
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
По разработке и реализации мероприятий по организации дорожного движенияСтр 1 из 17Следующая ⇒
МЕТОДИЧЕСКИЕ РЕКОМЕНДАЦИИ По разработке и реализации мероприятий по организации дорожного движения Организация дорожного движения На регулируемых пересечениях
Москва 2017 Организация дорожного движения На регулируемых пересечениях. Методическое руководство
1. Настоящее Методическое руководство по организации дорожного движения на регулируемых пересечениях (далее – Методическое руководство) предназначено для использования органами государственной власти субъектов Российской Федерации, осуществляющими полномочия и функции в сфере организации дорожного движения на территории субъекта Российской Федерации. 2. В настоящем Методическом руководстве используются термины и определения в значениях, установленных законодательством Российской Федерации, документами технического регулирования и рекомендательными документами Министерства транспорта Российской Федерации. Термины и определения приведены в Приложении 1 к настоящему Методическому руководству. 3. Целью применения Методического руководства является снижение числа конфликтных ситуаций в дорожном движении, предотвращение ДТП и снижение тяжести их последствий за счет организации дорожного движения на регулируемых пересечениях. Организация дорожного движения на регулируемых пересечениях реализуется инженерными средствами, дополняемыми различными методами управления направлением движения транспортных средств (далее – ТС). При создании регулируемых пересечений реализуются схемы, приведенные в настоящем Методическом руководстве. Транспортное обеспечение указанных участков следует реализовать с помощью знаков приоритета движения и светофорного регулирования. Организация дорожного движения на регулируемых пересечениях должна обеспечивать приоритет движения пешеходов и велосипедистов и стимулировать снижение скорости движения транспортных средств. Участки на регулируемых пересечениях усиливают дифференциацию элементов УДС по выполняемым функциям, режимам и скорости движения. 6. Рекомендуемые методы организации дорожного движения на регулируемых пересечениях приводятся в приложениях 2-11 к настоящему Методическому руководству. 7. При внесении изменений в действующие нормативные правовые документы и документы технического регулирования по вопросам организации дорожного движения на регулируемых пересечениях следует руководствоваться актуальными версиями этих документов.
Приложение 1 ОСНОВНЫЕ ПОНЯТИЯ. УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
Основные понятия Светофорный объект – группа светофоров, установленных на участке улично-дорожной сети, очередность движения по которому конфликтующих транспортных потоков или транспортных и пешеходных потоков регулируется светофорной сигнализацией. Проектирование светофорных объектов включает определение количества и последовательности фаз регулирования, составление базисных схем движения транспортных средств и пешеходов в каждой из фаз (рисунок 1.1), расчет длительности тактов и фаз, образующих цикл регулирования.
Сигнальной группой называют комбинацию одновременно включаемых и выключаемых сигналов светофоров. Тактом называется период, в течение которого действует определенная комбинация светофорных сигналов на светофорном объекте. Такты разделяют на основные и промежуточные (рисунки 1.2 и 1.3).
Основной такт разрешает движение определенной группы транспортных средств и пешеходов. Его длительность рассчитывается в зависимости от интенсивности движения транспортных средств в соответствующих направлениях. Если в период основного такта осуществляется движение пешеходов, то его длительность должна быть достаточной для безопасного пересечения проезжей части пешеходами. Промежуточный такт служит для подготовки передачи права движения другой группе участников движения (применяется после основного такта на направлениях, где осуществлялось движение). Его длительность рассчитывается в соответствии со временем, необходимым для освобождения светофорного объекта от потоков, двигавшихся в предыдущем основном такте. Под переходным интервалом понимается интервал времени, в течение которого происходит смена разрешающего сигнала для двух смежных фаз регулирования, т.е. интервал с момента выключения зеленого сигнала одной фазы до момента включения зеленого сигнала следующей фазы регулирования. Переходный интервал предназначен для освобождения перекрестка от транспортных средств и может состоять из нескольких промежуточных тактов (рисунок 1.2). Согласно действующим в настоящее время техническим нормам длительность желтого сигнала в составе переходного интервала принимается 3 с, при этом перед включением желтого сигнала рекомендуется устраивать мигание зеленого сигнала в течение 3 с (светофоры Т.1, Т.3 Т.2, Т.8 и Т.9). Для пешеходных светофоров П.1 и П.2 устройство мигания зеленого сигнала обязательно. Длительность сочетания сигналов «красный с желтым» перед включением зеленого сигнала рекомендуется устраивать не более 2 с. Фаза состоит из основного и промежуточных тактов (рисунок 1.3).
