
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Для курсантов специальности 26.05.05 «судовождение»Стр 1 из 27Следующая ⇒
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ «КЕРЧЕНСКИЙ ГОСУДАРСТВЕННЫЙ МОРСКОЙ ТЕХНОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ»
Кафедра «Судовождение и промышленное рыболовство»
Пазынич Г.И.
ПРОМЫСЛОВАЯ НАВИГАЦИЯ
КОНСПЕКТ ЛЕКЦИЙ
Для курсантов специальности 26.05.05 «судовождение» ОЧНОЙ и заочной форм обучения
Керчь, 2016 г.
СОДЕРЖАНИЕ
Стр. Предисловие 4 РАЗДЕЛ 1. Навигационное обеспечение манаврирования Судов в процессе лова 8 Промысловая навигация 8 1.1.1 Введение 8 1.1.2 Промысловая прокладка 10 Теоретические основы маневрирования при траловом промысле 12 1.2.1 Траектория трала в горизонтальной плоскости после поворота судна 12 1.2.2 Сближение с быстро подвижным локальным косяком пелагических рыб и определение элементов его горизонтального перемещения 23 Выбор и расчет промысловых курсов при траловом лове. 29 1.3.1 Промысловые курсы при разноглубинном траловом лове. Расчет курса траления 29 1.3.2 Выбор промысловых курсов и маневрирование при донном траловом лове 36 Н авигационное обеспечение кошелькового лова 41 1.4.1 Замет кошелькового невода с помощью гидроакустической станции. Траектории замета 41 1.4.2 Выбор начальной позиции замета кошелькового невода и расчет курсов выхода судна в эту позицию 45 Навигационное обеспечение дрифтерного лова 46 1.5.1 Выбор места и направления постановки дрифтерного порядка. Учет перемещения судна при дрейфе с сетями 46 1.5.2 Поиск потерянного дрифтерного порядка 52 РАЗДЕЛ 2. РЕШЕНИЕ ЗАДАЧ ТАКТИКИ ПРОМЫСЛА 56 Основные понятия тактики промысла 56 2.1.1 Особенности решения задач тактики промысла в современных условиях. 56 2.1.2 Научные основы тактики промысла 57 2.1.3 Задачи тактического управления промыслом 58 2.1.4 Исследование операций, как метод решения задач тактики промысла 59 Использование методов линейного программирования. 62 2.2.1 Сущность методов линейного программирования 62 2.2.2 Графическое решение задачи 63 2.2.3 Пример использования графического метода решения 66 2.2.4 Аналитическое решение задачи 71 Выбор управляющих действий в условиях неопределенности. 74 2.3.1 Промысел, как конфликтная ситуация 74 2.3.2 Применение теории игр 74 Применение методов теории статистических решений 78 2.4.1 Сущность теории статистических решений 78 2.4.2 Определение целесообразности местного поиска 79 2.4.3 Расчет целесообразности в другой район промысла 82 Теория массового обслуживания 86 2.5.1 Система массового обслуживания 86 2.5.2 Критерии работы систем массового обслуживания. 87 2.5.3 Выбор оптимальной системы обработки промысловых судов 89 2.5.4 Расчет показателей работы систем массового обслуживания 94 2.6 Основы управления запасами 98 2.6.1 Основные понятия 98 2.6.2 Расчет оптимального промыслового режима (уровня запаса) 99 2.6.3 Применение алгоритма Литтла 102 Понятие о динамическом программировании 106 2.7.1. Основные понятия 106 2.7.2. Общий порядок решения задач методом динамического программирования при конечном числе состояний управляемого объекта 107 2.7.3.Расчет оптимального перехода через океан в район промысла 109 2.7.4. Планирование использования супертраулеров при автономном ведении промысла в отдаленных районах 111 Заключение 116 Список рекомендуемой литературы 118 ПРЕДИСЛОВИЕ
Учебная дисциплина «Промысловая навигация» предназначена для уровня основной образовательной программы – специалитет. Специальность - 26.05.05 «Судовождение». Статус дисциплины – базовая. Включена в учебный план набора начиная с 2015 года Описание учебной дисциплины по формам обучения
Конспект лекций составлен в соответствии с рабочая программой отвечающей требованиям ФГОС ВО, компетенций МК ПДМНВ-78 с поправками и рабочего учебного плана с учетом требований ООП. Требования к результатам освоения дисциплины Процесс изучения дисциплины направлен на формирование следующих компетенций Федерального государственного образовательного стандарта высшего профессионального образования:
3.1. Профессиональные компетенции (ПК) и (ПКС)
После изучения курса студенты должны:
Знать: взаимосвязи движения промыслового судна и его орудия лова, как агрегата; механику взаимодействия орудия лова и судна, влияние работы орудия лова и промысловых механизмов на маневренные характеристики судна в объёме достаточном для грамотной эксплуатации судна на промысле; методику выбора места для эффективного промысла; методику расчета траектории движения трала; методику обоснования замета кошелькового невода. методы и способы решения задач управления транспортным процессом и промыслом с применением различных видов математических моделей; основы для дальнейшего самостоятельного использования этих моделей при управлении работой судов мирового и отечественного морского и промыслового флота. Уметь: выполнять правильную оценку навигационной обстановки и промысловой ситуации для эффективного управления движением промыслового комплекса. Обосновывать необходимое маневрирование рыболовного судна курсом и скоростью на всех этапах лова. Обосновать выбор места безопасного начала или окончания промыслового цикла. Обосновать оценку навигационной и промысловой безопасности на промысле, когда плотность промысловой группы судов выше, чем в стесненных условиях плавания, а сближение судов на ходу до двух кабельтовых - норма, установленная Правилами совместного плавания и промысла (ПСПП-73). Применять на практике известные методы решения задач оптимального управления работой судов отечественного морского и промыслового флота; самостоятельно разработать методы решения промысловых и транспортных задач с применением различных математических методов.
