|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Электроприводы станков ЧПУ(ЭП)
В станках с ЧПУ ЭП обеспечивают перемещение рабочих органов с целью оптимальной организации тех процессов. По технологическому назначению различают приводы главного движения, подачи и вспомогательных перемещений. Основные требования в ПГД: -широкий диапазон регулирования (отношение мах величины к мин. D, от 200 и более, в том числе с мах мощностью) 1 фото -высокая мощность, крутящий момент -вкл-выкл торможения реверсирования -точность плавность вращения 2 фото -мин потери на трение -высокая надежность -удобство управления -простота и мин стоимость изготовления эксплуатации ЭП ПГД должны обеспечивать время возврата скорости не более 1 с при ступенчатом изменении нагрузки от силы тока холостого хода до номинального значения силы тока, для частоты не ниже номинальной. При этом величина мак динамического снижения скорости должна быть не более 20%, полоса пропускания должна быть не менее 20 Гц. 3 фото Полоса пропускания 4 5 фото Если, а < 0, 707, то полоса пропускания достигнута. Основные требования к приводу подач: -обеспечение требуемых скоростей перемещение рабочего органа -широкий диапазон регулирования -обеспечение тяговой силы -высокие механическая и электромеханическая жесткость привода -использование без зазорных передач (полоса пропускания 30ГЦ-для тиристорных, 100ГЦ- для транзисторных) Являясь одним из узлов станка, ЭП подачи определяет точность и производительность станков с ЧПУ. В связи с тем, что у ЧПУ почти безынерционно формирует сигнал управление приводом, как в режиме движения по заданной траектории, так и в режиме позиционирования, решающее значение для обеспечения точности имеют