Расщепленной называется фаза, в которой сдвинуты моменты включения или выключения зеленых сигналов транспортных светофоров (рисунок 1.4). При применении режима регулирования с расщепленными фазами вспомогательный такт внутри этих фаз выполняет только информативную функцию. Длительность этого информативного вспомогательного такта не является расчетной величиной и принимается равной 3 с. Циклом регулирования называют периодически повторяющуюся последовательность всех фаз, а режимом регулирования – количество, порядок чередования и продолжительность отдельных фаз и тактов, длительность всего цикла (рисунки 1.1, 1.3, 1.4). Если один или несколько светофоров на светофорном объекте работают в режиме постоянно включенного сигнала, то такой режим носит название режима с совмещенными фазами. В таких случаях моменты смены фаз определяются без учета постоянно включенных сигналов светофоров. Кроме перечисленных выше основных терминов при проектировании ОДД на регулируемых перекрёстках используются также указанные ниже термины: Пешеходный переход - обозначенные дорожными знаками и/или разметкой инженерное сооружение или участок проезжей части для движения пешеходов через автомобильную дорогу. Полоса движения – любая из продольных полос проезжей части, обозначенная или не обозначенная разметкой и имеющая ширину, достаточную для движения автомобилей в один ряд. На подходах к перекрестку различают полосы движения: выделенные (эксклюзивные) по которым выполняется движение только в одном направлении (или только прямо, или только левоповоротное или правоповоротное движение); с распределением потоков (по полосе осуществляется движение в нескольких направлениях).
Преимущество (приоритет) – право на первоочередное движение в намеченном направлении по отношению к другим участникам движения. Регулирование движения на перекрестке может быть: жесткое (постоянное по времени независимо от его интенсивности движения); жесткое с применением библиотеки режимов регулирования (тот или ной режим в составе библиотеки используется в определенные часы суток); адаптивное (режимы зависят от интенсивности движения, используются транспортные детекторы). Общая последовательность проектирования регулируемого перекрестка независимо от типа регулирования представлена на рисунке1.5.
Функциональная территория перекрестка – зона, в пределах которой ограничивается доступ к проезжей части (т.е. въезд на проезжую часть и выезд с нее),а также запрещается паркование на проезжей части (рисунок 1.6). Соблюдение функциональной территории перекрестка обеспечивает сохранение его пропускной способности.
Приложение 2
ИСХОДНЫЕ ДАННЫЕ Приложение 3
ПЛАНИРОВКА РЕГУЛИРУЕМЫХ ПЕРЕКРЕСТКОВ
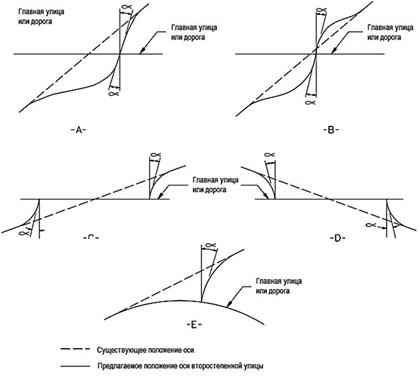
1. Общие требования к планировке перекрестк ов 1.1. Технические решения регулирования движения поворотных транспортных потоков на перекрестках повышающих уровень безопасности и качества дорожного движения возможны за счет планировочных решений перекрестков, что практически не используется в Российской Федерации. На условия движения транспортных потоков на перекрестке и уровень безопасности оказывает значительное влияние угол пересечения, которым является меньший угол, образованный осями пересекающихся улиц или дорог. 1.2. Основные элементы планировки регулируемых пересечений представлены на рисунке 3.1.
