|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Силовой расчет ведущего звена механизма. Уравновешивающая сила и уравновешивающий момент.
Задачи обычно решают графоаналитическим методом, используя уравнения равновесия всей группы или отдельных ее звеньев в форме. Силовой расчет ведущего звена. К звену приложены сила Pj = 400 н, сила Р21 = - Ри (ее величина определяется из плана сил отрезком (be)), сила 12 = (be) Ир = 70 20 = 1400 н, сила (реакция) Рц и уравновешивающий момент. Переходим к силовому расчету ведущего звена (водила Н). К водилу Н приложены сила Р = — P j, реакция (воздействие стойки 3 на водило Н), приложенная к оси шарнира Е, и момент Mf. Силовой расчет механизма ведется в порядке, обратном кинематическому исследованию, т. е. сначала ведется расчет последней присоединенной группы Ассура, затем предыдущей и т. д., и, наконец, ведется силовой расчет ведущего звена (кривошипа).Силовой расчет начинается со структурной группы, которая в процессе образования схемы механизма присоединена последней и заканчивается расчетом ведущего звена. При силовом расчете под ведущим звеном понимается звено, к которому приложена искомая уравновешивающая сила или момент. Наиболее удобным методом силового расчета механизмов является метод планов сил. При силовом расчете механизм расчленяется на отдельные группы при этом необходимо придерживаться общеизвестного из статики сооружений положения об установлении порядка расчета, который будет обратным порядку кинематического исследования, т. е. силовой расчет начинается с группы, присоединенной последней в процессе образования механизма, и заканчивается расчетом ведущего звена начального механизма. Если плоский механизм имеет одну степень свободы, то начальный механизм состоит из двух звеньев неподвижного (стойка) и начального звена. Эти звенья образуют либо вращательную кинематическую пару (кривошип — стойка), либо поступательную пару (ползун — направляющие). Звено, к которому приложена уравновешивающая сила Ру, будем считать при силовом расчете начальным звеном механизма. Реакция в начальном вращательном механизме зависит от способа передачи энергии начальному звену источником энергии. Определение давлений в кинематических парах. Определение давлений в кинематических парах механизма начинаем с анализа последней (считая от ведущего звена) присоединенной группы и заканчиваем последовательным переходом от одной группы к другой силовым анализом ведущего звена. Порядок силового расчета проследим на примере определения давлений в кинематических парах в 7-м положении механизма. Уравновешивающая сила- это сила равная по модулю и противоположная по направлению равнодействующей сил. Сначала нужно найти равнодействующую сил. Она равна геометрической сумме сил F 1 и F 2. Для того, чтобы её найти необходимо сложить два вектора F1 и F2. Если вектор F1 направлен вертикально вверх, а вектор F 2 горизонтально, то их сумма будет направлена по диагонали. А численно она будет равна корню квадратному из суммы квадратов F1 и F2. Уравновешивающий момент-? 27. Способ Н.Е. Жуковского для определения уравновешивающей силы. В тех случаях, когда требуется найти только неизвестную внешнюю силу без определения реакций в кинематических парах (например, уравновешивающую силу или момент), удобно воспользоваться методом Жуковского Н.Е., не прибегая к последовательному силовому расчету всего механизма. Метод основан на принципе возможных перемещений – если система находится в равновесии, то сумма работ внешних сил и моментов на малых возможных перемещениях равна нулю ( ∑ Ai = 0). Так как с помощью сил инерции (по принципу Даламбера) механизм приведен в состояние равновесия, то в данном случае принцип возможных перемещений применим.
