
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Щодо підготовки до державного екзаменуСтр 1 из 5Следующая ⇒
ПИТАННЯ до державного екзамену з дисципліни “Теоретична механіка” 1. Сила, її момент відносно точки та осі (сила, її характеристики, проекція сили на вісь і на площину, аналітичний спосіб задавання сили; момент сили відносно точки, осі). 2. Система збіжних сил, момент рівнодійної системи збіжних сил (основні поняття, приведення системи збіжних сил до рівнодійної, умови рівноваги просторової та площинної системи збіжних сил). 3. Основні рухи абсолютно твердого тіла (завдання руху твердого тіла, поступальний рух, обертальний рух навколо нерухомої осі, швидкість і прискорення точок тіла, що обертається навколо нерухомої осі). 4. Плоскопаралельний рух твердого тіла (кінематичні рівняння руху, швидкість точок тіла при плоскопаралельному русі, план швидкостей, миттєвий центр швидкостей, поняття про центроїди, прискорення точок тіла при плоскопаралельному русі). 5. Складний рух точки (основні поняття, абсолютна та відносна похідні від вектора, теорема про складання швидкостей, теорема про складання прискорень – теорема Коріоліса, правило Жуковського). 6. Диференціальне рівняння руху матеріальної точки. Основні задачі динаміки (диференціальне рівняння руху вільної матеріальної точки, перша основна задача динаміки, друга основна задача динаміки, умови прямолінійного руху матеріальної точки).
МЕТОДИЧНІ РЕКОМЕНДАЦІЇ Щодо підготовки до державного екзамену з дисципліни “Теоретична механіка” для студентів очної форми навчання спеціальності 6.010103 “Педагогіка і методика середньої освіти. Трудове навчання” освітньо-кваліфікаційний рівень – бакалавр Плоскопаралельний рух твердого тіла (кінематичні рівняння руху, швидкість точок тіла при плоскопаралельному русі, план швидкостей, миттєвий центр швидкостей, поняття про центроїди, прискорення точок тіла при плоскопаралельному русі). Кінематичні рівняння руху Плоскопаралельним рухом твердого тіла називається такий рух, при якому плоска фігура, утворена внаслідок перерізу тіла деякою нерухомою площиною, залишається у цій площині.
тобто траєкторії, швидкості та прискорення всіх точок цієї прямої будуть однаковими. Таким чином, для визначення руху тіла необхідно знати рух лише однієї точки на кожній прямій, проведеній перпендикулярно площині Плоскопаралельний рух плоскої фігури 1. поступальним, що передбачає переміщення тіла 2. обертальним, що полягає в обертанні тіла Точка, навколо якої фігура здійснює обертання, називається полюсом (т. А). Рух плоскої фігури визначається трьома незалежними параметрами: координатами т.
План швидкостей Залежність між швидкостями точок плоскої фігури Припустимо, що відомі швидкості точок Виконана побудова називається планом швидкостей; відрізки
З З З і т. д. Відповідно, кожний відрізок, що з’єднує вершини плану швидкостей, геометрично рівний обертовій швидкості відповідної точки фігури навколо іншої точки як навколо полюса. Тому, Звідси слідує, що багатокутник Для побудови плана швидкостей точок плоскої фігури необхідно знати: – модуль і напрям швидкості однієї точки цієї фігури; – пряму, по якій напрямлена швидкість будь-якої іншої точки фігури.
Припустимо, що відомі: – модуль і напрям швидкості – пряма, по якій напрямлена швидкість Необхідно знайти 1) Проведемо з довільної 2) Відомо, що відрізки, які з’єднують вершини плану швидкостей, перпендикулярні до відрізків, які з’єднують відповідні точки фігури. 3) Щоб визначити вершину 4) Щоб визначити вершину Аналогічною побудовою можна визначити швидкість будь-якої точки плоскої фігури, з’єднавши її з двома точками, швидкості яких уже відомі. Миттєвий центр швидкостей Миттєвий центр швидкостей – точка плоскої фігури, швидкість якої в даний момент часу дорівнює нулю.
