|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Архитектура современных систем ЧПУСтр 1 из 7Следующая ⇒
Лекция 2 ЛЕКЦИЯ №3 Станок как объект управления устройства ЧПУ
Лекция 4 Лекция 5 Характеризация систем ЧПУ системного уровня и осей 1. Назначение характеризации. УЧПУ фирмы БАЛТ систем представляют собой промышленный компьютер, имеющий набор периферийных модулей для управления станками. Для подготовки такого компьютера с конкретным станком необходимо выполнить установку параметров и характеристик управляемого оборудования, так же аппаратных и программных модулей самого промышленного компьютера, т.е. необходимо выполнить характеризацию. Характеризация осуществляется через запись указанных параметров файлов характеризации. После завершения характеризации УЧПУ не способно управлять конкретным оборудованием, поскольку не составлена программа логики станка. Характеризация УЧПУ имеет 2 уровня: системный и функциональный. Системный является приоритетным по отношению к функциональному и выполняется в первую очередь. Системный уровень выполняет установку параметров, определяющих доступ к физически существующим рабочим каталогам, расположенных на любом из используемых дисковых устройств памяти (Flash диск, HDD, FDD). Функциональный уровень устанавливает параметры, которые задают конкретные функции УЧПУ, этим ориентируют его на управление определенным тех. процессом (рис. 5. 1).
Рис.5.1. Связь между уровнями и файлами характеризации
2. Характеризация системного уровня. Файл FCRSYS создается при первом включении УЧПУ, его можно создать повторно или отредактировать повторно любым редактором УЧПУ в кодировке ASCII. Файл FCRSYS расположен по адресу C: \CNC\MP0 (C: \CNC32\MP0). Стандартный файл FCRSYS приведен в методических указаниях. Секция №1. Объявляет соответствие между логическим именем памяти УЧПУ и путем доступа физически существующему каталогу DOS. УЧПУ используют формат памяти PO0 – MP6, которым могут соответствовать любые дисковые каталоги на любом дисковом устройстве. Секция №2. Файлы секционного типа. Содержит логические имена файлов функционального назначения и технологического процесса. В памяти УЧПУ содержится таблица постоянных логических имен (до 15), которые пользователь не может изменять. Через запятую справа от постоянного логического имени файла пользователь должен записать имя своего файла и место его размещения. Соответствие между постоянными логическими именами файлов ПРО УЧПУ и имена файлов, создаваемых пользователем и их функциональных назначениях представлена в таблице (методич. указания, табл. 5.1.)
Имена постоянных логических файлов пользователя
3. Характеризация осей. ПРО управления осями, выполняемая ЦПУ выполняет 2 следующие задачи: интерполяцию осей и управление приводом осей. Секция № 1. Файла AXCFIL содержит инструкции, относящиеся к характеризации ЦПУ и объявлению осей процесса. Инструкции: NBP – объявление количества процессов. TIM – определяет ТИК базового ЦПУ УЧПУ. PRO – предназначена для объявления номера текущего характеризуемого процесса. INn – содержит параметры характеризации интерполятора. CAS – содержит параметры характеризации управления приводом осей. Секция №2. Включает в себя инструкции, управляемых от УЧПУ осей. NAS – определение осей текущего процесса. TPA – определение типа оси. NTC – предназначена для определения номера датчики обратной связи и ЦАП. RAP – установка параметров скорости/ускорения для текущей характеризуемой оси. GAS- определяет зазор оси и мертвую зону. PAS- устанавливает электрический и механический шаг текущей характеризуемой оси. MCZ- используется для установки параметров выхода в позицию микро нуля для текущей характеризуемой оси. POS- устанавливает параметры допуска позиционирования для текущей характеризуемой оси. SRV-устанавливает значение ошибок привода для текущей характеризуемой оси. MAN- используется для определения параметров скорости и ускорения в режиме ручного ускорения. GMnn- определяет параметры скорости быстрого хода и коэффициент усиления для текущей характеризуемой оси. Секция №3. Содержит инструкции, относящиеся к коррекции геометрических ошибок. Фторируемые значения геометрических ошибок записываются в память. PAS- задает шаг коррекции (с какой частотой будут располагаться точки). Exxx- определяет значение ошибки между значением считанным с датчика и реальной позицией оси. NM0- объявляет номер корректора соответствующее опорной точке (позиции микро нуля).