характеристики и параметра привода подач с учетом особенностей кинематической цепи привода. В настоящее время существуют 3 типа ЭП для механизмов подачи станков с ЧПУ: A. ЭП с высокомоментым ДПТ, имеющими возбуждение от постоянных магнитов. Б. ЭП переменного тока с синхронным двигателем(СД) или вентильными, имеющие роттер с постоянными магнитами. B. ЭП с АД (асинхронным двигателем), имеющим короткозамкнутую обмотку роттера.
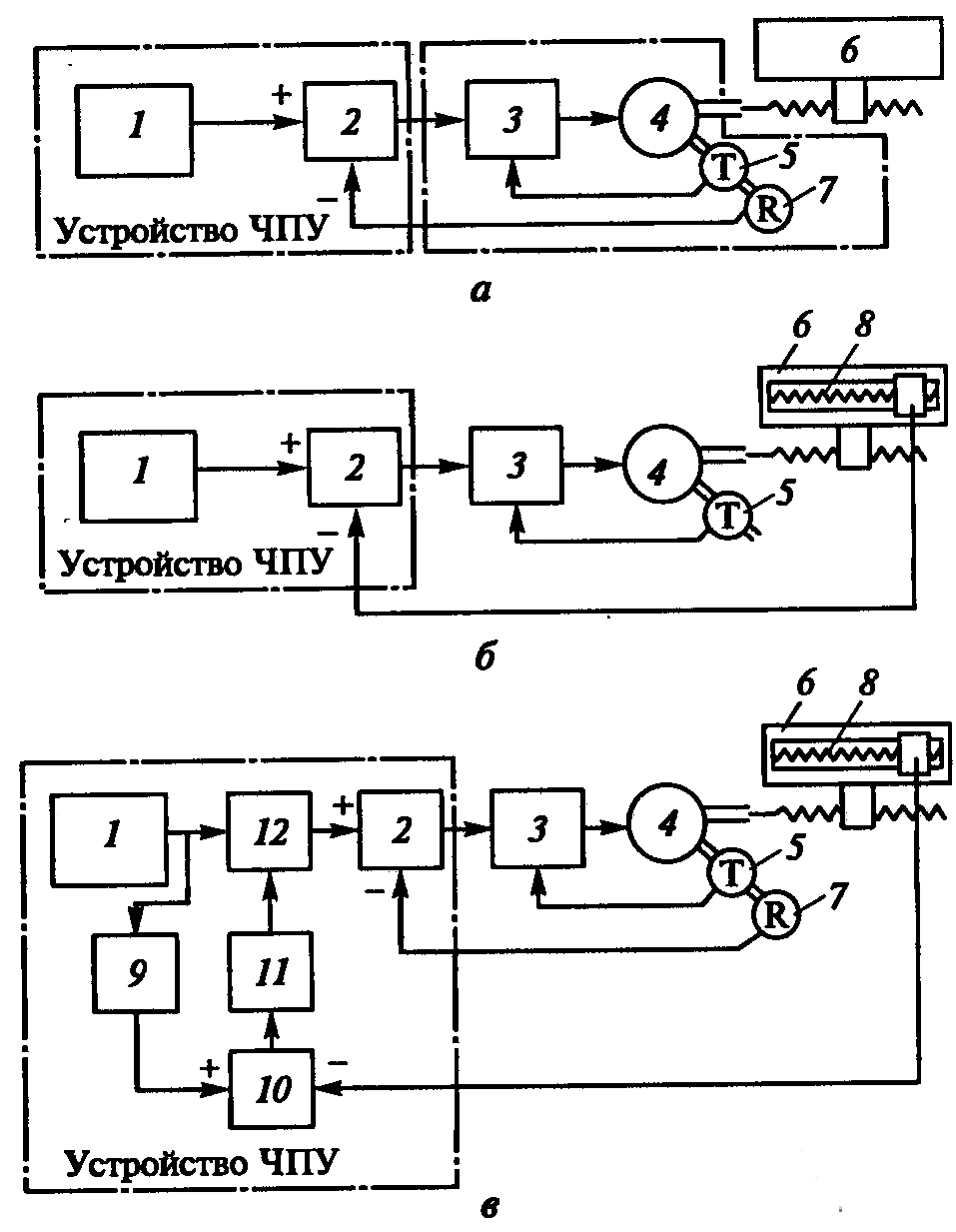
Рис.3.1. Структурные схемы следящих электроприводов: а, б, в – с полузамкнутым, замкнутым и гибридными контурами ОС по пути; 1 – основной блок УЧПУ; 2 – узел управления приводом; 3 – блок привода; 4 – двигатель подачи; 5 – тахогенератор Т; 6 – стол станка; 7 – круговой датчик R обратной связи по пути; 8 – линейный датчик ОС по пути; 9 – задание перемещения; 10 – блок программного или аппаратного сравнения; 11 – задание дополнительного перемещения; 12 – блок суммирования
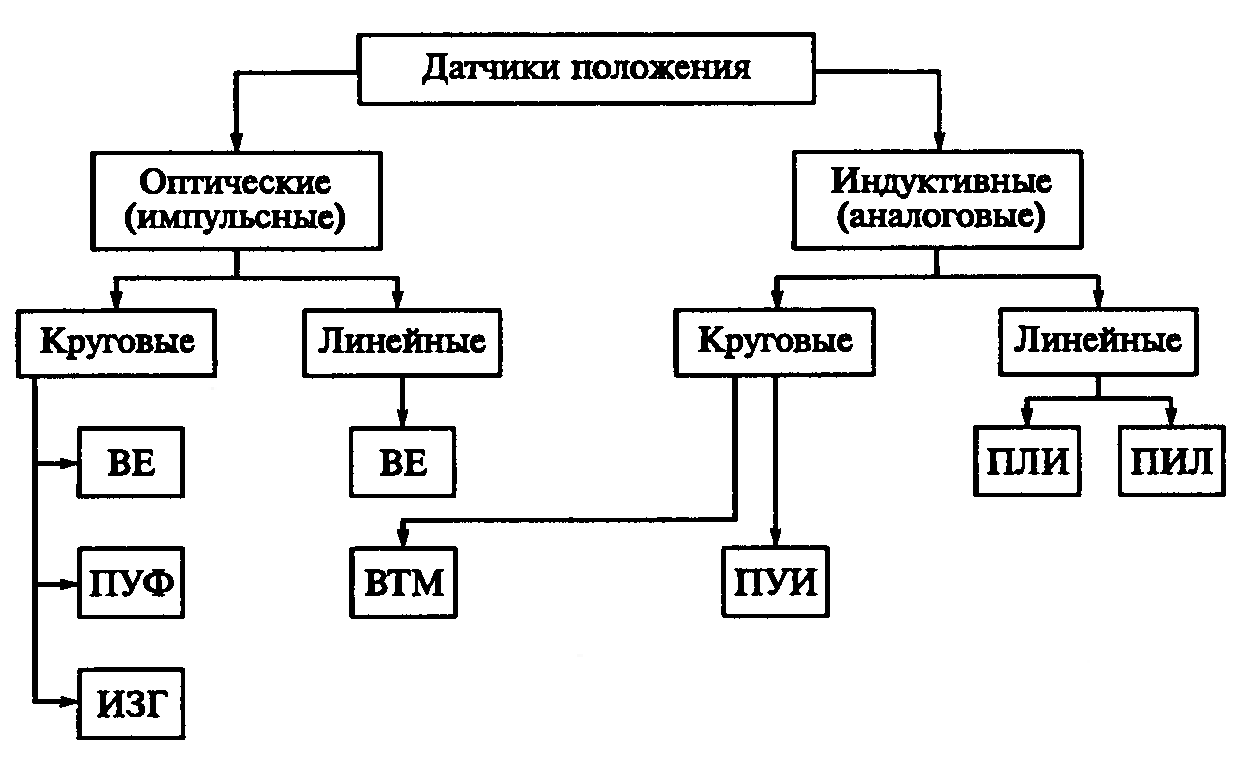
В современных механизмах подач вал двигателя через муфту присоединяется к валу винта ШВП (шарико-винтовая пара), а гайка ШВП жестко соединена с исполнительным органом (координатный стол, суппорт). Привод подачи имеет 2 датчика обратной связи- по скорости (тахогенератор, по пути или перемещению(линейный). В перспективных цифровых приводах датчик скорости отсутствует, т.к. скорость измеряется как отношение пути ко времени. Вспомогательная движение - движение механизмов и узлов, не участвующих в процессе резанья и формообразования детали, но обеспечивающее дополнительные функции работы оборудования (перемещение инструментального магазина в режиме автоматического смены инструмента, работы манипулятора по