
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Сближение с быстроподвижным локальным косяком пелагических рыб и определение элементов его горизонтального перемещения
Рис. 1.5. Расчет выхода на косяк Важно подчеркнуть, что определение элементов горизонтального перемещения локального косяка пелагических рыб с достаточной для решения задач промысловой навигации точностью может быть выполнено только при помощи современных рыбопоисковых ГАС, обладающих высокой разрешающей способностью не только по расстоянию, но и по направлению, а также дающих возможность выделять центр плотности - ядро косяка.
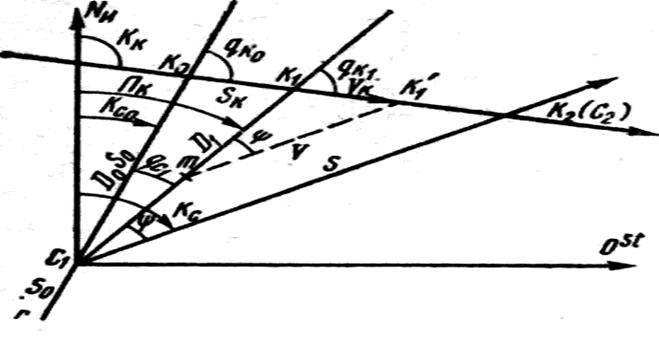
При кошельковом лове сближение с косяком предполагает выход судна на позицию начала замета невода, а при разноглубинном траловом лове в зависимости от применяемой тактики промысла либо выход судна на косяк без трала для обследования косяка эхолотом (вертикальным трактом ГАС), либо в точку поворота на курс траления, обеспечивающий наведение трала на косяк в плоскости горизонта. К последнему варианту прибегают в тех случаях, когда на курсе сближения определена с помощью горизонтального тракта ГАС глубина залегания косяка с учетом рефракции звуковых лучей в морской воде. Зная достаточно точно эту глубину, можно сразу же с курса сближения выйти на курс траления, обеспечивающий наведение трала на косяк в плоскости горизонта, и заблаговременно вывести трал на нужную глубину. Элементы горизонтального перемещения плотного локального косяка пелагических рыб могут быть определены при сближении с косяком на прямых курсах или при сближении с косяком по кривой погони (судно в процессе сближения с косяком непрерывно удерживает его ядро — центр плоскости — на курсовом угле qc = 0). Задачу сближения судна с косяком на прямых курсах рассмотрим с предварительным приведением ядра косяка на курсовой угол qс = 0. В момент Т0 сразу же после разворота судна на ядро косяка, имеющего промысловое значение, запускают секундомер и с помощью ГАС определяют расстояние D0 до ядра косяка (рис. ). Следуя этим курсом примерно в течение 3 мин, в момент Т1 вновь определяют с помощью ГАС расстояние D1 до ядра косяка, а также курсовой угол qC1 с судна на ядро косяка. На рисунке точки С0 и Ко — соответственно места судна и ядра косяка в момент T0 (судно повернуло на косяк и его курс совпадает с пеленгом на ядро косяка), а точки С1 и К1 — соответственно места судна и ядра косяка в момент Т1 определения D1 и qc1; qк0 и qK1—углы между линией перемещения косяка и линиями пеленгов на косяк в моменты Т0 и Т1. При «ручной» обработке информации элементы горизонтального перемещения косяка и курс судна для выхода на его ядро (сближения вплотную) могут быть определены графически методом истинной или относительной прокладки, а также при помощи специальных таблиц. Истинную прокладку выполняют на промыслово-навигационном планшете или на листе бумаги следующим образом. От счислимого места в начальный момент Т0 следования первым курсом сближения (точка С0) откладывают по линии первоначального пеленга на ядро косяка расстояние D0 и отмечают точку Ко — положение ядра косяка относительно судна в момент Т0. Через некоторый промежуток времени в момент Т1 прокладывают счислимое место судна на этот момент (точка С1) и по курсовому углу qC1 и расстоянию D1 наносят новое положение ядра косяка относительно судна (точка С1). Судно начинает поворот в сторону ядра косяка, а в это время продолжают дальнейшие построения. Точки Ко и К1 соединяют прямой линией и находят направление горизонтального перемещения (курс) ядра косяка Кк, величину этого перемещения (путь) SК1 за промежуток времени t = Т1 — Т0 и скорость перемещения косяка Vk=
Рис. 1. 6. Истинное и относительное движение Скорости абсолютного, относительного и переносного движений связаны, как известно, следующим соотношением:
За неподвижную систему координат примем прямоугольную декартову систему координат, неподвижно закрепленную на местности. За начало неподвижной системы координат примем судно М. Тогда собственное движение судна М относительно местности будет переносным, собственное движение объекта маневра К (ядра косяка) относительно местности абсолютным, а относительно судна М относительным движением. Для того чтобы определить, по какому направлению и с какой скоростью перемещается объект маневра К (ядро косяка) относительно судна М, перейдем от абсолютного движения к относительному (заменим два движения одним).
