|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Понятия интерфейса и язык PLC.
Структура интерфейса PLC: Интерфейс PLC -Программный интерфейс, предназначенный для реализации логики взаимодействия между УЧПУ и управляемым оборудованием. Имеет свой язык, на котором составляется программа логики управляемого оборудования. Обеспечивает взаимодействие базового ПрО ЧПУ программы логики(ПЛ), используя при этом конкретные алгоритмы. Функционирование интерфейса обеспечивают сигналы, сгруппированные в 4 пакета. Каждый пакет имеет 4 структура и свое назначение. Каждый пакет разбит на разъемы по 32 сигнала каждый. А - физический пакет 32 разъема (00А-31А) Т – логически пакет 16 разъемов(00Т-15Т) К - логический 256(000К-255К) N - логический 256(00N-255N) Физическим сигналам на входах выходах соответствует напряжение постоянного тока +24В. За входными сигналами закреплены разъемы 00-03, 08-11, 16-19, а за выходными – 04-06, 12, 13, 20, 21. Номера разъемов дискретных входов/выходов, закрепленных за УЧПУ должны быть объявлены в первой секции файла IOCFIL. Сигналы, представляющие собой константы, относятся к пакету T. Сигналы пакета – это 64 записи или 512 внутренних сигналов, зарезервированных за пользователем для записи информации, сохраняющийся при отключении УЧПУ. Запись значений для этих сигналов может быть осуществлена через четвертую секцию файла характеризации IOCFIL. Сигналы, представляющие собой рабочую память ПЛ, относятся к пакетам K, N. Определенная часть этих сигналов имеет специальное назначение, поскольку при активном состоянии выполняет определенный диалог между базовым ПРО и ПЛ. Связь между модулями ПРО и PLC. PL представляет собой описания на заявке PLC, аппаратные схемы отдельные ветви который активны в интервале времени, зависящем от длительности различных циклов электроавтоматики управляемого оборудования (рис. 7.1-7.2). Обработка команд ПЛ выполнятся центральным процессором устройства УЧПУ, в режиме разделения времени с другими функциями, такими как управления осями, анализ управляющей программы обработки детали, управление заданиями и т.п. Поэтому необходимо предварительно регулировать время исполнения событий, требующих небольшого времени реакции. С этой целью ПЛ подразделяют на две части «быструю» и «медленную». С записью символа $ между ними. Язык PLC. Основным элементом языка является команда, по средствам которой можно выполнять определенную функцию. Команда состоит из элементов языка, составляемых по определенным правилам. Элементы языка делятся на 4 группы: операнды, метаоперанды, функции, операторы. Операнды – часть