Лекция Лекция Язык PLC. Основным элементом языка является команда, по средствам которой можно выполнять определенную функцию. Команда состоит из элементов языка, составляемых по определенным правилам. Элементы языка делятся на 4 группы: операнды, метаоперанды, функции, операторы. Операнды – часть языка, содержащая обрабатываемую информацию. В состав языка входят операнды типа сигнал и слово. Под словом операнд понимаются так же константы. В пределах разъема сигналы имеют сплошную нумерацию от 0 до 31, слова – от 0 до 3. Например, I1A16 – представляет собой входной сигнал (I) физического разъема с номером 1, номер сигнала – 16. Пример слова – W1A0 – w- это слово; 1 - номер разъема; 0 - номер группы. Кроме элементарных операндов имеются сложные операнды или метаоперанды. К ним относятся таймеры, счетчики, одновибраторы, компараторы. Имеется 48 длительных таймеров, которые могут быть запрограммированы на время от 10/10с до 255/10с. С функциональной точки зрения представляет собой элемент, определяемый входом, с задержкой счета и импульсным выходом. Y- сигнал таймера может принимать следующие значения: I – входной сигнал, A – разрешающий, U – выходной, D- реверсивный. Пример задания длительного таймера на 10с: T00I(00)=/U200K0 Короткого таймера на 2, 5 T48I(250)=/U200K0 Существуют 100 счетчиков с модулями счета от 200 до 250. Функциональный счетчик обеспечивает счет импульсов, поступающих на его вход. Типовым применением счетчиков мб счет этапов при смене инструментов, управлением вкл/выкл какого-либо механизма станка одним и тем же сигналом. Счетчик обозначается Cхху хх-номер счетчика (0-99) y-тип обрабатываемого сигнала I-входной сигнал, R-сигнал переноса, Z-сброс, А-метод счета, W-слово содержащее величину счета. Пример управления вкл/выкл какого-либо механизма станка импульсным сигналом I2N0 приведен: C3I (2) =I2N0 U4A3 =[C3W=1] Существуют 100 одновибраторов, они определяются символом Pxx, xx-номер одновибратора (0-99). Сигнал активизируется по переднему фронту, остается на уровне лог. 1 в течении 1 цикла медленной части логики, при этом он не подвергается никаким изменениям. Компаратор предназначен для сравнения 2 слов, результатом мб истина или ложь, сравниваемые слова word1, word2 представляют ввиде Wxxxyzz, одно из сравниваемых слов мб представлена значением константы в формате zzzy. Операции использования компараторов: [WORD> zzzy] [WORD=zzzy] [WORD< zzzy] U123K12=/[W15K1=W13T3] Лекция Подготовка программы логики(ПЛ) для станка с ЧПУ Описание объекта управления станка: Необходимо составить ПЛ для управления автоматической коробкой скоростей (АКС), металлорежущего станка с ЧПУ Балт систем. Исходные данные электрической принципиальной схемы (рис. 8.1-8.3)
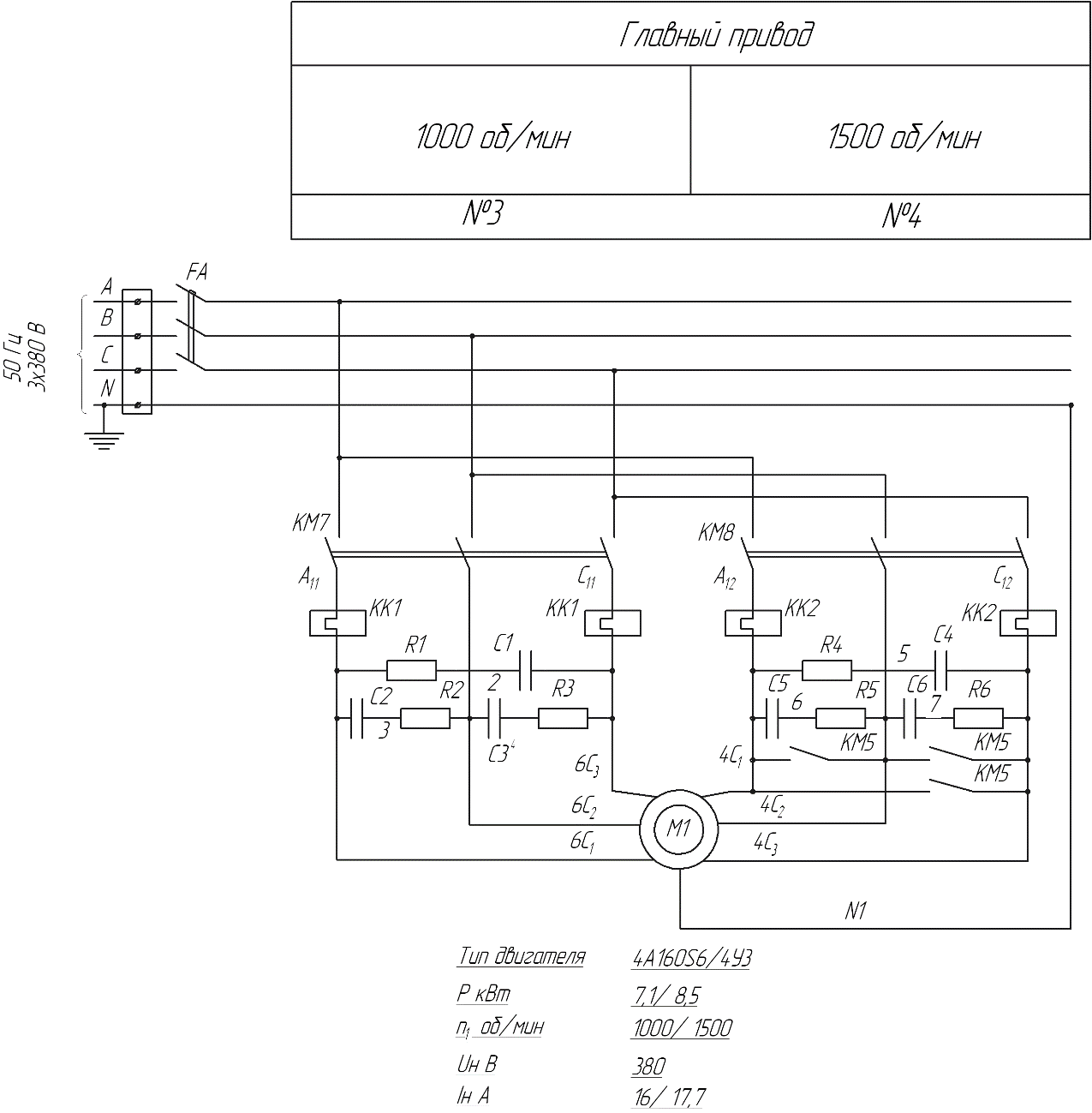
Рис.8.1. Электрическая схема силовой части ПГД: FA – вводной выключатель; М1 – приводной трехфазный асинхронный двухскоростной электродвигатель; KM7, KM8 – контакты контактора (коммутационная часть); КК1, КК2 – тепловые реле
Рис. 8.2. Электрическая схема управления диапазонами ПГД
Рис. 8.3. Электрическая схема управления диапазонами ПГД: YC1-YC6 – электромагнитные муфты АКС
Электрическая схема силовой части ПГД: FA – вводной выключатель; М1 – приводной трехфазный асинхронный двухскоростной электродвигатель; KM7, KM8 – контакты контактора (коммутационная часть); КК1, КК2 – тепловые реле. С частотой вращения 1000 и 1500, защиту от тепловой перегрузки двигателя обеспечивает тепловое реле. Защита от одновременного вращения, включ-ся 2х частот обеспеч-ют контакты реле KM5, RC- служит для рассеив-я энергии электродвигателя в режиме динамич тормож-я. Верхние части схемы указаны номера зоны облег-х поиск