П
Рис. 1.7. Относительное движение косяка Предположим, что судно М следует курсом Км со скоростью Ум, а косяк курсом Кк со скоростью У„. В начальный момент взаимное положение судна и ядра косяка определяется пеленгом П1 и расстоянием £>1 (рис. 182). Через некоторый промежуток времени судно и ядро косяка переместятся соответственно в ТОЧКИ Мг и /Сг- Их новое взаимное положение определяется пеленгом Я2 и расстоянием й2. Отложим отточки М2 путь ядра косяка 5К в сторону, обратную его перемещению, и отметим точку К[. Тогда, соединив точку К] с точкой Ми получим 50тн — относительный путь. Треугольник МхМгК^ . сторонами которого являются векторы пути судна, косяка и вектор относительного пути, называется треугольником путей. Если промежуток времени ^, для которого построен треугольник путей, принять за единицу, то последний превратится в треугольник скоростей. За единицу времени можно взять и любой промежуток времени. Во всех случаях треугольник скоростей и треугольник путей подобны. Сторонами треугольника скоростей будут векторы скорости судна, ядра косяка и вектор относительной скорости. В треугольниках скоростей и путей векторы скорости пути маневрирующего судна и объекта маневра всегда направлены в сторону их движения, а векторы относительной скорости и относительного пути — по линии относительного курса. Линия К20 будет представлять собой новую линию относительного движения ЛОД\. Затем из конца вектора скорости горизонтального перемещения ядра косяка Ук проводят прямую, параллельную этой новой линии относительного движения в сторону точки К2- Точку Пі пересечения этой прямой с окружностью планшета, соответствующей в выбранном масштабе скорости судна Ум. соединяют с центром планшета О. Направление вектора Оп] определит курс Кс, на который следует лечь в момент Т2, чтобы выйти на косяк (сблизиться с его ядром вплотную). Если ядро косяка предварительно приводят на курсовой угол <7с = 0, то после определения элементов горизонтального перемещения косяка из конца вектора Ук проводят прямую линию в направлении, обратном второму пеленгу на ядро косяка, и точку п пересечения этой линии с окружностью планшета, соответствующей в выбранном масштабе скорости судна Км, соединяют с центром планшета О. Направление вектора Оп определит курс сближения судна с ядром косяка /Сс. Недостаток метода сближения с подвижным локальным косяком пелагических рыб на прямых курсах заключается в том, что этот метод предусматривает обязательно маневрирование курсом судна в течение первых 3—6 мин с момента обнаружения косяка. При малых дистанциях обнаружения и значительной подвижности косяка судно может оказаться далеко в стороне от ядра косяка и выход на курс сближения с ним вплотную будет затруднен, так как потребуется быстрый поворот на большой угол. При сближении с косяком по кривой погони судно движется, удерживая ядро (центр плотности) косяка прямо по носу — на курсовом угле <7С = 0. Очевидно, что при таком методе сближения курс судна в любой момент времени совпадает с пеленгом на ядро косяка. Метод сближения по кривой погони обладает рядом существенных преимуществ: значительно упрощается работа гидроакустика при определении направления на ядро косяка вследствие сравнительно медленного изменения пеленга и уменьшается вероятность потери контакта или ошибочного перехода на наблюдения ядра другого, близко расположенного косяка; от быстрого уменьшения расстояния до ядра косяка снижается ошибка измерения этого расстояния; исключается необходимость быстрого поворота судна на значительный угол. Если судно с курса сближения сразу же выходит на курс траления, это позволяет избежать порыва трала от неравномерного распределения нагрузок и обеспечивает его устойчивое движение по глубине; значительно снижается общее время сближения и траления, т. е. улучшается режим промысловой работы судна. Рассмотрим задачу определения элементов горизонтального перемещения косяка при сближении с ним по кривой погони. Введем следующие обозначения (рис. 186); точка С — место судна, точка К— положение ядра косяка, относительно судна, П — текущий пеленг на ядро косяка, Д — текущее расстояние между судном и ядром косяка, Ук — скорость горизонтального перемещения косяка, qК— угол между направлением текущего пеленга и вектором скорости косяка.