языка, содержащая обрабатываемую информацию. В состав языка входят операнды типа сигнал и слово. Под словом операнд понимаются так же константы. В пределах разъема сигналы имеют сплошную нумерацию от 0 до 31, слова – от 0 до 3. Например, I1A16 – представляет собой входной сигнал (I) физического разъема с номером 1, номер сигнала – 16. Пример слова – W1A0 – w- это слово; 1 - номер разъема; 0 - номер группы. Кроме элементарных операндов имеются сложные операнды или метаоперанды. К ним относятся таймеры, счетчики, одновибраторы, компараторы. Имеется 48 длительных таймеров, которые могут быть запрограммированы на время от 10/10с до 255/10с. С функциональной точки зрения представляет собой элемент, определяемый входом, с задержкой счета и импульсным выходом. Y- сигнал таймера может принимать следующие значения: I – входной сигнал, A – разрешающий, U – выходной, D- реверсивный. Пример задания длительного таймера на 10с: T00I(00)=/U200K0 Короткого таймера на 2, 5 T48I(250)=/U200K0 Существуют 100 счетчиков с модулями счета от 200 до 250. Функциональный счетчик обеспечивает счет импульсов, поступающих на его вход. Типовым применением счетчиков мб счет этапов при смене инструментов, управлением вкл/выкл какого-либо механизма станка одним и тем же сигналом. Счетчик обозначается Cхху хх-номер счетчика (0-99) y-тип обрабатываемого сигнала I-входной сигнал, R-сигнал переноса, Z-сброс, А-метод счета, W-слово содержащее величину счета. Пример управления вкл/выкл какого-либо механизма станка импульсным сигналом I2N0 приведен: C3I (2) =I2N0 U4A3 =[C3W=1] Существуют 100 одновибраторов, они определяются символом Pxx, xx-номер одновибратора (0-99). Сигнал активизируется по переднему фронту, остается на уровне лог. 1 в течении 1 цикла медленной части логики, при этом он не подвергается никаким изменениям. Компаратор предназначен для сравнения 2 слов, результатом мб истина или ложь, сравниваемые слова word1, word2 представляют ввиде Wxxxyzz, одно из сравниваемых слов мб представлена значением константы в формате zzzy. Операции использования компараторов: [WORD> zzzy] [WORD=zzzy] [WORD< zzzy] U123K12=/[W15K1=W13T3] Лекция Подготовка программы логики(ПЛ) для станка с ЧПУ Описание объекта управления станка: Необходимо составить ПЛ для управления автоматической коробкой скоростей (АКС), металлорежущего станка с ЧПУ Балт систем. Исходные данные электрической принципиальной схемы (рис. 8.1-8.3)
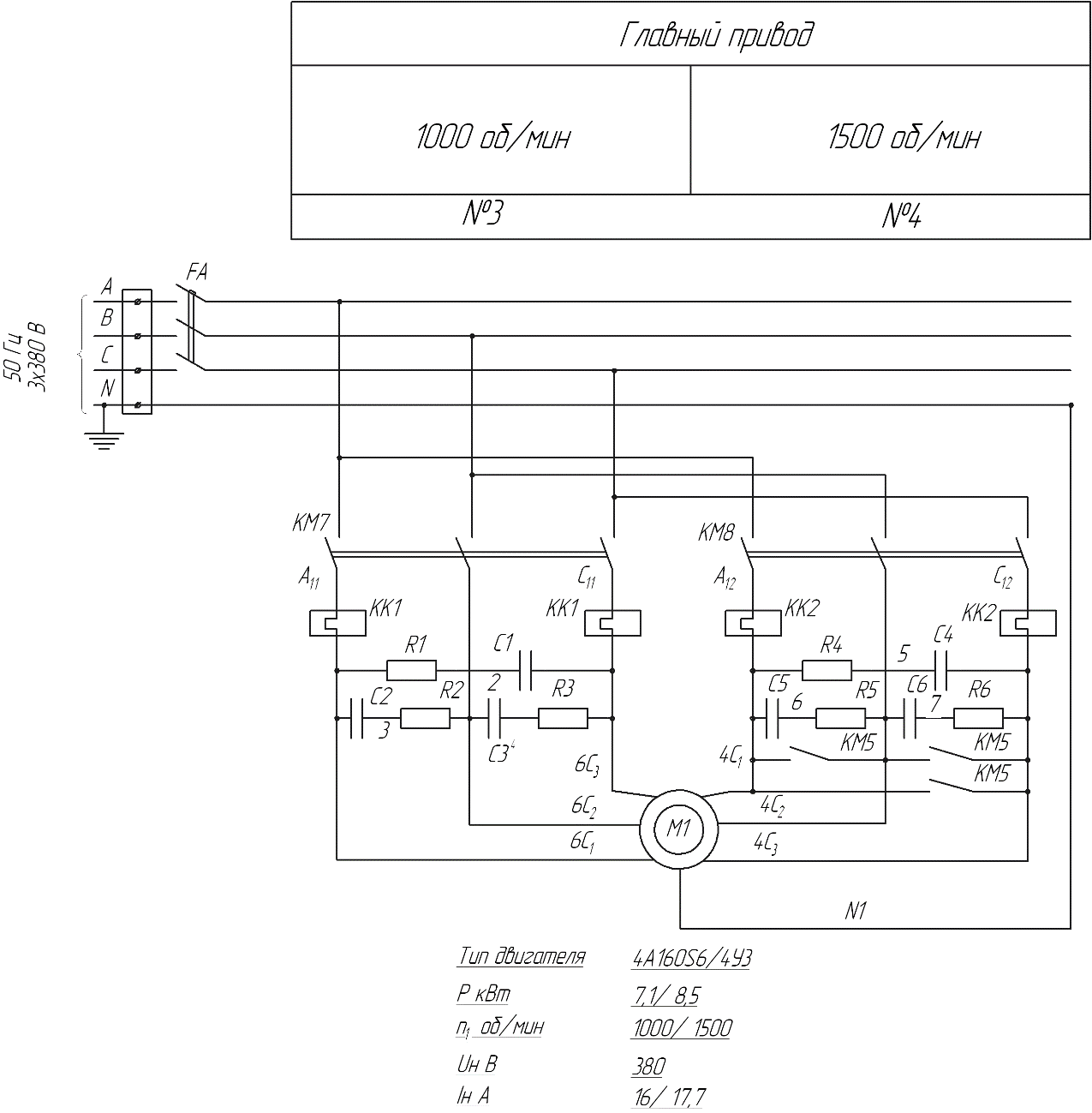
Рис.8.1. Электрическая схема силовой части ПГД: FA – вводной выключатель; М1 – приводной трехфазный асинхронный двухскоростной электродвигатель; KM7, KM8 – контакты контактора (коммутационная часть); КК1, КК2 – тепловые реле