элементов. На рис8.2 схема управления диапазонами частот вращ-я привода глав-го движ-я, при подаче выход сигнала программа логики U4А4(N174) при отсутствии сигнала U4А6 катушка реле КМ5 получ-ет питание 110 В перемен. тока, замык-ся контакты реле КМ5, катушка контактера КМ7(N177) и при замк выключ-ле FA 380 В подется на обмотку электродвиг включая частоту 1000 об\мин, при этом норм замкнут контакты КМ7(N178) замык-ся блокир-я 2 ю частоту, включ-е 2 частоты невозможно.при снятии выход-го сигнала U4А4 и включ-ии сигнала U4А6 катушка реле КМ8, зоны 178 получ-ет питание 110В переменного тока, норм замкнут контакты КМ8(N176, N177) размык-ся блокирую 1 частоту (1000об\мин), а норм разомк-е контакты КМ8 замыкаются 380В подается на обмотку эл.двигателя, включая частоту 1500 об\мин. Схема ступенчатого управл-я скоростями представлена на рис 8.3. Таблица 8.1 показ-ет состояние электромагнит муфт для каждой из скоростей. Таблица 8.1 Таблица включения электромагнитных муфт АКС
Составление ПЛ для акс станка с чпу В ПЛ исполь-ся след-е операнды 1)выводные сигналы U111K3, U111K4 U111K5 M3 по час M4против час M5 стоп 2)U10K20 (ASPEPN) при аварии блокир-ся любые движ. приводов. Разрешение включ-я управляющего напряж-я на станке.реле SPEPN 3)выходные сигналы U36K1-U36K12-S1-S12 технологические команды S7 M3-включ-е частоты 7 по часовой стреле, S10 V4 -включ-е частоты 10 против час стрелке 4) U4A3, U4A4, U4A7-U4A11, U4A23 стр33-34 в таблице эксплуатации-для управ-я сигналов-лаба№1 5) I0K1(rese)-входной сигнал процесс состоянии сброс. 6) W3K0-импульсные функции М Блок включения частот S1-S12(прямое вращение) выполняется на основе анализа электрич принципиальной схемы станка. Нечетные частоты соотв диапазону 1000об.мин, четные-1500 об.мин. В блоке S1-S6(обратное вращение) обеспечивается 6 частот привода главного движения.