1.3. Рекомендуемым углом пересечения является угол близкий к значению 90º. Желательно избегать пересечения с углом менее 75º (рисунок 3.2), так как это приводит к увеличению протяжённости перекрёстка и углу поворота более 90º для увеличения угла поворота 4-х направлений движения. При остром угле пересечения осей улиц (т.е. меньше 70˚) увеличивается протяженность пешеходных переходов, так как пешеходные переходы размещаются под углом к оси проезжей части.
1.3. С целью обеспечения оптимального угла пересечения рекомендуется менять положение оси второстепенной улицы (рисунки 3.3, 3.4).
1.4. Пропускная способность перекрестка должна соответствовать пропускной способности подходов, поскольку, в отличие от перегонов улиц и дорог, количество полос движения на перекрестке является основным фактором, определяющим пропускную способность и задержки транспортных средств. Поэтому на подходах к перекрестку следует увеличивать количество полос движения для обеспечения необходимой пропускной способности (рисунок 3.4.).
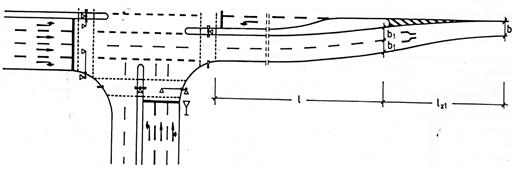
1.5. Количество полос движения на каждом из подходов к перекрестку следует определять из условия, что интенсивность движения на любой из полос не будет превышать 450 авт./ч. 1.6. Количество полос для прямого движения в границах перекрестка не должно быть меньше количества полос на прямых участках улицы на подходе к перекрестку. В случаях, когда на выходе с перекрёстка нет достаточного количества полос возможно устройство дополнительной полосы на участке разгрузки перекрестка (рисунок 3.5).
Длину участка разгрузки следует принимать не менее 100 м, а отгонку сужения выполнять с уклоном 1:8 -1:15 с применением кривых радиусом не менее 40 м. Планировочные решения правоповоротных полос 4.1. При выделении полосы для правых поворотов в случаях разрешаемой скорости движения на улице 50 км/ч и более устраиваются островки безопасности (рисунок 3.10).
4.2. В условиях нового строительства и реконструкции при наличии территории для расширения проезжей части необходимая длина выделенной для поворотов полосы (как правых, так и левых) определяется в соответствии с рисунком 3.11. Длина участка накопления рассчитывается как длина очереди 95% обеспеченности.
4.3. Протяженность отгонки полосы, выделенной для поворотов, принимается не менее 30 м с применением кривых в плане радиусом не менее 40 м (рисунок 3.12). Отгонку выделяемых для поворотов полос следует выполнять с уклоном 1:8 – 1: 15.
4.4. В случаях реконструкции в стесненных условиях отгонку можно выполнять с уклоном 1:4 -1:5. Планировочные решения левоповоротных полос 4.5.1. Устройство выделенных полос для левых поворотов может осуществляться на основе разных планировочных решений похода к перекрестку (рисунки 3.13 – 3.16). Для
4.5.2. В случаях, когда проезжая часть не имеет разделительной полосы - устройство выделенной полосы для левых поворотов можно формировать островком. Формирование групп полос Понятие «группа полос» 9.1.1. При проектировании регулируемого перекрестка необходимо определить количество групп полос на каждом из подходов к перекрестку и количество полос в составе каждой группы. Группа полос может обслуживать от одного до нескольких направлений движения на регулируемом объекте. На рисунке 3.29 приведены примеры группы полос на подходах к регулируемому перекрестку.