Владеть: основами морской культуры и управления движением судна; методами наблюдения и регистрации данных об условиях плавания и промысла; основными методами работы на ПК для обработки навигационных и промысловых данных; навыками выполнения элементарных расчетов по управлению движением промыслового комплекса; навыками подачи стандартных команд по управлению движением судна с орудием лова и исполнения этих команд; методами математического моделирования задач управления сложными производственными процессами морских перевозок и промысла; способами сбора информации о результатах производственной деятельности промысловых и транспортных судов; приемами применения полученных знаний в процессе выполнения дипломной работы. С целью сокращения объема пособия в нем не приводятся числовые примеры решения задач. Они подробно рассмотрены в задачнике по навигации и лоции и в названных ниже учебниках. РАЗДЕЛ 1. Судов в процессе лова Промысловая навигация В ведение Предмет промысловой навигации. Развитие науки на современном этапе характеризуется, с одной стороны, интеграцией наук (их взаимным проникновением), а с другой - дифференциацией как отраслей знаний, так и каждой отрасли. Дифференциация науки судовождения связана в значительной мере с тем, что методы вождения отдельного судна или группы судов определяются не только навигационной и гидрометеорологической обстановкой в районе плавания, но и задачей плавания, обусловленной в общем случае назначением судна. Так, например, необходимость решения задач тактики морского боя, совершенствование боевых кораблей и их вооружения привели к становлению и развитию как самостоятельной научной дисциплины тактической навигации, на основе которой впоследствии сформировалась дисциплина «маневрирование». Основной прикладной задачей этой научной дисциплины является достижение наивыгоднейшего положения относительно объекта маневра при одновременном сохранении наибольшей безопасности собственного движения маневрирующего корабля. Развитие активного морского рыболовства, гидроакустической техники, необходимость облова небольших по протяженности и подвижных косяков рыбы, освоение промысловых районов, стесненных опасностями для орудий лова поставили такие задачи тактики промысла, которые могли быть решены только на основе использования достоверной гидроакустической информации о положении относительно судна облавливаемого косяка, орудия лова, подводных опасностей и изучения динамики сложной системы судно - орудие лова. Так возникла дисциплина «промысловая навигация». Предметом промысловой навигации как научной дисциплины является разработка способов маневрирования добывающего судна, обеспечивающих наведение орудия лова на облавливаемый косяк рыбы (или обмет косяка). Эти способы базируются на использовании гидроакустической информации о положении относительно судна орудия лова, косяка рыбы и подводных опасностей, а также на изучение динамики системы судно - орудие лова. Навигация и промысловая навигация имеют хотя и во многом схожие, но принципиально различные теоретические основы. Закономерности, на основе которых разрабатываются способы промысловой навигации, устанавливаются по результатам исследований динамики системы судно — орудие лова и существенно отличаются от законов перемещения судна относительно поверхности земли в свободном плавании, лежащих в основе решения задач навигации. Одна из наиболее сложных задач промысловой навигации сводится к разработке способов маневрирования судна, обеспечивающих наведение буксируемого им трала на локальный подвижной косяк. Если косяк рыбы располагается в толще воды, то задача наведения трала на такой косяк является пространственной. Учитывая, что в процессе непосредственного наведения трала на косяк пелагических рыб глубина хода трала изменяется в ограниченных пределах, эту задачу можно разделить на две независимые: наведение трала на косяк в плоскости горизонта (в плане) и наведение трала на косяк в вертикальной плоскости (по глубине). Решение первой задачи требует маневров курсом судна, а второй - скоростью судна. Промысловая навигация полностью решает задачу наведения трала на косяк в плоскости горизонта, требующую маневрирования курсом судна. Задача же наведения трала на косяк в вертикальной плоскости решается не только маневрированием скорости судна, но и изменением длины вытравленных ваеров, а также созданием заглубляющей или подъемной силы с помощью управляемой гидродинамической оснастки трала. Поэтому здесь промысловая навигация объединяется с техникой промышленного рыболовства, отдавая ей пальму первенства. С точки зрения кинематики задача наведения трала на локальный» подвижный косяк в плоскости горизонта (в плане) сводится к определению координат точки встречи цели - центра плоскости косяка - с буксируемым судном тралом. Такая задача, как известно, может быть решена, если заданы траектории и уравнения движения трала и косяка. Расчетные методы наведения трала на косяк рыбы или обмета его кошельковым неводом требуют использования достаточно точной гидроакустической информации. Такая информация может быть получена только с помощью современных рыбопоисковых гидроакустических станций, обладающих высокой разрешающей способностью и обеспечивающих возможность выделения центра плотности - ядра косяка. Быстротечность процессов прицельного облова локальных подвижных косяков разноглубинным тралом и кошельковым неводом не позволяет достаточно успешно осуществлять расчеты маневрирования «вручную». Как показала практика, применение для этой цели специальных таблиц, номограмм, планшетов во многих случаях не дает должного эффекта. Все это заставляет уделять особое внимание аналитическим методам решения задач промысловой навигации, которые могут быть реализованы с помощью вычислительной техники и составляют математическую основу автоматизации процессов маневрирования судов с орудиями лова. В настоящее время разрабатываются и внедряются на добывающих судах автоматизированные информационно-управляющие промыслово-навигационные комплексы обеспечивающие полуавтоматическое решение задач замета кошелькового невода, наведения разноглубинного трала на косяк рыбы в плоскости горизонта и автоматическое решение задачи наведения трала на косяк в вертикальной плоскости (по глубине). Практическое значение промысловой навигации, ее роль в повышении эффективности активных методов лова будет непрерывно возрастать по мере развития и внедрения на добывающих судах средств вычислительной техники и автоматизации, рыбопоисковых гидроакустических станций, обеспечивающих работу в режиме «маневрирование», и других датчиков промыслово-навигационной информации.
Промысловая прокладка Промысловой прокладкой называется графическое изображение на картах или планшетах пути судна в процессе промысла, горизонтального перемещения ядра облавливаемого косяка рыбы и его контуров (при прохождении над косяком судна с целью его обследования), положения буксируемого трала в тот или иной момент времени после поворота судна. Она включает в себя расчеты и графические построения, связанные с выбором маневров судна, обеспечивающих наведение трала на облавливаемый косяк или обмет его кошельковым неводом. Практически перечисленные выше задачи могут быть решены «вручную» за небольшим исключением только при донном и придонном тралениях, а также при облове разноглубинным тралом малоподвижных косяков пелагических рыб и при некоторых способах замета кошелькового невода. При работе донным тралом и разноглубинным тралом в придонном варианте промысловую прокладку ведут на промыслово-навигационных картах или планшетах. Промыслово-навигационные карты содержат все элементы, присущие путевым навигационным картам, и, кроме того, элементы специальной промысловой характеристики, к которым относятся: задевы и участки с неблагоприятными для траления грунтами; сведения о местах с сильными течениями, затрудняющими работу с орудиями лова; сведения о местах массового развития морских животных и растений, затрудняющих промысел, а также являющихся излюбленной пищей для промысловых рыб или характеризующих гидрологические условия промысла; сведения о местах, которые являются наиболее благоприятными для ведения промысла в различное время года; рекомендованные курсы траления. Промыслово-навигационные карты составляются обычно в масштабах от 1:100000 до 1:200000. При отсутствии промыслово-навигационных карт промысловую прокладку ведут на планшетах, которые составляются и размножаются рыбохозяйственными организациями. Промысловые планшеты строят, как и карты, в проекции Меркатора и в тех же масштабах. При «ручном» ведении промысловой прокладки в дополнение к условным обозначениям, предусмотренным Правилами штурманской службы № 27, используют и специфические обозначения.
Pucунок 1 Пример промыслового маневрирования Промысловая прокладка может вестись на промыслово-навигационных картах или планшетах с помощью специального автопрокладчика. Использование в таком приборе быстродействующих следящих систем, обеспечивающих высокую скорость пробега записывающей головки, автоматического переключателя датчиков информации и вычислительных блоков, позволяет осуществить графическое изображение траектории движения судна (по данным счисления, по результатам практически непрерывных измерений навигационных параметров или по вероятнейшим координатам), трала, ядра косяка пелагических рыб и контуров косяка с учетом его собственного перемещения. На рисунке 1 показан общий вид промысловой прокладки на планшете автопрокладчика прибора ПАМС при разноглубинном траловом лове (прибор разработан в Мурманском высшем инженерном морском училище имени Ленинского комсомола). Обозначения на рисунке следующие: аб — курс траулера при поиске; в1в1 — траектория движения встречного судна; в2 — судно с застопоренной машиной; г1 г2 — косяки рыбы; бд — курс траулера при записи встречных судов и косяков; де — курс сближения по кривой погони; жж1 — траектория движения ядра косяка; ез — рекогносцировочный курс; м — запись конфигурации косяка на рекогносцировочном курсе; зз' — «забег» для спуска трала; з'и — курс траулера при отсутствии контакта с косяком; ик — курс траления после поворота с тралом; лл1 — траектория движения трала после поворота; H — запись конфигурации косяка на курсе траления. При облове разноглубинным тралом или кошельковым неводом косяков рыбы, расположенных в толще воды, когда при выборе курсов судна нет необходимости учитывать характер рельефа дна, грунта и т. п., автоматическая промысловая прокладка на картах или планшетах может быть заменена динамическим отображением основных ее элементов на визуальных электронных индикаторах. На рисунке 1 показано отображение на электронном индикаторе фирмы «Simrad» элементов промысловой прокладки при замете кошелькового невода. В настоящее время разработаны визуальные электронные индикаторы, позволяющие воспроизводить на экране карту района плавания. С помощью таких индикаторов может осуществляться автоматическая промысловая прокладка и при работе донным тралом или разноглубинным тралом в придонном варианте.