автоматической загрузки выгрузки заготовок, деталей и тд) Датчики положения В замкнутой системе ЧПУ необходимо контролировать перемещение, при этом на станке контролируется как линейные, так и круговые перемещения. В системах управления датчики управления осуществляют активный контроль за перемещением и позиционированием рабочих органов станков. Классификация датчиков
Рис.3.2. Классификация датчиков
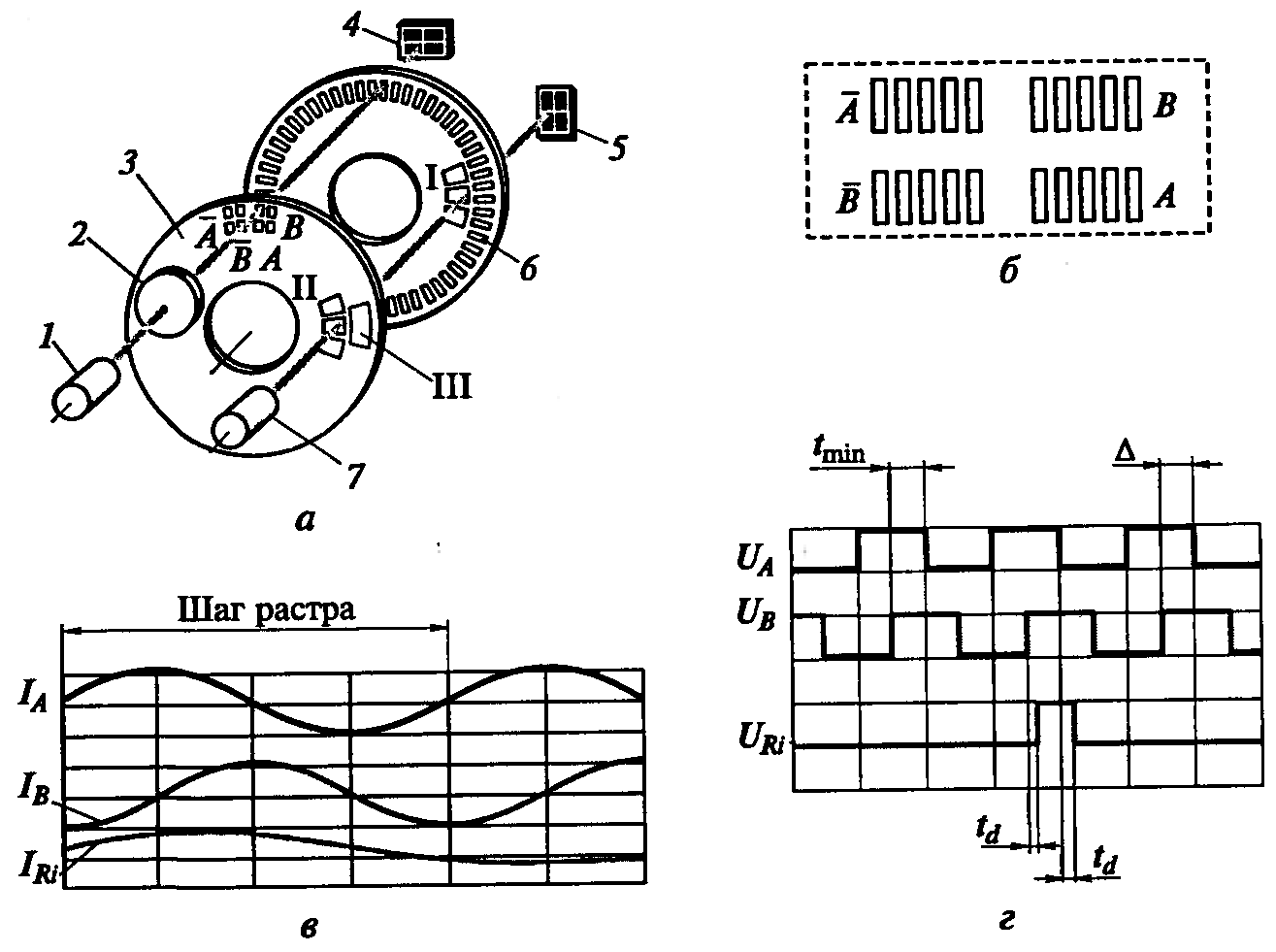
Круговые датчики Используют для косвенного измерения линейных перемещений, при установке на валу в одном из звеньев кинематической цепи. Измерительные преобразователи перемещений формируют стандартные электрические сигналы, дающие информацию о величине и направлении перемещения механизмов. В состав преобразователя входят: датчик положения(ДП), интерполятор и усилитель. Оптические датчики по сравнению с аналоговыми обеспечивают более высокую точность, комплект датчика состоит из механической, оптической и электронной систем. Механическая обеспечивает точное перемещение шкалы с рисками относительно съемника. Принцип работы кругового датчика основан на фотоэлектрическом считывании растровых и кодовых сопряжений. В конструкцию входит: растровое измерительное звено, состоящее из подвижного измерительного раста(6) и неподвижного растрового индикатора(3)
Рис.3.3. Круговой оптический датчик
В состав растрового анализатора входят 4 поля считывания (A, B, \A, \B) каждая из которых имеет сдвиг 90 электрических градусов. \- с инверсией При полном совпадении аналогичных кодовых растров один римская и 2 римская, световой поток, воспринимаемый одной из секций фотоприемника (5) в 3-4 раза больше чем при любом взаимном расположении этих растров. Электронная