9.1.2. Полосы движения на подходах к регулируемым перекресткам делятся на два типа: выделенные (или эксклюзивные) полосы, на которых разрешается движение только в одном направлении (например, движение только прямо или только левые повороты); полосы с распределением потоков, на которых разрешается движение в разных направлениях (например, движение прямо и направо). 9.1.3. При формировании групп полос следует руководствоваться следующими положениями: выделенная лево (право)поворотная полоса или полосы рассматривается как отдельная группа полос; если на подходе к перекрестку имеется выделенная лево (право) поворотная полоса (или обе), все остальные полосы, как правило, объединяются в одну группу полос. Если две или более полос движения объединяются в группу, то в последующих расчетах эти полосы рассматриваются как единое целое. Параметры групп полос 9.2.1 Параметры, являющиеся исходными для расчета значений потока насыщения и пропускной способности полос представлены в таблице 3.4.
Таблица 3.4. Параметры групп полос
Примечание: * в настоящее время имеются методики расчета задержек для случаев образования очереди транспортных средств (убывающая или возрастающая очередь), при этом учитывается длительность периода, для которого выполняются расчеты.
9.2.2. Параметры групп полос используются для расчета потоков насыщения.
Приложение 4
Т.1. п | Т.1. л |
Т.1. пл | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Т.2 | Применяют для регулирования движения в определенных направлениях в случаях, когда движущийся по их разрешающему сигналу транспортный поток не имеет пересечений (слияний) в пределах перекрестка с транспортными потоками других направлений движения, а также пересечений с пешеходными потоками (бесконфликтное регулирование). В этом случае каждому направлению движения транспортных средств должен соответствовать свой светофор | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

|
| 
| Светофоры Т.3 любых исполнений допускается применять в качестве повторителей сигналов светофоров Т.1 таких же исполнений, если их видимость для водителя транспортного средства, остановившегося у стоп-линии на крайней полосе проезжей части данного направления, затруднена. Светофоры Т.3 любых исполнений устанавливают на одной стойке со светофорами Т.1 таких же исполнений | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Т.3 |
Т.3.п | Т.3.л | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Т.9 | Применяют для регулирования движения велосипедистов в местах пересечения велосипедной дорожки с проезжей частью дороги или регулируемым пешеходным переходом | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
1.6. Длительность сигнала «красный с желтым» должна быть не более 2 с, длительность желтого сигнала во всех случаях должна быть 3 с.
1.7. Если расчетная длительность промежуточного такта превышает указанные значения, то длительность красного сигнала увеличивают на время превышения. Это требование не распространяется на случаи, когда на светофорном объекте используются контроллеры, не способные делить промежуточный такт.
1.8. Допускается последовательность включения сигналов «красный - зеленый - желтый – красный», если светофорный объект не включен в систему координированного управления движением.
Приложение 5
РАСЧЕТ ПОТОКА НАСЫЩЕНИЯ
Расчет потока насыщения
2.1. Расчетное значение потока насыщения S группы полос в конкретных дорожных условиях определяется по (5.3):
 , (5.3)
, (5.3)
где
SO – идеальный поток насыщения, прив.авт./ч (по умолчанию 1900);
N -количество полос движения в составе группы;
fW - коэффициент, учитывающий ширину полосы движения;
fHV - коэффициент, учитывающий долю грузовых автомобилей в потоке;
f g - коэффициент, учитывающий продольные уклоны;
fP - коэффициент, учитывающий помехи, создаваемые парующимися транспортными средствами;
f bb - коэффициент, учитывающий помехи, создаваемые автобусами;
f a - коэффициент, учитывающий тип территории;
fL U – коэффициент, учитывающий неравномерность загрузки полос движения;
fL T - коэффициент, учитывающий помехи, создаваемые поворачивающими налево транспортными средствами в составе группы;
fRT - коэффициент, учитывающий помехи, создаваемые поворачивающими направо транспортными средствами в составе группы;
fL pb - коэффициент, учитывающий помехи, создаваемые пешеходами при повороте налево;
f Rpb - коэффициент, учитывающий помехи, создаваемые пешеходами при повороте направо.