Рис. 8.2. Электрическая схема управления диапазонами ПГД
Рис. 8.3. Электрическая схема управления диапазонами ПГД: YC1-YC6 – электромагнитные муфты АКС
Электрическая схема силовой части ПГД: FA – вводной выключатель; М1 – приводной трехфазный асинхронный двухскоростной электродвигатель; KM7, KM8 – контакты контактора (коммутационная часть); КК1, КК2 – тепловые реле. С частотой вращения 1000 и 1500, защиту от тепловой перегрузки двигателя обеспечивает тепловое реле. Защита от одновременного вращения, включ-ся 2х частот обеспеч-ют контакты реле KM5, RC- служит для рассеив-я энергии электродвигателя в режиме динамич тормож-я. Верхние части схемы указаны номера зоны облег-х поиск элементов. На рис8.2 схема управления диапазонами частот вращ-я привода глав-го движ-я, при подаче выход сигнала программа логики U4А4(N174) при отсутствии сигнала U4А6 катушка реле КМ5 получ-ет питание 110 В перемен. тока, замык-ся контакты реле КМ5, катушка контактера КМ7(N177) и при замк выключ-ле FA 380 В подется на обмотку электродвиг включая частоту 1000 об\мин, при этом норм замкнут контакты КМ7(N178) замык-ся блокир-я 2 ю частоту, включ-е 2 частоты невозможно.при снятии выход-го сигнала U4А4 и включ-ии сигнала U4А6 катушка реле КМ8, зоны 178 получ-ет питание 110В переменного тока, норм замкнут контакты КМ8(N176, N177) размык-ся блокирую 1 частоту (1000об\мин), а норм разомк-е контакты КМ8 замыкаются 380В подается на обмотку эл.двигателя, включая частоту 1500 об\мин. Схема ступенчатого управл-я скоростями представлена на рис 8.3. Таблица 8.1 показ-ет состояние электромагнит муфт для каждой из скоростей. Таблица 8.1 Таблица включения электромагнитных муфт АКС
Составление ПЛ для акс станка с чпу В ПЛ исполь-ся след-е операнды 1)выводные сигналы U111K3, U111K4 U111K5 M3 по час M4против час M5 стоп 2)U10K20 (ASPEPN) при аварии блокир-ся любые движ. приводов. Разрешение включ-я управляющего напряж-я на станке.реле SPEPN 3)выходные сигналы U36K1-U36K12-S1-S12 технологические команды S7 M3-включ-е частоты 7 по часовой стреле, S10 V4 -включ-е частоты 10 против час стрелке 4) U4A3, U4A4, U4A7-U4A11, U4A23 стр33-34 в таблице эксплуатации-для управ-я сигналов-лаба№1 5) I0K1(rese)-входной сигнал процесс состоянии сброс. 6) W3K0-импульсные функции М Блок включения частот S1-S12(прямое вращение) выполняется на основе анализа электрич принципиальной схемы станка. Нечетные частоты соотв диапазону 1000об.мин, четные-1500 об.мин. В блоке S1-S6(обратное вращение) обеспечивается 6 частот привода главного движения.