схема усиливает эти сигналы и преобразует их в прямоугольные. Увеличение числа импульсов в 4 раза достигается электронной схемой (г), помимо этого в оптический датчик может встраиваться блок интерполяции сигналов, выполняющий деление на 5 или 10. Аналогичную конструкцию имеют линейные датчики перемещений. Электроавтоматика станка Коммутационные электрические аппараты станка предназначены для замыкания – размыкания электрической цепи и проведение тока. К ним относят: электромагнитные контакторы, пускатели, реле управления, автоматические выключатели, выключатели, кнопки переключения и управления, предохранители. Электромагнитные контакторы используются в системах управлениях электроприводов (ЭП), для включения – выключения приемников электроэнергии. Контакторы различаются между собой по роду тока главной цепи постоянного/переменного, по роду тока цепи управления, по числу главных полюсов (от 1 до 5), номинальному току главной цепи (4, 6.5, 10, 16, 25, 40, 63, 100, 160, 250, 400…2500). По номинальному напряжению главной цепи (если постоянная 220, 440, 600, переменное: 380, 500, 660). По номинальному напряжению цепи управления (если пост: 24, 48, 60, 110, 220 В, если переменное: 24, 36, 110, 127, 220, 230, 240, 380, 400, 415, 500, 660 с частотой 50Гц). По наличию и исполнению вспомогательных контактов, степени защиты. Электромагнитные пускатели предназначены для дистанционного пуска, непосредственным подключением к сети и остановки 3х фазных асинхронных двигателей с короткозамкнутым роттером. При наличии тепловых реле пускатели осуществляют защиту ЭД от перегрузок. По наличию встроенных кнопок управления, напряжению главной цепи, размеру пускателя и другим признакам. Реле управления