відповідно до цього перпендикуляру співпав з напрямом обертання фігури. Обертові швидкості всіх точок цього перпендикуляру навколо полюса Знайдемо таку Швидкість Відповідно, Визначимо положення
Тобто, миттєвий центр швидкостей плоскої фігури знаходиться на перпендикулярі до напряму швидкості полюса на відстані від полюса, що дорівнює Визначимо швидкості
швидкість будь-якої точки плоскої фігури в даний момент часу становить обертову швидкість цієї точки навколо миттєвого центру швидкостей. Тому, швидкість будь-якої точки плоскої фігури в кожний момент часу має модуль, що дорівнює добутку кутової швидкості фігури на довжину відрізка, який з’єднує точку з миттєвим центром швидкостей, і напрямлена перпендикулярно до цього відрізка в сторону обертання фігури. Знайдемо залежність між швидкостями точок плоскої фігури в даний момент часу:
модулі швидкостей точок плоскої фігури в кожний момент часу пропорційні відстаням від цих точок до миттєвого центру швидкостей. Поняття про центроїди При русі плоскої фігури в її площині миттєвий центр швидкостей переміщується від однієї точки фігури до іншої, займаючи кожного разу нові положення. Геометричне місце миттєвих центрів швидкостей (траєкторія), відмічених на площині, що жорстко зв’язана з плоскою фігурою, називається рухомою центроїдою. Геометричне місце миттєвих центрів швидкостей (траєкторія), відмічених на нерухомій площині, називається нерухомою центроїдою .
Сила та її характеристики Сила – векторна величина, що є мірою механічної взаємодії матеріальних тіл. Сила характеризується: 1) Числовим значенням (модулем). Модуль сили знаходять шляхом її порівняння із силою, прийнятою за одиницю. Одиниця виміру сили у Міжнародній системі одиниць (СІ) – 1 ньютон [ 1 Н ] – це сила, яка надає тілу масою 1 кг прискорення 1 м/с2 у напрямі дії сили. 9,81 Н » 1 кг. 2) Напрямом. Напрям сили – напрям руху, який дістало б тіло, що перебуває у 3) Точкою прикладання. Точкою прикладання сили називається матеріальна
Проекція сили на вісь Проекція вектора сили на вісь – це алгебраїчна (скалярна) величина, що дорівнює добутку модуля сили на косинус кута між силою і додатнім напрямом осі.
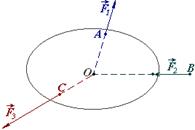
Основні поняття Система сил – сукупність кількох сил, прикладених до тіла, точки або системи точок і тіл. Плоска система сил – система сил, лінії дії яких лежать в одній площині. Збіжна система сил – система сил, лінії дії яких перетинаються в одній точці.
Якщо сили збіжної системи прикладені до різних точок тіла (рис. а), то згідно з наслідком 1 аксіоми 2 кожну силу можна перенести в т. О (рис. б).
ПИТАННЯ до державного екзамену з дисципліни “Теоретична механіка” 1. Сила, її момент відносно точки та осі (сила, її характеристики, проекція сили на вісь і на площину, аналітичний спосіб задавання сили; момент сили відносно точки, осі). 2. Система збіжних сил, момент рівнодійної системи збіжних сил (основні поняття, приведення системи збіжних сил до рівнодійної, умови рівноваги просторової та площинної системи збіжних сил). 3. Основні рухи абсолютно твердого тіла (завдання руху твердого тіла, поступальний рух, обертальний рух навколо нерухомої осі, швидкість і прискорення точок тіла, що обертається навколо нерухомої осі). 4. Плоскопаралельний рух твердого тіла (кінематичні рівняння руху, швидкість точок тіла при плоскопаралельному русі, план швидкостей, миттєвий центр швидкостей, поняття про центроїди, прискорення точок тіла при плоскопаралельному русі). 5. Складний рух точки (основні поняття, абсолютна та відносна похідні від вектора, теорема про складання швидкостей, теорема про складання прискорень – теорема Коріоліса, правило Жуковського). 6. Диференціальне рівняння руху матеріальної точки. Основні задачі динаміки (диференціальне рівняння руху вільної матеріальної точки, перша основна задача динаміки, друга основна задача динаміки, умови прямолінійного руху матеріальної точки).