КОД ПРОГРАММЫ ЛОГИКИ: ; U11K16=I0K2/ GAMM1 CONP /первый диапазон ЧВШ; процесс готовый обсуживание осей U111k3=[w3k0=3]+U111K3*/[W3KO=4]*/[W3KO=5]*/U111K4/U111K5*/I0K1 (U111K3-U111K5-ПАМЯТИ) U111K4=[W3K0=4]+UIIIK4*/[W3K0=3]*/[W3K0=5]*/U111K3/U111K5*I0K1 U111K5=[W3K0=5]+U111K5*/U111K4*/U111K5 U11K3=U111K3-ROMAO U11K4=U111K4-ROMAA DOF: [W8K0> 0] ASPEPN(разрешение вкл напряж на станке) V36K1=[W8K0=1H]*U10K20 память S1 V36K2=[W8K0=2H]*U10K20 память S2 V36K3=[W8K0=3H]*U10K20 …………….. U36K12=[W8KO=12H]*U10K20 ENDF ; установка скорости DOF M3: U111K3*/U111K4*/U111K5 U4A3=U36K3+U36K4+U36K9+U36K10 (YC2) U4A11=U36K1+U36K2+U36K3+U36K4+U36K5+U36K6 (YC6) U4A8=U36K1+U36K2+U36K7+U36K8(YC3) U4A7=U36K5+U36K6+U36K11+U36K12(YC1) U4A10=U36K7+U36K8+U36K9+U36K10+U36K11+U36K12)YC4) ; нечетные (1000 об/мин) U4A4=(U36K1+U36K3+U36K5+U36K7+U36K9+U36K11)*/U4A6 ; четные (1500 об/мин) U4A6=(U36K2+U36K4+U36K6+U36K8+U36K10+U36K12)*/U4A4 ; РЕВЕРС ШПИНДЕЛЯ DOF M4: U111K4*/U111K3*/U111K5 U4A7=U36K5+U36K6 (YC1) U4A8=U36K1+U36K2( YC3) U4A9=U36K3+U36K4(YC2) U4A11=U36K1+U36K2+U36K3+U36K4+U36K5+U36K6(YC6) ; НЕЧЕТНЫЕ U4A4=(U36K1+U36K3+U36K5)*/U4A6 ; ЧЕТНЫЕ U4A6=(U36K2+U36K4+U36K6)*/U4A4 ENDF M4 ; ОСТАНОВКА ШПИНДЕЛЯ DOF M5: U111K5*/U111K3*/U111K4 U4A4=/U111K5 U4A6=/U111K5 U4A23=U111K5*/U111K3*/U111K4 (YC3) U4A9=/U111K5(YC3) U4A11=/U111K5(YC6) U4A8=/U111K5(YC2) U4A7=/U111K5(YC1) U4A10=/U111K5(YC4) ENDF M5 ЛЕКЦИЯ № 9 Mdi(РУЧНОЙ ВВОД КАДРА), Auto(автомат отработка УП), HOME(режим выход в 0), RESET(режим сброс) Диагностика вх вых сигналов учпу дебаг самост
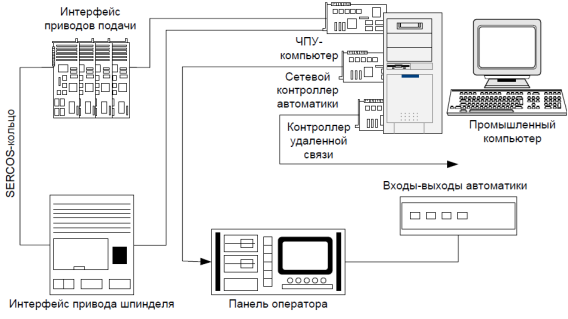
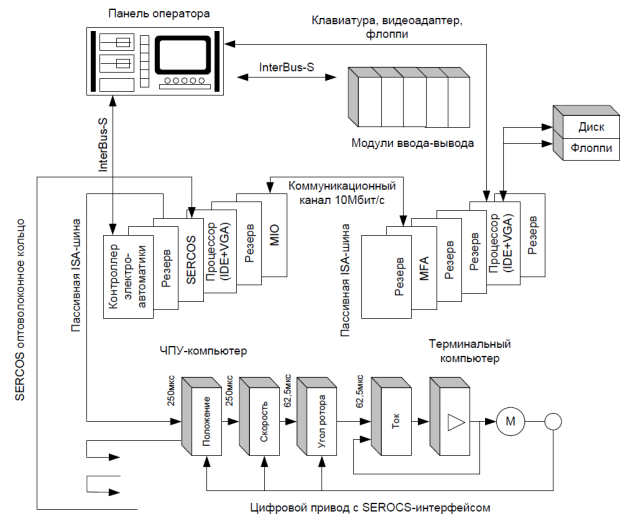
ЛЕКЦИЯ № 14 Лекция 2 Архитектура современных систем ЧПУ Классификация систем ЧПУ Разработчики современных систем ЧПУ(СЧПУ) выделяют 5 архитектур: Классические системы – CNC (Computer Numerical Control). Такие системы выпускаются фирмами с богатой традицией производство, высококачественной собственной микроэлектронной аппаратурой, однако эти фирмы под влиянием пользователей тех. Оборудования, желающих иметь гибкий интерфейс оператора, предлагают модификацию PCNC-1 с ПК в качестве терминала. Следующим шагом в развитии ЧПУ стало PCNC-2 (2х компьютерного варианта). Позднее появились системы PCNC-3, ядро которых реализовано на отдельной плате, устанавливаемой в корпусе промышленного ПК. В настоящее время все большее распространение получает одно компьютерный вариант системы PCNC-4. Системы типа PCNC-1, PCNC-2 К ним относятся семейства NUM(Schneider)Рис. Архитектура СЧПУ Построенная по принципу многопроцессорных СЧПУ: с ЧПУ процессором, с процессором программируемого контроля автоматики и графическим процессором. Система NUM оснащается пассивным терминалом или промышленным компьютером с ОС (операционной системой)- Win98. Семейство представлено компактными модульными версиями, которые различаются числом координат и