используется в схемах управления ЭП для выполнения функций управления и защиты. Различаются между собой: по роду входного воздействия- измерительные (реле тока, напряжения) и логические (реле времени); · по роду тока включающей катушки · по номинальному току цепи управления (1.6, 2.5, 4, 6, 10, 16, 25, 40, 63, 100, 160, 250, 320, 400, 630, 1250А) · по напряжению цепи управления (постоянного: 12, 48, 60, 110, 220; переменного: 12, 24, 36, 110, 220, 380, 660) · по виду возврата (одностабильные, двустабильные) · по числу контактов · по роду контактов
Электромагнитные зубчатые муфты передают вращение при помощи пар зубчатых колес, сцепляемых и разъединяемых при помощи магнитного поля, генерируемого катушкой. Так же существует исполнение, при котором вращение передается без электрического тока, а при подаче напряжение магнитное поле разъединяет зубчатые венцы и момент не передается. Такие муфты используются в автоматической коробке скоростей привода главного движения станков(СПГДС).
Рис.3.4. Электромагнитная муфта Для управления работой гидравлического или пневматического привода используют гидро или пневмоусители с электромагнитным управлением.
Рис.3.5. Гидрораспределитель с электромагнитами А и В
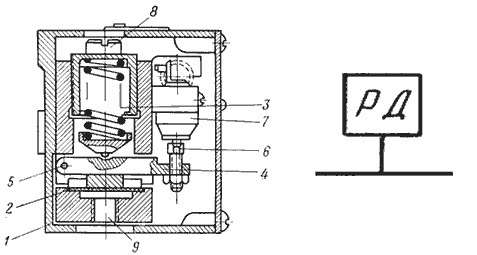
Для контроля давления применяют реле давления
Рис.3.6. Гидравлическое реле давления Наличие инструмента или заготовки определяют с помощью концевых датчиков или бесконтактных индуктивных с дискретным выходом.
Рис.3.7. Бесконтактный индуктивный щелевой датчик
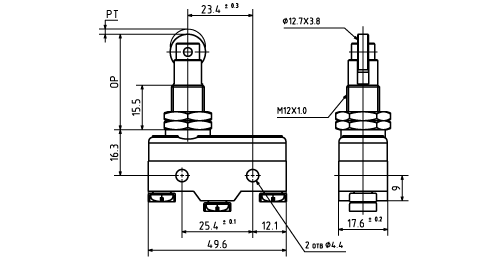
Рис.3.8. Концевой переключатель
Лекция 4 |
Последнее изменение этой страницы: 2017-04-13; Просмотров: 1335; Нарушение авторского права страницы