Рисунок 19
На рисунке 19 изображено некоторое звено, в точке А которого приложена сила F. Скорость VA этой точки изображается на плане скоростей вектором va в масштабе KV. Перенесем силу F в точку " а" плана скоростей, повернув на 900 (в любую сторону). Возьмем формально момент этой повернутой силы относительно полюса плана скоростей:
В результате таким приемом фактически получаем мгновенную мощность, развиваемую силой F. Таким образом для составления уравнения Жуковского прикладывают все силы, действующие на звенья механизма (включая силы инерции), в соответствующие точки плана скоростей, предварительно повернув их на 900. Взяв формально сумму моментов этих повернутых сил относительно полюса плана скоростей, фактически получают уравнение развиваемых ими мощностей. К полученному уравнению добавляют мощности, развиваемые моментами (включая моменты сил инерции). В уравнение Жуковского мощности должны входить с соответствующими знаками (см. рисунок 16 ). В результате таким приемом фактически получаем мгновенную мощность, развиваемую силой F. Примечание: для составления уравнения Жуковского можно на повернутый (на 900) план скоростей прикладывать силы в своем истинном направлении. 28. Динамическая модель механизма. Приведение сил и масс в машинах. Прямая задача динамики (силовой анализ механизма) – определение действующих на звенья механизма сил, а также реакций в кинематических парах по заданному закону движения входного звена механизма и заданным активным силам, действующим на его звенья. Обратная задача динамики – определение истинного закона движения звеньев механизма по заданным силам, приложенным к механизму. Задача динамического синтеза состоят в рациональном выборе параметров машины, обеспечивавших уменьшение нагрузок и динамических ошибок, т.е. отклонений истинного закона движения от требуемого. При решении этих задач будем рассматривать механизмы с жесткими звеньями и с одной степенью подвижности, а силы, действующие на механизм, считаем известными в каждом положении механизма. Для механизмов с одной степенью подвижности наиболее простое решение получается с использованием уравнения движения машина в виде уравнения изменения кинетической энергии: Т – Т0 = Σ А, То есть приращение кинетической энергии механизма, при переходе из начального положения в рассматриваемое, равно сумме работ всех внешних сил, действующих на звенья механизма, на перемещении точек их приложения. При этом Σ А = АДВ + АС + АG, где АДВ – работа сил движущих (АДВ > 0); АС – работа сил сопротивления (АС < 0); АG – работа сил тяжести. В общем случае пользоваться уравнением сложно, так как механизм может иметь много звеньев с различными массами и скоростями: на звенья действуют различные силы. Для механизмов с одной степенью подвижности удобно использовать жесткую динамическую модель механизма. При исследовании этой модели принимают следующие допущения: все звенья считаются абсолютно твердыми; жидкости – несжимаемы; кинематические пары недеформируемые. Зазоры в парах отсутствуют. С помощью жесткой модели решаются многие задачи динамического исследования, однако эта модель, как и все другие, не является всеобще. Результаты расчета скоростей и ускорений звеньев и динамических нагрузок могут существенно отличаться от фактических, если частота возмущающего воздействия близка или выше собственной частоты колебаний системы. Однако эти эффекты невозможно выявить в жесткой динамической модели. В дальнейшем рассмотрены механизмы с жесткими звеньями.
Динамические модели механизма с жесткими звеньями. а - механизм, б и в – динамические модели механизма. а изображена кинематическая схема кривошипно-ползунного рычажного механизма с жесткими звеньями и одной степенью свободы. Движение всех звеньев такого механизма полностью определяется законом движения φ, ω, ε начального звена ОА, где φ – угол поворота; ω – угловая скорость, ε - угловое ускорение начального звена. Для отыскания этого закона движения с учетом сил FC и MC, действующих на механизм, используют одну из двух динамических моделей. Инерционные характеристики динамической модели определяются из условия равенства кинетических энергий реальной системы и ее модели. В динамической модели с приведенной массой (см. рис. 8.1, б) масса всех звеньев механизма заменяется одной приведенной массой mпр, сосредоточенной в точке А звена приведения ОА. Звено ОА в динамической модели рассматривается как жесткое безинерционное. Силы и моменты FC и MC, действующие на механизм, заменяются приведенными силами, приложенными к точке приведения А перпендикулярно звену ОА. Таким образом, движение точки приведения определяется законом движения приведенной массы под действием приведенных сил. в представлена динамическая модель, в которой массы всех звеньев заменяется приведенным моментом инерции Iпр диска, жестко связанного со звеном ОА. Силы, действующие на механизм в этом случае, заменяются приведенными моментами сил Мпр.с и Мпр.д. При использовании обеих динамических моделей результаты расчета закона движения звена приведения будут одинаковы, поэтому жесткие динамические модели с приведенной массой и с приведенным моментом инерции эквивалентны. При составлении динамических моделей механических систем удобно массы и моменты инерции различных звеньев, соединенных кинематическими связями, заменить одной приведенной массой (моментом инерции). К этой массе прикладываются приведенные силы, эквивалентные силам, действующим на приводимые звенья. Если рассматривается жесткая модель механизма с одной степенью подвижности, то для его изучения достаточно знать закон движения одного из звеньев, как правило, начального. Динамическая модель такого механизма показана. Звено механизма, к которому приведены массы (моменты инерции) на динамические модели, называется звеном приведения сил и масс. Точки сосредоточения приведенных масс – точки приведения. Приведенной массой называется такая условная масса, сосредоточенная в точке приведения, кинетическая энергия Тпр которойравна сумме
Согласно определению приведенная масса
Vк – скорость точки k; α к –угол между векторами
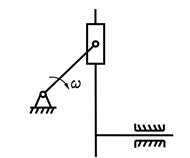
Синусный механизм. 29.Приведенная сила. Приведенный момент. Приведенной силой (моментом) называют условную силу (момент), которая, будучи приложена к звену приведения, развивает мощность N, равную мощности приводимых сил и моментов. Величина приведенной силы, направленной по скорости точки приведения, равна
Vк – скорость точки k; α к –угол между векторами |
Последнее изменение этой страницы: 2017-04-13; Просмотров: 2300; Нарушение авторского права страницы
 Перейдем к конкретному мгновенному положению механизма, разделив все члены на бесконечно малый промежуток времени (dt), за который происходят указанные малые перемещения:
Перейдем к конкретному мгновенному положению механизма, разделив все члены на бесконечно малый промежуток времени (dt), за который происходят указанные малые перемещения:  Таким образом, уравнение работ трансформируется в уравнение мгновенных мощностей и принцип возможных перемещений в применении к механизму можно сформулировать следующим образом – если механизм находится в равновесии, то сумма мгновенных мощностей всех внешних сил и моментов, приложенных к звеньям механизма, равна нулю. Жуковским Н.Е. был предложен метод составления этого уравнения с использованием плана скоростей (рисунок 19).
