исходя из условия о том, что их работа численно равна изменению кинетической энергии, а мощность — производной от кинетической энергии по времени. 9.Определение величин и направлений угловых скоростей и угловых звеньев. На рисунке изображен плоский кривошипно-ползунный механизм. Звено ОА вращается вокруг точки О по закону ϕ (t)=π /3t2ϕ (t)=π /3t2 радиан. Известны длины звеньев OA и AB. Найти скорость и ускорение точки B, а также угловую скорость и угловое ускорение звена AB в момент времени t=1ct=1c. На рисунке изображен механизм в положении, соответствующем моменту времени t=1ct=1c. В этот момент времени между звеньями OA и AB прямой угол.
Для определения скорости точки B запишем теорему о скоростях плоской фигуры AB, выбрав за полюс точку А: v⃗ B=v⃗ A+v⃗ BA. (1) v→ B=v→ A+v→ BA. (1) Скорость точки А определим, зная что эта точка вращается вместе со звеном ОА вокруг точки А: vA=ω OA=ϕ ˙ (t)OAvA=ω OA=ϕ ˙ (t)OA Скорость точки А будет направлена перпендикулярно звену ОА. В уравнении (1) известно направление скорости точки B: скорость точки B направлена по горизонтали. Пусть v⃗ Bv→ B направлена справа налево, в результате дальнейших вычислений знак в выражении для vB vB покажет истинное направление скорости v⃗ Bv→ B. Известно также направление скорости точки B при её движении вокруг полюса А: v⃗ BA⊥ ABv→ BA⊥ AB. Величина этой скорости определяется следующим образом: vBA=ω ABAB, vBA=ω ABAB, где ω ABω AB - угловая скорость звена AB. Для определения неизвестных, входящих в векторное уравнение (1) (скорость точки B и угловая скорость ω ABω AB), спроецируем это векторное уравнение на вертикальную и горизонтальную оси. Проекция векторов уравнения на ось xx: vB=vAsinϕ +vBAcosα.vB=vAsin ϕ +vBAcosα. Проекция векторов уравнения на ось xx: 0=vAcosϕ +vBAsinα.0=vAcos ϕ +vBAsinα. Из последнего уравнения определяем vBAvBA и угловую скорость звена AB: vBA=− vAcosϕ sinα, ω AB=− vAcosϕ ABsinα.vBA=− vAcos ϕ sin α, ω AB=− vAcos ϕ ABsin α. Знак минус перед выражением для vBAvBA и ω ABω AB говорит о том, что действительное направление угловой скорости звена AB отличается от того что показано на рисунке. Подставляя vBAvBA в первое уравнение, найдем скорость точки B: vB=vAsinϕ − vAcosϕ tanα.vB=vAsin ϕ − vAcos ϕ tan α. Ускорение точки B определим, используя теорему об ускорениях: a⃗ B=a⃗ A+a⃗ nBA+a⃗ τ BA.a→ B=a→ A+a→ BAn+a→ BAτ. Точка A вращается вместе с телом OA с известным угловым ускорением и угловой скоростью. Ускорение точки А будет складываться из вращательного и осестремительного ускорений: a⃗ A=a⃗ τ A+a⃗ nA.a→ A=a→ Aτ +a→ An. Осе стремительное ускорение, направленное к оси вращения, определится следующим образом: anA=ω 2OA=ϕ ˙ (t)OAaAn=ω 2OA=ϕ ˙ (t)OA Вращательное ускорение точки А, перпендикулярно ОА и равно: aτ A=ε OA=ω ˙ OA=ϕ ¨ (t)OAaAτ =ε OA=ω ˙ OA=ϕ ¨ (t)OA Ускорение точки В, входящее в уравнение (1) направено вдоль оси x. Предположим, что ускорение a⃗ Ba→ B направлено справа налево. Направления компонент полного ускорение точки B при ее движении вокруг точки А: a⃗ nBAa→ BAn и a⃗ τ BAa→ BAτ, показаны на рисунке. Зная угловую скорость вращения звена АВ, определим осе стремительное ускорение точки В при её движении вокруг полюса (точка А): anBA=ω 2ABAB.aBAn=ω AB2AB. Вращательное ускорение точки В вокруг полюса выражается следующим образом: aτ BA=ε ABAB.aBAτ =ε ABAB. Спроецируем векторное уравнение на оси xx и yy. Проекция на ось xx: aB=anAcosϕ +aτ Asinϕ +anBAcosα − aτ BAsinα.aB=aAncos ϕ +aAτ sin ϕ +aBAncos α − aBAτ sin α. Проекция на ось yy: 0=− anAsinϕ +aτ Acosϕ +anBAsinα +aτ BAcosα.0=− aAnsin ϕ +aAτ cos ϕ +aBAnsin α +aBAτ cos α. Из последнего уравнения определяем вращательное ускорение точки В вокруг полюса и угловое ускорение звена АВ: aτ BA=anAsinϕ − aτ Acosϕ − anBAsinα cosα, ε AB=aτ BAAB.aBAτ =aAnsin ϕ − aAτ cos ϕ − aBAnsin α cos α, ε AB=aBAτ AB. Подставив aτ BAaBAτ, найдем ускорение точки B: aB=anAcosϕ +aτ Asinϕ +anBAcosα − (anAsinϕ − aτ Acosϕ − anBAsinα )tanα. |
Последнее изменение этой страницы: 2017-04-13; Просмотров: 999; Нарушение авторского права страницы

 в)
в)  г)
г) 