2.2. Идеальный поток насыщения SO определяется экспериментально для потоков, состоящих только из легковых автомобилей, в следующих условиях:
ширина полосы движения 3,6 м;
уклон на подходе к перекрестку равен 0%;
сухое дорожное покрытие;
отсутствие помех, создаваемых паркующимися автомобилями и остановками общественного транспорта;
отсутствие конфликтующих пешеходных, велосипедных и транспортных потоков;
отсутствие в потоке грузовых автомобилей и автобусов.
2.3. В таблице 5.2 приведены формулы расчета коэффициентов, входящих в состав уравнения 5.3, позволяющие скорректировать значение идеального потока насыщения, учитывая реальные условия движения.
Таблица 5.2
Коэффициенты расчета потока насыщения в конкретных дорожных условиях
| Коэффициент учитывающий: | Формула | Переменные, используемые в расчете | Примечания |
| Ширину полос | 
| W - ширина полосы, м | W ≥ 2,4 м если W> 4,8 м, полосу можно рассматривать как две полосы |
| Продольный уклон | 
| G - величина продольного уклона на подходе к перекрестку, % | -6 ≤ %G ≤ +10 Минус означает движение “вниз” |
| Паркирование | 
| N – число полос в группе Nm – число маневров, связанных с паркированием (парк/ч) | 0 ≤ Nm ≤ 180 fp ≥ 0,05 fp = 1,0 в случае отсутствия паркирования |
| Остановки автобусов | 
| N – число полос в группе движения NB – число автобусных остановок (автоб/ч) | 0 ≤ NB ≤ 250 fbb ≥ 0,05 |
| Тип территории | в центральном районеf а= 0,9 в других районах f а= 1,0 | ── | ── |
| Использование полос | 
| vg – интенсивность движения в группе полос vg 1– интенсивность движения на максимально загруженной полосе в группе N – число полос в группе | ── |
| Повороты налево | Бесконфликтное движение:
выделенная
полоса
fLT= 0,95
полоса с распределением потоков

| PLT - доля транспортных средств, поворачивающих налево в группе полос | В случае конфликтного или при сочетании конфликтного и бесконфликтного движения применяется специальная процедура (см. раздел …) |
| Повороты направо | Выделенная полоса: fRT= 0,85 полоса с распределением потоков fRT= 1,0-(0,15)PRT Однополосный подход: fRT= 1,0-(0,135)PRT | PRT - доля транспортных средств, поворачивающих направо в группе полос | fRT ≥ 0,05 |
| Влияние пешеходов на левоповоротные и правоповоротные потоки. | Для движения налево: fLpb Для движения направо: fRpb | PLT - доля транспортных средств, поворачивающих налево в группе движения Vo – приведенная интенсивность движения в противоположном приоритетном потоке PRT- доля транспортных средств, поворачивающих направо в группе движения | Специальная процедура |
| Влияние пешеходов на левоповоротные и правоповоротные потоки. | Для движения налево: fLpb Для движения направо: fRpb | PLT - доля транспортных средств, поворачивающих налево в группе движения Vo – приведенная интенсивность движения в противоположном приоритетном потоке PRT- доля транспортных средств, поворачивающих направо в группе движения | Специальная процедура |
2.4. Коэффициент, учитывающий ширину полосы движения fW. Значение ширины полосы движения может варьировать в пределах от 2,4 до 4,8 м. Полосу движения шириной более 4,8 м следует рассматривать как две узкие полосы движения.
2.5. Коэффициенты, учитывающие величину уклона fG. Значение величины продольного уклона на подходе G может меняться к перекрестку в пределах от -6% до +10% («минус» – означает, что поток на подходе движется вниз, «плюс» – поток движется вверх).