Раздел 2 Вопросы для самопроверки 1. Цели и задачи тактики промысла. 2. Предмет тактики промысла. 3. Особенности промысла как производственного процесса. 4. Пути повышения эффективности промысла. 5. Уровни задач управления промыслом. 6. Основные типы задач тактического управления. 7. Роль вычислительной техники в развитии исследования операций. 8. Особенности операционного метода исследования. 9. Основные этапы процесса формирования и режима задачи методом ИСО. Графическое решение задачи Это решение рассмотрим на примере расчета использования грузоподъемности и грузовместимости судна. Сущность этой задачи состоит в определении такого количества груза q1 и q2, которое позволяет использовать чистую грузоподъемность Д(чистая) и грузоподъемность судна W. В зависимости от цели и ограничений постановка задач может иметь различный вид. Определение количества грузов для полного использования грузоподъемности – грузовместимости без учета фрахта за их перевозку, ведется путем совместного решения 2-х уравнений:
u1 и u2 – удельный погрузочный объем, объем занимаемый 1 т. груза Пример:
D=1000т W=1500 м3 q1=1000-q2 0,5(1000-q2)+2q2=1500 500-0,5q2+2q2=1500 500+1,5q2=1500 1,5q2=1000 q2=667т q1=1000-667=333 т Такая постановка задачи является очень жесткой и не учитывает ни возможные ограничения по количеству или объему перевозимых грузов, ни стоимость (фрахт) полученный в результате перевозки этих грузов. Расчет оптимального использования грузоподъемности и грузовместимости осуществляется методом линейного программирования. При этом математическая модель задачи для двух грузов будет иметь вид: 1) q1+q2 £Dч– ограничения по грузоподъемности (2.2.2.) 2) u1q1+u2q2£W – ограничения по грузовместимости (по объему) (2.2.3.)
или
7) L=C1q1+C2q2Þmax (min) (2.2.6.) C1 и C2 – затраты по перевозке 1 т. груза при решении задачи на min; C1 и C2 – оценка фрахта тонны перевозимого груза при решении задач на max. Для графического решения задачи выбираем масштаб построения и в прямоугольной системе координат q1 и q2 производятся следующие построения. Заменяют во всех ограничениях знаки неравенства на знаки равенства и в заданном масштабе строят линии соответствующие этим равенствам. Первых два неравенства дают наклонение линии 1 и 2 (рис.2).
Рис. 2.2 Определение области допустимых решений (ОДР)
На полученных линиях отмечают стрелками полуплоскости, удовлетворяющие неравенствам исходных условий. Проанализировав линии ограничений и полуплоскости их удовлетворяющие, находим область допустимых решений (ОДР). Любая точка в пределах этой области или на ее границах имеет такое значение q1 и q2 , которые удовлетворяют исходным условиям задачи. Для отыскания точки в ОДР для которой целевая функция L будет max(min) первоначальной величине L предписывают положительное число. Используя это число по уравнению L строят предварительную линию, чтобы получить направление целевой функции в системе координат q1 и q2: на рис.2. это линия L¢. Оптимальное решение задачи находят перемещая параллелью самой себе линию целевой функции до самой удаленной от начала координат точки ОДР, если L®max, или наоборот. Координаты найденной точки и есть оптимальное решение задачи, т.е. найденные величины q 01 и q 02 показывают то количество грузов при котором не нарушаются требования исходных ограничений, а целевая функция достигает max или min. На рис. 2. это линии L= max и L= min соответственно. Значение q 01 и q 02 показывает количество грузов при перевозке которых выполняются все условия заложенные в модель задачи и судно будет давать наилучшие показатели работы при данных условиях. Наглядность графического решения позволяет проанализировать при каких изменениях условий работы возможно получение лучших результатов, чем допустимых по данным условиям. При этом ограничения, участвующие в формировании ОДР называются существенными. Поэтому при данных значениях коэффициентов L в первую очередь следует рассмотреть влияние тех линий (ограничений), которые пересекаются в точке – оптимального решения. Поскольку наклон линии целевой функции L зависит от коэффициентов С1 и С2, то отклонение этой линии от границ ОДР показывает, что при некотором изменении С1 и С2 оптимальное решение не изменится.
Пример использования графического метода решения Задачи линейного программирования могут решаться графически, если переменных только 2-е, аналитически (в ручную), при матрицах небольших размеров, автоматически с использованием специальных пакетов программ. Графический метод линейного программирования является наиболее простыми очень наглядным методом решения задач линейного программирования. Рассмотрим применение этого метода на примере расчета оптимальной загрузки судна двумя видами груза. Введем следующие обозначения: q1,q2 - количество принимаемых к перевозке грузов, в тоннах. u1,u2 - удельная грузовместимость, в м3/тонну. Dч- чистая грузоподъемность судна, в тоннах. W- объем грузового помещения судна (грузовместимость), в м3 . C1,C2 - стоимость фрахта за перевозку одного груза, в [у. е.]. Математическая модель задачи:
L=S Ci*Xi ® max (2.3.1.) Ограничения: по грузовместимости судна: q1 + q2 £ Dч (2.3.2.) по грузоподъемности судна: q1 u1 + q2 u2 £ W (2.3.3.)
по массе отдельных грузов: Q1min £ q1 £ Q1max (2.3.4.) Q2min £ q2 £ Q2max
по объему отдельного вида груза: W1min £ u1 q1 £ W1max (2.3.5.) W2min £ u2 q2 £ W2max
Задача решается следующим образом. В декартовой системе координат q1 , q2 , выбирается масштаб построения. На положительной части q1, q2 , обозначаются линии, соответствующие границам неравенств, для чего неравенство превращаем в равенство (т. е. q1 + q2 £ Dч ® q1 + q2 = Dч , и так со всеми остальными неравенствами). На линиях границ обозначим область, удовлетворяющую соответствующим неравенствам. Определим область допустимых решений. Любая точка в ОДР имеет координаты удовлетворяющие условиям задачи. Для определения оптимальных значений q1 и q2 строят направление целевой функции L, и приравнивают её к любому положительному числу. Построя направление L, перемещаем её параллельно самой себе до соприкосновения с самой отдаленной от начала построения точкой ОДР. Координаты этой точки дают оптимальное решение qo1, qo2. После определения qo1, qo2 анализируется полученный результат. Рассмотрим конкретный пример оптимальной загрузки судна двумя видами груза. Dч =1000тонн W =1500м3 u1 = 0,8 м3/тонн u2 = 2,5 м3/тонн Q1min=200 тонн Q2min= 300 тонн Q!max=500 тонн Q2max= 800 тонн W1min=---- м3 W2max=----- м3 W1min=---- м3 W2max-=---- м3 C1= 10 у.е./т C2= 20 у.е./т где / ---- / - означает "нет ограничения".
qo1+ qo2 <1000 (2.3.6.) 0,8qo1+2,5qo2 <1500 (2.3.7.) 200£ qo1 £ 500 (23.8.) 300 £ qo2 £ 800 (2.3.9.)