возможностью формировать независимые каналы ЧПУ из координатных групп, а также использованием традиционных аналоговых или автономных цифровых следящих приводов, подключенных к оптоволоконной сети. В зависимости от требований устанавливается различное число входов и выходов автоматики. Вычислительная мощность таких систем достаточно высока, этим объясняется широкий набор их функциональных возможностей. Предусмотрены сплайновый и полиноминальный алгоритмы интерполяции, 5ти координатная коррекция инструмента, одновременная работа по 2м различным управляющим программам, 3Д графика. В системах с терминальным компьютером возможна адаптация интерфейса оператора с опросом конечных пользователей и диалоговое программирование. Фирма Allen Bradley выпускает широкое семейство СЧПУ: от традиционной CNC до систем CNC с ПК в качестве терминала и системы класса PCNC. Последняя модель (рис.2) выполнена по классической схеме: Рис.2. Архитектура СЧПУ типа PCNC-1 фирмы Allen-Bradley специализированный промышленный компьютер с ОС Windows NT и возможность разработки пользовательских приложений на языке Visual Basic, PCI- одноплатный ЧПУ компьютер, выполняющий все функции ядра, включая програмнореализованный контролер электроавтоматики, с помощью общего для всей системы терминала осуществляется программирование и редактирование контролера. Системы типа PCNC-2 Система ЧПУ фирмы ANDRON представляет собой полный двух компьютерный вариант, ее структура представляет собой набор модулей (рис. 3): терминального компьютера (устройство ввода/вывода), ЧПУ компьютера, панели оператора и монитора, удаленных входов/выходов программируемого контролера. Одной или нескольких цифровых приводов подачи (SERCOS) и главного привода, аппаратная часть системы практически полностью состоит из компонент других фирм производителей. В состав терминального компа входит: материнская плата с процессором Intel Celeron, интегрируемыми контролерами SCSI, VGA, TFT, IDE, MFA с памятью CMOS-ROM, контролера коммуникационного канала, связывающий терминальный и ЧПУ компьютеры, плата установлена на пассивной ISA шине. Для специальных задач возможна установка PCI плат.
Рис. 3 В составе ЧПУ компьютера имеются: материнская плата с процессором Intel Celeron, платы MIO (Main Input Output), как коммуникационного интерфейса с терминальным компьютером со скоростью 10 Мбит/с, так и интерфейс ручного перемещения. Плата программируемого контролера с интерфейсом InterBus-S (с циклом 4мсек для 1024 входов/выходов); Одна или несколько плат SERCOS интерфейса, все платы установлены на пассивной ISA шине. Каждый SERCOS интерфейс обслуживает одну группу из 3х автономных приводов подачи и 1 привода шпинделя. В подобных платформах СЧПУ терминальный компьютер обычно работает под управление операционной системы Windows NT, ЧПУ компьютер оснащается системой жесткого реального времени.