2.6. Коэффициент, учитывающий наличие уличных стоянок fP. Автомобили, маневрирующие с целью постановки на уличную стоянку, создают помехи потоку, движущемуся по группе полос, вдоль которой разрешены уличные стоянки. Предполагается, что каждый такой маневр блокирует движение по соответствующей полосе движения, в среднем, на 18 с. Учитываются только те уличные стоянки, которые находятся на расстоянии не более 75 метров перед, или после рассматриваемого перекрестка. При наличии более 180 маневров за час принимается предельное значение – 180 маневров/ч. При отсутствии уличной стоянки значение коэффициента fP принимается равным 1,0.
2.7. Коэффициент, учитывающий наличие автобусных остановок fbb. Коэффициент учитывает помехи, создаваемые потоку, движущемуся по группе полос, вдоль которой размещен остановочный пункт. Учитываются только те остановки, которые находятся на расстоянии не более 75 метров перед или после рассматриваемого перекрестка. В случае, если на остановочном пункте останавливается более 250 автобусов в час, необходимо принимать предельное значение, равное 250 авт./ч. В среднем величина помехи от одного остановившегося автобуса принимается равной 14,4 с в течение зеленого сигнала.
2.8. Коэффициент, учитывающий тип территории fA. Коэффициент учитывает относительное снижение потока насыщения в центральных районах города, по сравнению с остальными районами. Здесь учитывается совокупность узких улиц, частого паркирования, деятельности такси и автобусов, малых радиусов поворотов, ограниченных возможностей использования выделенных левоповоротных полос движения, большого количества пешеходов. Значение данного коэффициента выбирается в зависимости от наличия перечисленных выше факторов.
2.9. Коэффициент, учитывающий неравномерность загрузки полос движения fLU.Коэффициент учитывает неравномерное распределение транспортного потока по полосам в группе полос, включающей более одной полосы. Равномерность распределения транспортного потока по полосам в группе полос определяется в результате натурного обследования. При отсутствии возможности обследования для группы с количеством полос движения более одной значение коэффициента fLU принимается равным 0,95 (5.4).
 , (5.4)
, (5.4)
где
vg – интенсивность движения по группе полос, прив.ед./ч;
vg1 – интенсивность движения по наиболее загруженной полосе в группе, прив.ед./ч;
N - количество полос движения в группе.
2.10. Коэффициент, учитывающий правоповоротное движение fRT. Коэффициент fRT учитывает, прежде всего, геометрические особенности рассматриваемого регулируемого пересечения. Возможны три случая:
правоповоротное движение осуществляется по выделенной полосе;
правоповоротное движение осуществляется по распределяющей полосе;
правоповоротное движение осуществляется с подхода к перекрестку, имеющего лишь одну полосу движения (т.е. левые, правые повороты и прямое движение осуществляются с одной полосы).
При разрешении правоповоротных поворотов на красный сигнал, интенсивность автомобилей, совершающих поворот, должна быть вычтена из расчетной величины интенсивности правоповоротного движения.
2.11. Коэффициент, учитывающий левоповоротное движение fLT. При определении коэффициента fLT различают два случая:
- движение налево осуществляется в конфликте с противоположным приоритетным транспортным потоком;
- левоповоротный поток движется без конфликта.
В случае отсутствия конфликта левоповоротный поток рассматривается аналогично правоповоротному потоку. В случае движения с конфликтом или при сочетании бесконфликтного движения и движения с конфликтом (например, при ранней «отсечке») используется специальная процедура расчета коэффициента fLT.
2.12. Коэффициенты, учитывающие помехи, создаваемые пешеходами лево- и правоповоротным транспортным потокам fLpb и fRpb. Для определения этих коэффициентов применяются специальные расчетные процедуры. При этом для левоповоротных потоков учитывается не только конфликт с пешеходным потоком, но и одновременный конфликт с транспортным потоком.