Таким образом, уравнение работ трансформируется в уравнение мгновенных мощностей и принцип возможных перемещений в применении к механизму можно сформулировать следующим образом – если механизм находится в равновесии, то сумма мгновенных мощностей всех внешних сил и моментов, приложенных к звеньям механизма, равна нулю. Жуковским Н.Е. был предложен метод составления этого уравнения с использованием плана скоростей (рисунок 19).

 кинетических энергий приводимых звеньев. Кинетическая энергия Тi i-го звена и приведенной массы Тпр соответственно равны
кинетических энергий приводимых звеньев. Кинетическая энергия Тi i-го звена и приведенной массы Тпр соответственно равны ;
;  .
. . Если массы звеньев приводятся к эвену, вращающемуся вокруг неподвижной оси, то удобнее пользоваться понятием приведенного момента инерции Inp этих масс относительно оси вращения звена приведения
. Если массы звеньев приводятся к эвену, вращающемуся вокруг неподвижной оси, то удобнее пользоваться понятием приведенного момента инерции Inp этих масс относительно оси вращения звена приведения , где mi, IS i – масса и осевой момент инерции относительно оси, проходящей через центр масс i-го звена; VS i, ω i – соответственно скорость масс i-го звена и угловая скорость i -го звена; VA – скорость точки приведения; ω ОА – угловая скорость звена приведения. Приведенной силой (моментом) называют условную силу (момент), которая, будучи приложена к звену приведения, развивает мощность N, равную мощности приводимых сил и моментов. Величина приведенной силы, направленной по скорости точки приведения, равна
, где mi, IS i – масса и осевой момент инерции относительно оси, проходящей через центр масс i-го звена; VS i, ω i – соответственно скорость масс i-го звена и угловая скорость i -го звена; VA – скорость точки приведения; ω ОА – угловая скорость звена приведения. Приведенной силой (моментом) называют условную силу (момент), которая, будучи приложена к звену приведения, развивает мощность N, равную мощности приводимых сил и моментов. Величина приведенной силы, направленной по скорости точки приведения, равна Приведенный момент силы равен
Приведенный момент силы равен где Fк– величина приводимой силы, приложенной в точке к механизма;
где Fк– величина приводимой силы, приложенной в точке к механизма;  ,
,  ; Мк – момент, приложенный к звену k; ω k – угловая скорость k -го звена. Из формул следует, что приведенная масса и приведенная сила зависят от отношения квадратов скоростей приводимых звеньев к квадрату скорости звена приведения. Известно, что отношение скоростей определяется только соотношением длин звеньев механизма и обобщенной координатой равной угловой координате φ звена приведения ОА. Таким образом, приведенная сила и приведенная масса являются функцией обобщенной координаты φ. Пример: На рисунке представлен синусный механизм. При движении ползуна вправо на него действует постоянная сила сопротивления Fс, направленная влево. Построить графики F пр.с и mпр, учитывая только массу ползуна.
; Мк – момент, приложенный к звену k; ω k – угловая скорость k -го звена. Из формул следует, что приведенная масса и приведенная сила зависят от отношения квадратов скоростей приводимых звеньев к квадрату скорости звена приведения. Известно, что отношение скоростей определяется только соотношением длин звеньев механизма и обобщенной координатой равной угловой координате φ звена приведения ОА. Таким образом, приведенная сила и приведенная масса являются функцией обобщенной координаты φ. Пример: На рисунке представлен синусный механизм. При движении ползуна вправо на него действует постоянная сила сопротивления Fс, направленная влево. Построить графики F пр.с и mпр, учитывая только массу ползуна.