Математическая модель полной загрузки судна представлена уравнениями (2.3.6.) и (2.3.7.). Решая эти уравнения совместно, найдем количество груза обоих видов, обеспечивающих полную загрузку:
Таким образом, для полного использования и грузовместимости судна, на борт необходимо погрузить 588,235 тонн первого груза qo1 и 411,765 тонн второго груза qo2. То есть: qo1 = 588,235 т qo2 = 411,765 т При этом значение целевой функции будет следующим:
L1 = S Ci*Xi = C1 * q1+ C2 * q2 = 10*588,235+20*411,765 = 14117,65 у.е. Далее производим следующее: наносим оси q1 и q2 в декартовой системе координат; выбираем масштаб построения одинаковый для обеих осей; превращаем неравенства 2.3.6.-2.3.9. в равенства, которые представляют собой уравнения прямых:
qo1+ qo2 =1000 (2.3.10.) 0,8qo1+2,5qo2 =1500 (2.3.11.) 200 = qo1 = 500 (2.3.12.) 300 = qo2 = 800 (2.3.13.) Затем строим эти прямые в декартовой системе и находим область, удовлетворяющую соответствующим неравенствам 2.2.6.-2.2.9. Эта область и является Областью Допустимых Решений (ОДР), любая точка которой удовлетворяет условиям задачи. Целевую функцию L = S Ci*Xi = C1 * q1+ C2 * q2 приравниваем к любому положительному числу – в нашем случае: Lоптх = 10 * q1+ 20 * q2 = 1000, и строим эту прямую. Потом перемещаем ее параллельно самой себе до прикосновения с самой отдаленной от начало построения точкой – в нашем случае это точка "А". Координаты этой точки "А" дают оптимальное решение qo1, qo2. Сняв значения qo1, qo2 , анализируем полученный результат. Для этого находим значение целевой функции при полученных qo1, qo2: qo1 = 500 т qo2 = 440 т L опт = S Ci*Xi = C1 * q1+ C2 * q2 = 10*500 + 20*440 =13800 у.е. Как видно из полученного решения, L1 , равное 14117,65 у.е., больше чем Lопт , равное 13800 у.е., на 317,65 у.е. Это означает, что загрузка судна по Lопт менее выгодна, так как грузовместимость используется полностью, а грузоподъемность еще остается в запасе, что и отражается на величине дохода. Определяющим ограничением в нашем случае является Q1max = 500 т. Если его исключить, то можно подобрать такое решение, при котором можно принять на борт такое сочетание груза q1 и q2 , чтобы добиться оптимального использования грузовместимости и грузоподъемности. Максимально возможное значение целевой функции без ограничений находится в точке В, при q1=588,235т и q2=411,465т, то есть в том случае когда мы оптимально используем и грузовместимость и грузоподъемность судна. Значение целевой функции в точке В: L=14117,65 у.е. При увеличении или уменьшении стоимости С1 и С2 в 10-ть раз (С1 = 100 у.е. и 1 у.е., С2 = 200 у.е. и 2 у.е.) наклон прямой Lопт заметно не изменится, следовательно, найвыгоднейшие условия загрузки будут описываться прежней точкой ОДР и величины qo1 и qo2 останутся прежними, изменится лишь значение Lопт. При С1 = 100 у.е. и С2 = 200 у.е.: Lоптувел. = 100*500 + 200*440 = 138000 у.е. При С1 = 1 у.е. и С2 = 2 у.е.: Lоптумен. = 1*500 + 2*440 = 1380 у.е. При перемене стоимости С1 и С2 наоборот, то есть С1 = 20 у.е. и С2 =10 у.е. наклон прямой Lопт изменится и значение целевой функции возрастет до Lопт = C1 *qo1 + C2 *qo2 = 20*500 + 10*440 = 14400 у.е. Графическое решение задачи представлено на рис.3.
Таблица 1
Таблица 2
Расчеты преобразований матриц или итерации выполняется по следующему алгоритму: В старой матрице (таблица 1): 1. выбирается ключевой столбец с наибольшим отрицательным элементом целевой строки; 2. ключевая строка выбирается по min частному положительному числу величин пробного решения деленных на коэффициент ключевого столбца. Коэффициент пересечения ключевых столбца и строки, выделенные в таблицах, называется ключевым элементом Кэ; В новой матрице (таблица 2): 3. заменяем фиктивную переменную на реальную в ключевых строке и столбце; 4. ключевой элемент заменяется обратной величиной (1); 5. элементы ключевой строки заменяются частичными их деления на ключевой элемент; 6. элементы ключевого столбца заменяют частичными от их деления на ключевой элемент с обратным знаком; 7. все остальные элементы рассчитываются по формуле:
M и N – элементы, находящиеся в противоположных углах прямоугольника, опирающегося на старый элемент (Сэ) и ключевой элемент (Кэ), т.е. M и N – это концы диагонали прямоугольника противоположного Сэ и Кэ. Пример: для столбца пробного решения крайние элементы будут иметь в таблице 2 величины.
Для Преобразование матриц или итерации продолжаются до тех пор, пока все элементы целевой строки не будут положительными. Заключительная симплекс матрица даст решение задачи, т.е. показатели оптимального режима работы траулера. При этом оптимальные показатели решения выбираются следующим образом: А) величины Х01, Х02, Х03 – равны значениям колонки пробного решения при действительных переменных; Б) значения пробного решения в строке L дает оптимальную величину целевой функции. Вопросы для самопроверки
1. Отличие линейного программирования от линейной алгебры. 2.Что такое область допустимых решений задачи линейного программирования. 3. Как находить оптимальное решение задачи с минимумом или максимумом целевой функции. 4. В чем достоинства и недостатки графического решения задачи линейного программирования. 5. Постановка задачи выбора оптимального промыслово-технологического режима работы добывающего судна. 6. Получение первой симплекс-матрицы задачи линейного программирования. 7. Правила преобразования симплекс-матриц при итеративном процессе. 8. Использование результатов преобразования симплекс-матриц. 9. Понятие о двойственной задаче линейного программирования.
Применение теории игр
Наиболее простыми являются игры с участием 2-х игроков, имеющих права на два хода или игры два на два (2х2). В любой игре главным является составление платежной матрицы – это прямоугольная таблица, каждая строка которой представляет собой способ действия одной из сторон, а каждый столбец – действия другой стороны. В пересечении столбцов и строк стоит число характеризующее платеж, т.е. выигрыш одной из сторон и проигрыш другой. Например Возможен лов рыбы в 3-х районах: Район А – 8 тралений В – 6 тралений С – 5 тралений Вылов в тоннах на траление Промысловая обстановка или действия природы
Матрица добычи при различных действиях рыбака и состояниях природы принимает вид. Таблица 6
Существует несколько способов решения задач теории игр. 1 способ: Определяем седловую точку матрицы. Если в матрице есть цифра, которая наименьшая в своей строке и наибольшая в своем столбце, то эта клетка и есть седловая точка матрицы. Она является решением игры, т.е. определяет разумные действия обоих противников. Цифровые значения седловой точки есть цена игры (цена игры – это то значение выигрыша одной из сторон и проигрыша другой стороны, которые получат оба игрока при разумных действиях). Это max из min выигрышей рыбака, а у противника это min из max проигрышей. 2 способ: Если в матрице нет седловой точки, то сначала отбрасываются невыгодные или выгодные (доминирующие) одному из противников действия. При наличии седловой точки, такой способ приведет к этой точке. Отбрасывание доминирующих стратегий максимально упрощает матрицу. В таблице 6 приведено решение задачи методом седловой точки. Это решение показывает, что лучшими условиями обеих игроков являются для рыбака район В, для природы – плохие уловы. Цена игры 18 т. Аналогичное решение получим путем исключения для природы заведомо невыгодной стратегии – хорошие уловы, а потом средние уловы. В оставшемся столбце рыбак, естественно, выберет работу в районе В, поскольку лучше ловить по 18 т, чем 8т или 10 т. Решение матрицы 2х2, не имеющей седловой точки, рассмотрим на примере. Пример № 2: Таблица 7
матрица не имеет седловой точки: Для природы действие «плохой улов» явно лучше «хорошего улова» при любых действиях Рыбака. В оставшейся матрице 3х2 Рыбаку явно невыгодно применять пелагический трал. Матрица 2х2 принимает вид. Таблица 8
Чистой стратегии для выигрыша нет, и действия необходимо применять с определенной частотой. Частоты применения стратегий рассчитывается по формулам. Задачу выбора смешанных действий или стратегий можно решить также по следующему алгоритму: v Вычесть числа 1-ой строки из большего меньшее и записать результат напротив второй строки; v Вычесть из большего меньшее второй строки и результат записать напротив 1-ой строки. Отношение этих чисел дает частоту применения стратегий рыбака: Р1=2/3; Р2=1/3 . За природу частоту можно определить поступив точно также со столбцами. Графическое решение этой задачи можно выполнить по схеме.