Приложение 6
РАСЧЕТ РЕЖИМА РЕГУЛИРОВАНИЯ
1. Минимальная возможная длительность цикла регулирования при рассматриваемых значениях фазовых коэффициентов (6.1):
 , (6.1)
, (6.1)
где
 – продолжительность потерянного в цикле времени; с;
– продолжительность потерянного в цикле времени; с;
 – сумма фазовых коэффициентов;
– сумма фазовых коэффициентов;
n– число фаз в цикле.
2. Оптимальная длительность цикла регулирования определяется по формуле Вебстера (6.2):
 (6.2)
(6.2)
3. Суммарная эффективная длительность зеленых сигналов в цикле  (6.3):
(6.3):
 , (6.3)
, (6.3)
где
C – выбранная расчетная продолжительность цикла, с;
 – длительность переходного интервала в фазе i.
– длительность переходного интервала в фазе i.
4. Длительность зеленого сигнала фазы i (6.4)
 . (6.4)
. (6.4)
5. Продолжительность каждой из фаз, в которой присутствует движение пешеходов, должна обеспечивать их безопасно. Продолжительность времени необходимого для перехода проезжей части рассчитывается по (6.5, 6.6):
|
| для WE > 3,0 (м); | (6.5) |
| для WE ≤ 3,0 (м), | (6.6) |
где
Gp – минимальная длительность зеленого времени, необходимая для пересечения пешеходами рассматриваемой группы полос движения, с;
L – длина пешеходного перехода, м;
Sp – средняя скорость передвижения пешехода, м/с;
WE – эффективная ширина пешеходного перехода, м;
3,2 – время, требуемое пешеходам на реакцию на смену сигналов и начало движения, с;
Nped – количество пешеходов, пересекших рассматриваемый переход в течение одного цикла регулирования.
6. Среднее значение скорости движения пешеходов Sp через переход принимается равным 1,2 м/с (т.е. скорость 15% обеспеченности). Значение Sp может варьироваться в зависимости от типа района, геометрических особенностей пешеходного перехода, среднестатистического возраста населения в данном районе.
7. Параметр Nped определяется по (6.7):
 , (6.7)
, (6.7)
где
vped – интенсивность пешеходов в час, пеш/ч;
С – длительность цикла регулирования, с.
8. Пропускная способность полосы движения при условии движения без конфликтов на регулируемом пересечении определяется согласно (6.8):
 , (6.8)
, (6.8)
где
cji – пропускная способность полосы j в течение фазы регулирования i , прив.ед./ч;
Sij – поток насыщения полосы j в течение фазы регулирования i, прив.ед./ч;
gj – эффективная длительность фазы регулирования i, c;
C– длительность цикла регулирования, c.
Приложение 7
Приложение 8
Приложение 9
Приложение 10.
Приложение 11
Приложение 12
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
1. ГОСТ Р 51256-2011. Разметка дорожная. Классификация. Технические требования.
2. ГОСТ Р 52289-2004. Технические средства организации дорожного движения.
3. ОДМ 218.2.020-2013 Методические рекомендации по оценке пропускной способности автомобильных дорог. – М.,2012.
4. ОДМ 218.6.003-2011 Методические рекомендации по проектированию светофорных объектов на автомобильных дорогах . – М.,2013
5. Рекомендации по обеспечению безопасности движения на автомобильных дорогах //М.:РОСАВТОДОР, 2002 г. -218 с.
6. Руководство по регулированию дорожного движения в городах. – М.: Стройиздат, 1974. – 97 с.
7. Афанасьев М.Б. и др. Условия введения различных режимов регулирования дорожного движения. – М.: Изд-во ВНИИ БД МВД СССР, 1976. – 319 с.
8. Кременец, Ю.А. Технические средства организации дорожного движения.– М.: ИКЦ «Академия», 2005. -279 с.