 Кинематическая схема механизма строится в масштабе. Под масштабом в ТММ понимается количество истинных единиц измеряемой величины, заключенное в 1 мм чертежа. Такое понятие позволяет изображать в виде отрезков на чертеже любые параметры (линейные размеры, перемещения, скорости, ускорения, время, силы и др.). Например:
Кинематическая схема механизма строится в масштабе. Под масштабом в ТММ понимается количество истинных единиц измеряемой величины, заключенное в 1 мм чертежа. Такое понятие позволяет изображать в виде отрезков на чертеже любые параметры (линейные размеры, перемещения, скорости, ускорения, время, силы и др.). Например:  где Kl – масштаб линейных размеров (масштаб длин); АВ – истинный размер некоторого отрезка АВ в м; __ АВ – длина этого отрезка на чертеже в мм;
где Kl – масштаб линейных размеров (масштаб длин); АВ – истинный размер некоторого отрезка АВ в м; __ АВ – длина этого отрезка на чертеже в мм;  где KV – масштаб скоростей; VA – истинная скорость некоторой точки А в м/с; _ va – длина отрезка на чертеже в мм, изображающего данную скорость.
где KV – масштаб скоростей; VA – истинная скорость некоторой точки А в м/с; _ va – длина отрезка на чертеже в мм, изображающего данную скорость. Чертеж, представляющий собой ряд последовательных положений звеньев механизма, соответствующих полному циклу его движения, называют планом положений механизма. Обычно при графическом методе рассматривается 12 положений механизма. Непрерывные линии, соединяющие на плане последовательные положения одноименных точек, дают траектории движения этих точек.
Чертеж, представляющий собой ряд последовательных положений звеньев механизма, соответствующих полному циклу его движения, называют планом положений механизма. Обычно при графическом методе рассматривается 12 положений механизма. Непрерывные линии, соединяющие на плане последовательные положения одноименных точек, дают траектории движения этих точек. Метод планов скоростей и ускорений относится к графо-аналитическим методам исследования кинематики механизмов. Планом скоростей (ускорений) механизма называют чертеж, на котором скорости (ускорения) различных точек изображены в виде векторов, показывающих направления и величины (в масштабе) этих скоростей (ускорений) в данный момент времени. Абсолютное движение любой точки звена может быть составлено из переносного и относительного. За переносное принимается известное движение какой-либо точки. Относительное - движение данной точки относительно той, движение которой принято за переносное:
Метод планов скоростей и ускорений относится к графо-аналитическим методам исследования кинематики механизмов. Планом скоростей (ускорений) механизма называют чертеж, на котором скорости (ускорения) различных точек изображены в виде векторов, показывающих направления и величины (в масштабе) этих скоростей (ускорений) в данный момент времени. Абсолютное движение любой точки звена может быть составлено из переносного и относительного. За переносное принимается известное движение какой-либо точки. Относительное - движение данной точки относительно той, движение которой принято за переносное:  Этот принцип в равной степени относится к перемещениям, скоростям и ускорениям:
Этот принцип в равной степени относится к перемещениям, скоростям и ускорениям:  Планы скоростей и ускорений обладают следующими свойствами:
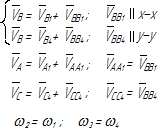
Планы скоростей и ускорений обладают следующими свойствами:  Для примера, нормальное ускорение точки В относительно точки А будет направлено вдоль радиуса ВА к точке А. Тангенциальное – перпендикулярно этому радиусу; 2) звенья соединяются поступательной парой. В этом случае рассматриваются две точки, совпадающие в данный момент времени по своему положению, но принадлежащие разным звеньям – одна ползуну, другая направляющей
Для примера, нормальное ускорение точки В относительно точки А будет направлено вдоль радиуса ВА к точке А. Тангенциальное – перпендикулярно этому радиусу; 2) звенья соединяются поступательной парой. В этом случае рассматриваются две точки, совпадающие в данный момент времени по своему положению, но принадлежащие разным звеньям – одна ползуну, другая направляющей

 Если известен закон движения направляющей 1, то известны характеристики движения любой точки на этом звене, в том числе и точки С1, принадлежащей этой направляющей. Движение точки С1 принимается в качестве переносного. Движение точки С2, принадлежащей ползуну, относительно точки С1 получается за счет поступательного движения ползуна вдоль направляющей (влияние вращательного движения исключается, т.к. радиус вращения равен нулю – положение точек С1 и С2совпадает). При определении ускорений кроме относительного ускорения, направленного вдоль направляющей, возникает кориолисово ускорение. Исследование кинематики механизма методом планов начинается с начального механизма (с входного звена) и далее ведется по группам Ассура в порядке их присоединения к механизму. Для каждой группы Ассура разработаны методы решения (уравнения и порядок построения планов), которые являются неизменными, независимо от того, в каком механизме данная группа Ассура находится. Уравнения планов для групп Ассура второго класса приведены. Кинематический анализ групп Ассура II класса методом планов
Если известен закон движения направляющей 1, то известны характеристики движения любой точки на этом звене, в том числе и точки С1, принадлежащей этой направляющей. Движение точки С1 принимается в качестве переносного. Движение точки С2, принадлежащей ползуну, относительно точки С1 получается за счет поступательного движения ползуна вдоль направляющей (влияние вращательного движения исключается, т.к. радиус вращения равен нулю – положение точек С1 и С2совпадает). При определении ускорений кроме относительного ускорения, направленного вдоль направляющей, возникает кориолисово ускорение. Исследование кинематики механизма методом планов начинается с начального механизма (с входного звена) и далее ведется по группам Ассура в порядке их присоединения к механизму. Для каждой группы Ассура разработаны методы решения (уравнения и порядок построения планов), которые являются неизменными, независимо от того, в каком механизме данная группа Ассура находится. Уравнения планов для групп Ассура второго класса приведены. Кинематический анализ групп Ассура II класса методом планов