Рис. 2.5. Графическое определение частот.
Цена игры по смешанным стратегиям определяется по следующим формулам:
По нашему примеру:
При смешанных стратегиях действия игроков выполняются с заданной частотой случайным образом, используя компьютерное получение случайных чисел с заданной частотой или другой случайный выбор. Формула для определения частоты:
Полученное методом теории игр решение дает наиболее осторожные действия промысловика при которых он получает min, но гарантированные результаты.
Вопросы для самопроверки 1. Представление промысла как конфликтной ситуации. 2. Сущность задачи теории игр. 3. Методы решения задач теории игр. 4. Решение задач теории игр размером 2х2 различными способами. 5. Применение результатов решение задачи теории игр.
Вопросы для самопроверки 1. Отличие теории статистических решений от теории игр. 2. Расчеты вероятностей состояния природы. 3. Постановка задачи о целесообразности местного поиска. 4. Матрица добычи и матрица сожалений в задаче о целесообразности местного поиска. 5. Расчеты рисков и показателя целесообразности поиска. 6. Расчеты допустимых значений параметров поиска. 7. Определение целесообразности перехода в новый район. 8. Критерий min-max сожалений. 9. Расчеты перехода с учетом промысловой выдержки.
Вопросы для самопроверки 1. Промысловые системы массового обслуживания. 2. Характеристика потока требований. 3. Особенности обработки требований в различных системах. 4. Основные критерии работы систем массового обслуживания. 5. Приведенные потери времени простоев. 6. Расчеты различных значений времени простоев. 7. Сущность задачи о выборе оптимальной системы обработки судов в море. 8. Построение и использование графиков приведенного времени простоев. 9. Расчеты показателей работы простейших систем обработки судов. 10. Определение суммарных потерь системы в единицу времени. 11. Анализ работы различных систем обработки судов.
2.6. Основы управления запасами
Основные понятия
Различный режим работы промыслового судна создается при изменении технологической схемы обработки одного улова или обработке по одинаковым технологическим схемам различных по величине и видовому составу уловов. Поэтому даже в одном районе судно может работать в нескольких промыслово-технологических режимах. Причем выбор промыслового режима также невозможен без учета ограничений обусловленных реальной промысловой обстановкой и технологическими возможностями обрабатывающей подсистемы. Для крупнотоннажного траулера можно выделить 3 типовых режима обработки рыбы: 1. п ри хорошей промысловой обстановке длительность цикла лова всегда меньше длительности цикла обработки улова за траление tл< tобр tл=tп+tт+tв<tобр (6.1.1.) t – этапы добычи рыбы tл – время лова tобр – время обработки всего улова tп – длительность постановки трала tт – длительность чистого траления tв – время выборки и выливки улова Применение алгоритма Литтла
Сокращение добывающего флота и флота обработки поставило перед судами рыбной промышленности задачу по выбору маршрута для обхода нескольких точек с целью поиска рыбы или снятия рыбопродукции и т.д. Задачи подобного типа решаются в математике методом ветвей и границ, с использованием алгоритма Литтла. Трудность задач данного типа в том, что число возможных маршрутов равно (n-1)!. Постановка задачи заключается в следующем: имеется n точек, каждую из которых необходимо посетить всего один раз, выходя из начального пункта и придя в конечный. При решении задач для судна на переходах необходимо учитывать действие течений и метеорологические условия. Возможное время нахождения в разных точках можно не учитывать, если оно не зависит от порядка их посещения. Таким образом, в задаче требуется найти минимальный путь обхода всех заданных точек. Решим подобную задачу, показав тем самым пример использования алгоритма Литтла. Исходные данные:
Используемая карта: № 32202 Начальная точка (П1): jн=39000¢N lн=25000¢Е Конечная точка (П2): jк=39020¢N lк=25000¢Е Пункты назначения, которые необходимо посетить: 1. о. Комби; 2. м. Трипити; 3. м. Сигри; 4. о. Ворио-Поди; 5. о. Псатура. Составляем матрицу № 1, в которую записываем расстояния между всеми районами. Знак «¥» введен для того, чтобы исключить такой выбор части маршрута, как 1®1, 2®2, 3®3, 4®4 и 5®5, а также чтобы запретить переход из П1 в П2. Затем проделаем операцию приведения исходной матрицы № 1. Эта операция заключается в том, что из всех чисел строки мы вычтем минимальное число той же строки. Такое действие эквивалентно тому, что район этой строки условно приближается ко всем другим районам на эту величину. При этом отношение порядка между расстояниями не меняется, то есть разница в путях до всех районов, указанных в строке, остается неизменной. Отношение порядка также сохраняется, если в каждом столбце из всех чисел вычесть минимальное число того же столбца. Как видно из матрицы № 2, после приведения по строкам в каждой ее строке теперь имеется нулевое значение. Так как в столбцах 1 и 3 отсутствуют нули, то произведем операцию приведения по столбцам и получим матрицу № 3. Матрица № 1 Матрица № 2
Матрица № 3
Во время приведения по строкам и столбцам мы условно уменьшили расстояние на величину, равную n= Сумма 1+Сумма 2=157+22=179 миль. Это значит, что какой бы маршрут не был избран, оценка его нижней границы критерия эффективности не может быть менее 179. В матрице № 3 в ячейках с нулевыми значениями в правом верхнем углу записаны величины штрафов за не использование каждого нулевого элемента. Штраф определяется суммированием минимальных элементов, колонки и строки которых пересекаются в данной клетке. Например: Р(2-П2)=0+9=9 Эта цифра показывает, сколько лишних миль мы пройдем, если не выберем данный маршрут. Каждый маршрут разбиваем на два подмножества и рассчитываем расценки затрат в каждом подмножестве. Например:
Из расчета видно, что если мы не будем следовать этим маршрутом, то пройдем дополнительно 9 миль. Так как для нулевой клетки 4-5 штраф самый большой (23 мили) по сравнению с другими нулевыми клетками, то этот маршрут необходимо обязательно использовать. Аналитически это выполняется, если исключить из матрицы № 4 строку и колонку, содержащие эту ячейку. Одновременно надо запретить включать в дальнейшие решения путь 4-5, если такой путь еще остался в матрице после сокращения, то есть на пересечении строки и столбца 5-4 ставится знак ¥. Произведем описанные действия и получим матрицу № 4. В полученной матрице в строке 4 отсутствуют нулевые значения, поэтому применим операцию приведения и получим матрицу № 5. Во время приведения мы еще условно уменьшили расстояние на 6 миль и общее уменьшение теперь составило 179+6=185 миль.