КОД ПРОГРАММЫ ЛОГИКИ: ; U11K16=I0K2/ GAMM1 CONP /первый диапазон ЧВШ; процесс готовый обсуживание осей U111k3=[w3k0=3]+U111K3*/[W3KO=4]*/[W3KO=5]*/U111K4/U111K5*/I0K1 (U111K3-U111K5-ПАМЯТИ) U111K4=[W3K0=4]+UIIIK4*/[W3K0=3]*/[W3K0=5]*/U111K3/U111K5*I0K1 U111K5=[W3K0=5]+U111K5*/U111K4*/U111K5 U11K3=U111K3-ROMAO U11K4=U111K4-ROMAA DOF: [W8K0> 0] ASPEPN(разрешение вкл напряж на станке) V36K1=[W8K0=1H]*U10K20 память S1 V36K2=[W8K0=2H]*U10K20 память S2 V36K3=[W8K0=3H]*U10K20 …………….. U36K12=[W8KO=12H]*U10K20 ENDF ; установка скорости DOF M3: U111K3*/U111K4*/U111K5 U4A3=U36K3+U36K4+U36K9+U36K10 (YC2) U4A11=U36K1+U36K2+U36K3+U36K4+U36K5+U36K6 (YC6) U4A8=U36K1+U36K2+U36K7+U36K8(YC3) U4A7=U36K5+U36K6+U36K11+U36K12(YC1) U4A10=U36K7+U36K8+U36K9+U36K10+U36K11+U36K12)YC4) ; нечетные (1000 об/мин) U4A4=(U36K1+U36K3+U36K5+U36K7+U36K9+U36K11)*/U4A6 ; четные (1500 об/мин) U4A6=(U36K2+U36K4+U36K6+U36K8+U36K10+U36K12)*/U4A4 ; РЕВЕРС ШПИНДЕЛЯ DOF M4: U111K4*/U111K3*/U111K5 U4A7=U36K5+U36K6 (YC1) U4A8=U36K1+U36K2( YC3) U4A9=U36K3+U36K4(YC2) U4A11=U36K1+U36K2+U36K3+U36K4+U36K5+U36K6(YC6) ; НЕЧЕТНЫЕ U4A4=(U36K1+U36K3+U36K5)*/U4A6 ; ЧЕТНЫЕ U4A6=(U36K2+U36K4+U36K6)*/U4A4 ENDF M4 ; ОСТАНОВКА ШПИНДЕЛЯ DOF M5: U111K5*/U111K3*/U111K4 U4A4=/U111K5 U4A6=/U111K5 U4A23=U111K5*/U111K3*/U111K4 (YC3) U4A9=/U111K5(YC3) U4A11=/U111K5(YC6) U4A8=/U111K5(YC2) U4A7=/U111K5(YC1) U4A10=/U111K5(YC4) ENDF M5 ЛЕКЦИЯ № 9 |
Последнее изменение этой страницы: 2017-04-13; Просмотров: 1189; Нарушение авторского права страницы