Рис. 1.8. Сближение с косяком по кривой погони В момент Т=00.00, когда по результатам решения предыдущей задачи трал вышел на продолжение ДП судна, прямо по носу (на КУ) обнаружили новый косяк на Д0= 1600 м. начато с ним сближение кривой погони. В момент Т=00,06, когда курс судна изменился на 200, 300 и 400, измерено расстояние до ядра косяка 800м. Определить с помощью таблиц курс и скорость косяка.
Vk=K*V; Kk=Kc+gK
Рассчитайте длину забега судна при условии, что постановка трала должна начинаться с расчетом перемещения косяка на курсе траления противоположном направлении движения судна. qk=Пк-Кк; sinY=(Vk/V)sin(gk)
Таблица значений К и gk для входного аргумента Д: До= 0,5
Последнее изменение этой страницы: 2019-03-20; Просмотров: 529; Нарушение авторского права страницы Главная | Случайная страница | Обратная связь | ||||||||||||||||||
 При облове локальных плотных и быстроподвижных косяков пелагических рыб (сельди, ставриды, мойвы, сардины и др.) разноглубинным тралом или кошельковым неводом судно предварительно сближается с косяком. В процессе сближения по данным гидролокационных наблюдений определяют элементы горизонтального перемещения косяка: направление (курс) и скорость. При этом предполагается, что в течение времени сближения косяк сохраняет неизменными направление и скорость горизонтального перемещения.
При облове локальных плотных и быстроподвижных косяков пелагических рыб (сельди, ставриды, мойвы, сардины и др.) разноглубинным тралом или кошельковым неводом судно предварительно сближается с косяком. В процессе сближения по данным гидролокационных наблюдений определяют элементы горизонтального перемещения косяка: направление (курс) и скорость. При этом предполагается, что в течение времени сближения косяк сохраняет неизменными направление и скорость горизонтального перемещения. . Затем на продолжении линии КоК1 откладывают в выбранном масштабе от точки K1 вектор скорости косяка VK и отмечают точку К′1, из которой раствором циркуля, равным в выбранном масштабе скорости судна V, делают засечку на линии C1K1. Полученную таким образом точку m соединяют прямой линией с точкой К′1 При помощи параллельной линейки переносят направление линии m К′1 к точке С1 и прокладывают прямую С1К2 до пересечения с продолжением линии КоК′1 в точке K2. которая является местом встречи судна с ядром косяка. Направление прямой С1К2 определяет курс сближения судна вплотную с ядром косяка Кc. Угол K1С1K2 = ψ представляет собой угол упреждения.
. Затем на продолжении линии КоК1 откладывают в выбранном масштабе от точки K1 вектор скорости косяка VK и отмечают точку К′1, из которой раствором циркуля, равным в выбранном масштабе скорости судна V, делают засечку на линии C1K1. Полученную таким образом точку m соединяют прямой линией с точкой К′1 При помощи параллельной линейки переносят направление линии m К′1 к точке С1 и прокладывают прямую С1К2 до пересечения с продолжением линии КоК′1 в точке K2. которая является местом встречи судна с ядром косяка. Направление прямой С1К2 определяет курс сближения судна вплотную с ядром косяка Кc. Угол K1С1K2 = ψ представляет собой угол упреждения. Прежде чем перейти к решению поставленной выше частной задачи методом относительной прокладки, рассмотрим кратко теоретические основы относительного движения применительно к промысловой навигации. На рисунке ХОУ — система координат, принятая условно за неподвижную; Х'О'У′ — подвижная система координат, связанная с маневрирующим судном М; К — объект маневра (ядро локального подвижного косяка рыбы) . Движение косяка по отношению к подвижной системе координат Х'О'У′ называется относительным. Движение самой системы координат Х'О'У′ по отношению к системе координат ХОУ, условно принятой за неподвижную, называется абсолютным движением.
Прежде чем перейти к решению поставленной выше частной задачи методом относительной прокладки, рассмотрим кратко теоретические основы относительного движения применительно к промысловой навигации. На рисунке ХОУ — система координат, принятая условно за неподвижную; Х'О'У′ — подвижная система координат, связанная с маневрирующим судном М; К — объект маневра (ядро локального подвижного косяка рыбы) . Движение косяка по отношению к подвижной системе координат Х'О'У′ называется относительным. Движение самой системы координат Х'О'У′ по отношению к системе координат ХОУ, условно принятой за неподвижную, называется абсолютным движением.