Матрица № 4 Матрица № 5
В матрице № 5 самый большой штраф – для клетки П1-4. Поэтому исключаем из матрицы № 5 строку П1 и столбец 4. Получаем матрицу № 6, в которой в столбце 3 отсутствует нулевое значение. После приведения получаем матрицу № 7, а общее условное уменьшение увеличивается на 6 миль, то есть 185+6=191 миля. Матрица № 6 Матрица № 7
В матрице № 7 наибольший штраф – для ячейки 1-3, поэтому вычеркиваем строку 1 и столбец 3, одновременно запрещаем выбор маршрута 3-1. Таким образом, получаем матрицу № 8, у которой в столбце 1 отсутствует нулевое решение. Снова применяем операцию приведения и получаем матрицу № 9. При этом общее условное уменьшение увеличивается еще на 9 единиц и теперь оно составляет 191+9=200 миль, то есть какой бы маршрут не был выбран, оценка его нижней границы критерия эффективности не может быть менее 200 миль. Матрица № 8 Матрица № 9
В матрице № 9 находятся две нулевые ячейки с одинаковым максимальным значением штрафа: 3-П2 и 5-2. Выбираем ячейку 5-2 и вычеркиваем строку 5 и столбец 2. Одновременно запрещаем переход 2-П2, так как это привело бы к окончанию вычислений, а у нас остался неиспользован еще один переход. Так получается матрица № 10. Матрица № 10
Из матрицы № 10 выбираем маршрут 2-1, после чего выбираем оставшийся маршрут 3-П2. Таким образом, мы получили следующие наивыгоднейшие маршруты: 4-5; П1-4; 1-3; 5-2; 2-1; 3-П2 Расположив их в порядке следования получим следующее: П1®4®5®2®1®3®П2 25+31+37+23+45+39=200 миль Полученный результат совпадает с оценкой нижней границы критерия эффективности и является наиболее оптимальным из всех возможных вариантов. Примечательно также и то, что в данном случае совпадает как результат, полученный при использовании алгоритма Литтла, так и результат, который мы получили, если бы выбрали путем подбора, то есть, если бы интуитивно выбирать на каждом этапе маршрута по минимуму расстояния на отрезке пути. Алгоритм Литтла не является самым оптимальным по отношении к количеству общей вычислительной работы, но он, несомненно, лучше, чем простой перебор всех возможных решений. Основные понятия
Решение многих задач промысла можно разделить на этапы, или шаги, последовательность которых представляет весь процесс принятия в целом. каждый этап позволяет выбор различных действий, называемых у п р а в л е н и я м и, каждое из которых, переводит процесс принятия решений на следующий этап и может быть оценено некоторой функцией –выигрышем. Цель, преследуемая в задаче, - максимизация этой функции в целом после всех этапов принятия решений. Критерий эффективности для такого рода задач должен обладать свойством а д д и т и в н о с т и, т.е. эффективность всего решения (полного набора управлений по всем этапам) должна быть равной сумме эффективностей решений на каждом этапе. При этом, если принимается некое управление на i-м этапе, то оценка его эффективности не зависит от того, каким образом решение задачи подошло к такому моменту. задачи, удовлетворяющие указанным условиям, решаются методом – д и н а м и ч е с к о г о п р о г р а м м и р о в а н и я. Это – особый метод, вытекающий из общей теории оптимального управления, разработанной коллективом математиков во главе с академиком Л.С. Понтрягиным. Однако заслуга в разработке динамического программирования принадлежит Р. Беллману. Название «динамическое», не очень удачное, поскольку слово «динамическое» предполагает какое-то движение исследуемого объекта. В то же время задачи, к которым прилагается метод, могут быть чисто статическими, а динамизм прививается им искусственно введением понятия ф а з о в о г о п р о с т р а н с т в а и оптимальной траектории в этом пространстве. Все сказанное выше, нуждается в пояснении. Сначала сделаем это в абстрактной форме, а затем – на конкретных примерах. Имеется некоторый объект (или система) S, у которого можно различать его с о с т о я н и я. Пусть можно как-то воздействовать на объект, заставляя его менять свои состояния. Такой объект будем называть у п р а в л я е м ы м объектом (или системой), а способ воздействия на него – у п р а в л е н и е м U. Пусть с объектом связана некоторая величина W, которую мы будем называть в ы и г р ы ш е м, так что каждому управлению соответствует своя величина выигрыша: Задача состоит в том, чтобы найти Uопт, т.е. о п т и м а л ь н о е управление, при котором
Если при этом указаны начальное и конечное состояния объекта (системы), то рассматривается весь путь из начального в конечное состояние. В некоторых случаях конечное состояние явно не задается, а должно быть найдено по максимуму выигрыша. Сказанное дает понятие об общей постановке задачи оптимизации управления.
Планирование использования супертраулеров при автономном ведении промысла в отдаленных районах
Рассмотрим типичную для современного промысла задачу использования шести супертраулеров в автономном промысле в Юго-Западной Атлантике со сдачей продукции в портах прибрежных государств. Перспективными считаются четыре района промысла. Предварительные экономические расчеты, основанные на математическом ожидании улова, его породном составе, видах готовой продукции, рыночных и контрастных ценах, расстояниях до портов, где продукция реализуется, эксплуатационных расходах и прочем, сведены в таблицу. Она представляется лицу, уполномоченному принять окончательное решение: как распределить супертраулеры по районам промысла, чтобы прибыль от этой операции была максимальной. Естественно, что вначале приходит решение послать все шесть супертраулеров в район № 1, что дает валютную прибыль 204 десятка тысяч. Это решение можно условно записать в таком виде (6, 0, 0, 0). Но после небольшого раздумья управляющий увидит, что решение (1, 1, 2, 2) лучше: оно дает прибыль 56+50+50+66=222 десятка тысяч. Попытка получить еще лучшее решение увенчалась успехом. Решение (1, 2, 1, 2)дает прибыль 234 десятка тыс. ед. Проверка еще одного решения (2, 1, 2, 1) показывает, что оно хуже предыдущего (90+50+40=230). Другие варианты решения также уступают решению (1, 2, 1, 2). Казалось бы, что это решение наилучшее: по сравнению с самым первым оно дает на 300 тысяч больше. Возможно поискать другое решение или просчитать все 256 вариантов.