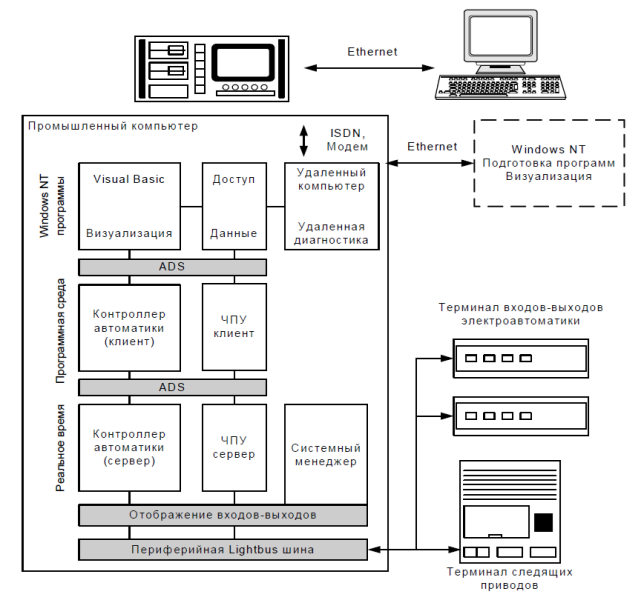
Системы типа PCNC-3 Типичный представитель –фирма DeltaTau, архитектура такой системы предполагает наличие 2х компьютеров, в отличие от предыдущего типа систем ЧПУ компьютер выполнен ввиде отдельной платы PMAC, Устанавливаемой на ISA или PCI шине терминального ПК (рис.4). Одноплатный ЧПУ компьютер PMAC, построенный на процессоре Motorola56300 решает геометрическую и логическую задачи, выполняя функции интерполятора, контролера управления привода, программно-реализованного контролера электроавтоматики(ЭА). Интерполятор обеспечивает все виды интерполяции: алгоритма, разгона и торможения, опережающий просмотр кадров функция Look Ahead, циклическое формирование управляющих воздействий 440мкс. Контролер приводов поддерживает управление 32 координатными осями, сгруппированные в 16 координатных систем. Помимо этого, он принимает и обрабатывает сигналы обратной связи от датчиков положения замыкает позиционные контуры, выполняет функции Пи-регулятора, имитирует в цифровом виде обратные сигналы по скорости, вырабатывает широтно-импульсный сигнал для приводов подачи и сигнал задания +-10В. Системы типа PCNC-4 Концепция системы ЧПУ Beckhoff является примером одно компьютерной архитектуры PCNC. Отличительная особенность в том, что все задачи управления (геометрическая, логическая, терминальная), решены программным путем без какой-либо аппаратной поддержки (рис.5).
Внешний интерфейс такой системы строится на базе любой стандартной шины, в частности на базе шины LightBus.Она представляет собой кольцевой канал для передачи сигналов управления автономными следящими приводами, а также для передачи сигналов электроавтоматики. Доступ к объектам осущ с помощью периферийных терминалов ввода-вывода. Операционная среда представляет собой комбинацию WindowsNT для поддержания процессов машинного времени и системы TwinCat. ОС фирмы Beckhoff, интегрированная WindowsNT. Добавляет ей функции реального времени, обмен данными и доступ к прикладным функциям API программных модулей, осущ через программную шину ADS.Система TwinCat явл центром системой конфигурации, поддерживающие синхронные или асинхронные взаимодействия всех процессов, а также ввод-вывод сигналов управления.
ЛЕКЦИЯ №3 |
Последнее изменение этой страницы: 2017-04-13; Просмотров: 2402; Нарушение авторского права страницы