9. Левашев А.Г. Михайлов А.Ю. Сравнение временных интервалов на регулируемом перекрестке. Источник: http://www.istu.edu/docs/ education /faculty/ air_mechanical_transport /menagment_at/ публикации/ levaschov.pdf.
10. Левашев А.Г. Повышение эффективности организации дорожного движения на регулируемых пересечениях Автор. дис. ... канд. техн. наук. Иркутск,2004. – 20 с.
11. Левашев А.Г., Михайлов А. Ю. Идеальный поток насыщения на регулируемых пересечениях Источник: http://www.transport.istu.edu /downloads/satur_flow.pdf.
12. Лобанов Е.М. Транспортная планировка городов. – М.: Транс порт, 1990. – 248 с.
13. Михайлов А.Ю. Разработка критерия оценки качества организации движения на регулируемых пересечениях улично-дорожных сетей городов.: Автореф. … канд. техн. наук. – М.,1986. – 18 с.
14. Михайлов А.Ю. Разработка критерия оценки качества организации движения на регулируемых пересечениях улично-дорожных сетей городов.: Автореф. … канд. техн. наук. – М.,1986. – 18 с.
15. Проектирование регулируемых пересечений: учеб. пособие / А. Г. Левашев А.Г., Михайлов А. Ю., Головных И. М.;. - Иркутск : Изд-во Иркутского государственного технического университета, 2007. - 208 с. Источник: http://www.transport.istu.edu/downloads/ books/b2 /signalized%20intersections.pdf.
16. Branston D., Van Zulien H.J. The estimation of saturation flow, effective green time and passenger car equivalents at traffic signals by multiple liner regression. Transp. Res., 1987, v 12, p. 47 – 53.
17. Briggs T. Time headways on crossing the stop-line after queuing at traffic lights. // Traffic Eng. and Contr., 1977, v18, N5,p. 264 – 265.
18. Canadian Capacity Guide for Signalized Intersections. Third Edition // Canadian Institute of Transportation Engineers 2008. – 232 p.
19. Capacity Analysis of Pedestrian and Bicycle Facilities. Источник http: //www.fhwa.dot.gov /publications/research/safety/pedbike/98107/intro.cfm.
20. Capacity and Level of Service of Finnish Signalized Intersections//Finnra Reports 25/2002. - 164 p.
21. Capacity and LOS Analysis of a Signalized I/S Источник: http:// www.nptel.ac.in / courses/ 105101008/downloads/cete_37.pdf.
22. Highway Capacity Manual. // TRB, Washington, DC, 2000. – 1134 p.
23. http://www.accessmanagement.info/Document/design-right-turn-lanes.
24. http://www.transport.istu.edu/downloads/books/b2/signalized%20intersections.pdf.
25. Signalized Intersections. Источник: http://courses.washington.edu/cee320ag /Lecture /Signalized%20Intersections_student%20notes_part2.pdf.
26. Signalized Intersections: Informational Guide Second Edition// US Department of Transport, Federal Highway Administration, Publication No. FHWA-SA-13-027, 2013. - 323 p.
27. Signalized Intersections: Informational Guide// US Department of Transport, Federal Highway Administration, Publication No. FHWA-HRT-04-091, 2004. - 369 p.
28. Sosin J.A., Delays at intersections controlled by fixed cycle traffic signals. // Traffic Eng. and Contr., 1980, v21, N5,p. 264 – 265.
29. Traffic Analysis at Signalized Intersections 3.Источник: http://nexus.umn.edu /Courses/ce3201/CE3201-L2-07.pdf.
МЕТОДИЧЕСКИЕ РЕКОМЕНДАЦИИ
по разработке и реализации мероприятий по организации дорожного движения
Последнее изменение этой страницы: 2019-05-08; Просмотров: 621; Нарушение авторского права страницы



















 , м
· Наличие паркирования
, м
· Наличие паркирования