Таблица ожидаемой прибыли (в десятках тысяч единиц СКВ)
Рассчитаем, что даст динамическое программирование. Прежде всего учтем, что в этой задаче конечное состояние не определено: его надо найти по максимуму прибыли всей операции. Разделить решение на этапы можно по-разному. Остановимся на следующем распределении:
Общее число состояний на первом этапе будет равно семи: можно послать в этот район 0, 1, 2, 3, 4, 5 и 6 супертраулеров. Ясно, что оптимум для этих решений (управлений) определится первым столбцом ожидаемой прибыли. На втором этапе число состояний также будет равно семи, но эти состояния, генерализованы, т.е. обобщены. Действительно, посылка двух супертраулеров в район № 2 соответствует следующему распределению в обоих районах: (0, 2), (1, 2), (3, 2), (4, 2). На третьем и четвертом этапах число состояний на каждом этапе также равно семи, но эти состояния еще более генерализованы: посылка четырех супертраулеров в район № 3 на третьем этапе охватывает следующие состояния в целом: (0, 0, 4), (1, 0, 4), (2, 0, 4), (0, 1, 4), (0, 2, 4), (1, 1, 4). Для этой задачи общий порядок решения, описанный ранее, непригоден: мы не знаем конечного состояния системы, соответствующего оптимуму. Но общие принципы должны сохраняться. Аддитивность выбранного критерия очевидна. Зависимость оценок от предыстории учтена в тщательно подготовленной таблице ожидаемой прибыли: расчеты показывают, что посылка четырех судов в район № 1 не дает в 2 раза больше прибыли по сравнению с посылкой двух судов в тот же район. Следовательно, задача вполне разрешима методом динамического программирования. Учтем то, что в этой конкретной задаче условные и безусловные оптимальные управления (и прибыль) совпадают. Следовательно, остается только вычислить максимум условной прибыли и задача будет решена. В такого рода задачах безразлично, откуда начинать расчеты. В нашей задаче организация расчетов будет проще, если мы начнем их с первого этапа. Этап I Расчет прибыли от распределения супертраулеров в районе № 1
Результаты расчетов на этапе I несколько банальны и приводятся лишь в методических целях. Этап II Этап III Расчет прибыли от распределения супертраулеров в районах №1, 2, 3
Таким образом при распределении шести супертраулеров сумма 212+30>240+0. Это значит, что оптимальным вариантом для распределения шести судов является такой, который включает посылку одного судна в район № 3. На долю районов № 1 и 2 остается пять судов. А согласно расчетам на втором этапе в этом случае оптимальным распределением по первым двум районам являются (3, 2). Оптимальное распределение по трем районам, следовательно, будет (3, 2, 1), что соответствует прибыли 242. Этап IV Расчет прибыли от распределения супертраулеров по районам № 1, 2, 3, 4
Итак, оптимальное распределение шести траулеров по четырем районам найдено. Оно оказалось на 180 тысяч лучше решения, найденного интуитивным подбором: (1, 2, 1, 2). Обращает на себя внимание, что в ходе решения задачи получены промежуточные результаты, которые весьма существенны для лица, принимающего решения. Вот один из них. С ростом числа траулеров прирост прибыли имеет тенденцию к снижению. Поэтому, если в запасе есть какой-либо вариант (например, возможность послать траулер в район Юго-Восточной Атлантики), который экономисты оценивают прибылью в 36 десятков тыс. усл. валютных ед., имеет смысл не просто посчитать, что вариант – 5 траулеров в районе Юго-Западной Атлантики, а шестой в районе Юго-Восточной Атлантики – самый лучший, поскольку увеличивает прибыль на 40 тыс. усл. валютных ед., а надо з а н о в о п е р е с ч и т а т ь всю задачу. Вернее, решить задачу новую: распределение шести траулеров по пяти районам. Вполне вероятно, что новый оптимум окажется значительно более выгодным. В случае, когда в условиях задачи требуется распределить только четыре супертраулера, мы получим два равнозначных по прибыли решения. Управляющий может выбрать одно из них, принимая во внимание факторы, не вошедшие в модель задачи. Необходимо отметить, что решение задач методом динамического программирования требует большой предварительной работы группы квалифицированных экономистов. Только экономисты могут подсчитать оценки эффективности, которыми будет оперировать впоследствии специалист по ИСО. Еще лучше, когда экономисты будут знакомы с методами ИСО – им яснее будет то, что в действительности нужно для оценки эффективности принимаемых решений. Понятие о методе динамического программирования и его применении было разъяснено на примерах детерминистических задач. Но в первой из них существенное значение имеет оправдываемость метеорологического прогноза, надежность предвычисления течений, элементов волнения, дрейфа и т.д.; во второй – надежность прогноза уловов, на которых основывалась исходная таблица ожидаемой прибыли. Можно было заметить, что некоторые не очень большие изменения данных в этой таблице не сказываются на оптимальности управления, хотя и меняют итоговую прибыль. Иными словами, найденное оптимальное управление остается оптимальным, даже если исходные данные несколько варьируются. Но есть реальные задачи, где исходные данные носят чисто вероятностный характер и искусственное придание им детерминистического характера путем перехода к математическим ожиданиям не сулит успеха. Динамическое программирование эффективно и в этих случаях. Разумеется, оно при этом усложняется, превращаясь в так называемое стохастическое динамическое программирование. Важно отметить, что динамическое программирование есть метод оптимального управления. Именно это обстоятельство делает необходимым изучение его управляющими лицами. Конечно, им не придется выполнять утомительные вычисления самим. Для этого есть специалисты и вычислительные центры. Но знание существа этого метода поможет управляющему правильно ставить задачи и даже активно участвовать в составлении модели задачи, ибо у него есть большой опыт и лучшее, чем у специалистов по ИСО, понимание существа конкретной проблемы (по крайней мере, на начальной стадии операционного проекта). Применение динамического программирования требует определенных и иногда немалых затрат. Так, например, во второй задаче изучение рынка сбыта рыбной продукции в Африке и Южной Америке может быть в свою очередь потребует некоторых затрат валюты. Но эти затраты окупятся за счет получения подлинно оптимального решения.
Вопросы для самопроверки 1. Понятия состояние управляемого объекта и оптимальное управление. 2. Порядок расчетов оптимального решения в общем виде. 3. Условия применения общего порядка расчетов. 4. Цель задачи оптимального перехода через океан. 5. Граф задачи оптимального перехода через океан. 6. Порядок расчетов с использованием граф задачи. 7. Постановка задачи распределения траулеров и района промысла. 8. Расчет различных вариантов распределения траулера. 9. Расчет оптимального варианта распределения траулеров. 10. Использование результатов расчета. З А К Л Ю Ч Е Н И Е .
В конспекте лекций представлены основные методы решения задач для оптимального управления на промысле. Конечно, это не все известные методы, но примеры их использования наиболее ясно показали насколько выгоднее, имея одинаковые исходные данные, можно решать основные задачи управления с достижением большого экономического эффекта. Кто-то может возразить, что некоторые методы достаточно громоздкие и трудоемкие, но, при возможностях современных вычислительных технологий, наличие множества итераций при решений той или иной задачи уже не представляет каких-либо трудностей. Конечно, полностью автоматизированных систем на промысле нет, да и вряд ли есть такая необходимость. В создающихся сейчас автоматических системах управления флотом на промысле человек не исключается из управления, его роль в нем остается центральной. Человек, хоть и уступает вычислительным машинам в точности счета и быстродействии, но он превосходит их в умении справляться с учетом неформализуемых факторов, в умении находить решение, пусть и не всегда наилучшее, в ситуациях, в которых машина вообще никакой пользы принести не может. Существуют ситуации, в которых решение определенной задачи возможно и машиной без человека и человеком без помощи машины, но если человек и машина находят решение для них совместно, то эффективность такого решения выше, чем простая сумма эффектов независимых решений. Чаще всего участие человека в управлении системой выражается в том, что он определяет, какая именно модель соответствует сложившейся ситуации, и поручает нахождение решения машине в соответствии с этой моделью. Затем человек корректирует машинное решение, учитывая те факторы, которые не могли быть четко определены и включены в модель. Если необходимо, он несколько изменяет, входные данные и вновь поручает решение машины. Наконец, утверждение полученного решения и мероприятия по приведению его в жизнь всегда были и остаются прерогативой человека как главного звена управления. Таким образом, для того чтобы правильно использовать методы оптимального управления промыслом необходимо четко понимать какой метод для какого типа задач является самым подходящим и даст наиболее точное решение. Ведь современное техническое оборудование судов часто обеспечивает значительно больший выход продукции, чем это получается в среднем за промысловые сутки. Также эффективность промысла зависит и от промысловой обстановки, которой мы управлять не можем. Следовательно, при решении возникающих проблем, надо учитывать наиболее существенные из имеющихся ограничений и понимать зависимость между входными данными и результатами расчета, чтобы, при получении невыгодного для промысловиков решения, можно было, путем изменения всего лишь нескольких параметров, добиться наибольшего экономического эффекта. Опыт показывает, что практическое применение рассмотренных выше методов решения повышает производительность работы отдельных судов на 15-25%. При этом надо учитывать, что повышение идет без дополнительных материальных затрат, лишь за счет более квалифицированного решения вопросов управления, оптимальной организации производства на отдельных этапах. Естественно, что даже небольшой процент повышения эффективности для группы судов приведет к улучшению работы отрасли. Выше приведены методы решения задач управления промыслом с использованием различных математических моделей. Эти методы пригодны для решения задач на судне любого типа независимо от района промысла и вида облавливаемого объекта. Для аналитического решения необходимо лишь подобие реальной ситуации выбранной модели и количественной оценки всех учитываемых факторов. Во введении и первых параграфах каждого раздела рассматривается общий подход к решению задач управления, что поможет читателям попытаться самостоятельно разработать методы решения тех задач, которые не изложены в конспекте. Методы оптимального управления промыслом будут развиваться, и это развитие будет идти тем быстрее, чем большее число специалистов будет участвовать в их разработке. Наличие математических моделей является непременным, хотя и недостаточным условием успешной автоматизации управления. Внедрение на судах вычислительной техники значительно облегчает работу промысловиков в части решения задач управления. Больше того, решение задач на ПК позволяет «проигрывать» различные варианты промысловой обстановки, анализировать последствие различных управленческих действий. Значительная работа предстоит также в обучении специалистов научным методам решения задач управления. Выпускники вузов отрасли знакомятся с основами математического моделирования задач управления или экономико-математическими методами на специальных курсах. Однако сейчас этого мало. Нужна более глубокая проработка основных методов по специальной литературе, специальные дисциплины по оптимальному управлению промыслом для судоводителей и других специалистов. Это одна из сторон расширения и углубление экономического образования специалистов.
Основная литература: • 1. Ольховский В.Е. Навигация и промысловая навигация./ В.Е. Ольховский. – М.: Пищевая промышленность, 1979 –344 с. • 2. Наставление по организации штурманской службы на морских судах флота рыбной промышленности СССР. - Л.: Транспорт, 1987 –136 с. 3. Андреев М.Н Оптимальное управление на промысле / М.Н Андреев, С.А. Студенецкий. - М.: Пищевая промышленность, 1975. -242 с. 4. Ольховский В.Е. . Автоматизация промыслового судовождения и тактическое управление промыслом / В.Е. Ольховский, М.Н. Андреев - М.: Пищевая промышленность, 1970.- 278 с. 5. Мартыненко В.Г. География морского судоходства / В.Г. Мартыненко, Н.Н. Цымбал - Одесса: Феникс, - 2006. - 247 с. 6. Пазынич Г.И., Тишинский В.С. Элементы тактики тралового лова / Г.И. Пазынич, В.С. Тишинский – Калининград: Кн. Издательство, - 1976. - 136 с. 7. Козин М.А. Управление промыслом: проблемы, решения / М.А. Козин, А.А. Кутуев, Г.И. Пазынич – Калининград: Кн. Издательство, - 1987. - 145 с.
Дополнительная литература: 8. Исследование операций т 1.2 М.: «Мир», 1981.- 167 с. 9. Вентцель Е.С. Исследование операций /Е.С.Вентцель. М.- Радио, 1972. – 255 с. 10. Алексишин В.Г. Обеспечение навигационной безопасности. / В.Г. Алексишин, Л.А. Козырь, С.В. Симоненко. –Одесса, Мосува : Изд. «Феникс», «Транслит», - 2009 – 517 с. 11. Михалов В.С. Обеспечение навигационной безопасности плавания./ В.С. Михайлов, Кудрявцев В.Г., Соколовский Д.А./ -Киев. ДВПП «Компас», -2010 – 567 с. Конспект лекций для курсантов специальности 26.05.05 «Судовождение» очной и заочной форм обучения Тираж______экз. Подписано к печати______________ Заказ №________ Объем 5,79 п.л. Изд-во ФГБОУ ВО «Керченский государственный морской технологический университет» 298309 г. Керчь, Орджоникидзе, 82. * Величина L может быть рассчитана по формуле L = L В + L К , где LB — горизонтальная проекция ваера, a LK — длина кабеля. Приближенно LB = * ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ «КЕРЧЕНСКИЙ ГОСУДАРСТВЕННЫЙ МОРСКОЙ ТЕХНОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ»
Кафедра «Судовождение и промышленное рыболовство»
Пазынич Г.И.
ПРОМЫСЛОВАЯ НАВИГАЦИЯ
КОНСПЕКТ ЛЕКЦИЙ
для курсантов специальности 26.05.05 «судовождение» ОЧНОЙ и заочной форм обучения
Керчь, 2016 г.
СОДЕРЖАНИЕ
Стр. Предисловие 4 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2019-03-20; Просмотров: 577; Нарушение авторского права страницы

 (2.2.1.)
(2.2.1.)
 ограничение по количеству отдельных грузов (2.2.4.)
ограничение по количеству отдельных грузов (2.2.4.) ограничение по объему отдельных грузов (2.2.5.)
ограничение по объему отдельных грузов (2.2.5.)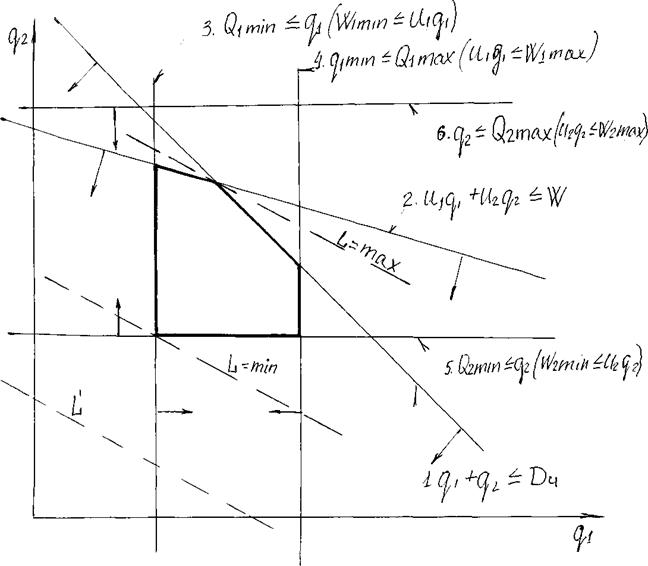








 (2.4.1)
(2.4.1)



 - цена игры (3.2.1.)
- цена игры (3.2.1.) (3.2.2.)
(3.2.2.)
 (3.2.3.)
(3.2.3.) (3.2.4.)
(3.2.4.)




 , где l — длина вытравленного ваера, H — глубина в месте промысла (донный трал) или горизонт хода трала (разноглубинный трал). Более точно L в вычисляется по формуле L В = L ´В+Δ L ., где L ′ B
, где l — длина вытравленного ваера, H — глубина в месте промысла (донный трал) или горизонт хода трала (разноглубинный трал). Более точно L в вычисляется по формуле L В = L ´В+Δ L ., где L ′ B