МЕТОДИЧНІ РЕКОМЕНДАЦІЇ щодо підготовки до державного екзамену з дисципліни “Теоретична механіка” для студентів очної форми навчання спеціальності 6.010103 “Педагогіка і методика середньої освіти. Трудове навчання” освітньо-кваліфікаційний рівень – бакалавр Плоскопаралельний рух твердого тіла (кінематичні рівняння руху, швидкість точок тіла при плоскопаралельному русі, план швидкостей, миттєвий центр швидкостей, поняття про центроїди, прискорення точок тіла при плоскопаралельному русі). |
|||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2019-03-31; Просмотров: 248; Нарушение авторского права страницы
 .
.

 переміщуються в площинах, паралельних нерухомій площині
переміщуються в площинах, паралельних нерухомій площині  .
. . З визначення плоскопаралельного руху і властивостей твердого тіла випливає, що будь-яка пряма
. З визначення плоскопаралельного руху і властивостей твердого тіла випливає, що будь-яка пряма  , проведена в тілі перпендикулярно площині
, проведена в тілі перпендикулярно площині 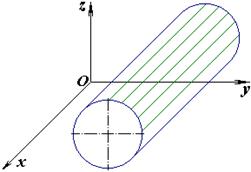
 і
і  , тобто відрізком
, тобто відрізком  ;
; у положення
у положення  .
. і кутом повороту
і кутом повороту  плоскої фігури навколо т. А:
плоскої фігури навколо т. А: – кінематичні рівняння твердого тіла, що здійснює плоскопаралельний рух.
– кінематичні рівняння твердого тіла, що здійснює плоскопаралельний рух. дає змогу визначити швидкості точок цієї фігури шляхом наочної побудови, що називається планом швидкостей.
дає змогу визначити швидкості точок цієї фігури шляхом наочної побудови, що називається планом швидкостей. плоскої фігури. Відкладемо з довільної
плоскої фігури. Відкладемо з довільної  за напрямом швидкостей даних точок відрізки
за напрямом швидкостей даних точок відрізки  , що дорівнюють швидкостям цих точок (
, що дорівнюють швидкостям цих точок (  і т.д.). З’єднаємо
і т.д.). З’єднаємо  відрізками.
відрізками. – променями;
– променями; 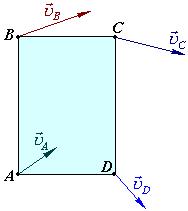

 :
: 
 :
: 
 :
: 
 і т.д.
і т.д. подібний до багатокутника
подібний до багатокутника  і повернутий відносно нього на кут
і повернутий відносно нього на кут  в сторону обертання плоскої фігури.
в сторону обертання плоскої фігури.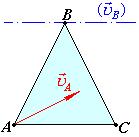

 трикутної пластини
трикутної пластини  , що рухається у площині креслення;
, що рухається у площині креслення; цієї пластини.
цієї пластини. і
і  шляхом побудови плану швидкостей.
шляхом побудови плану швидкостей. відрізок
відрізок  і пряму, паралельну
і пряму, паралельну  .
. плану швидкостей, проведемо з вершини
плану швидкостей, проведемо з вершини  пряму перпендикулярну до
пряму перпендикулярну до  .
. плану швидкостей, проведемо з вершин
плану швидкостей, проведемо з вершин  і
і  трикутника. Перетин цих прямих утворить вершину
трикутника. Перетин цих прямих утворить вершину  .
. і кутова швидкість фігури
і кутова швидкість фігури  в деякий момент часу. Вважатимемо, що
в деякий момент часу. Вважатимемо, що 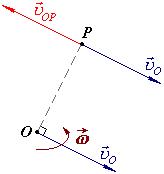
 протилежно напрямлені до швидкості полюса.
протилежно напрямлені до швидкості полюса. , обертова швидкість якої дорівнює за модулем швидкості полюса
, обертова швидкість якої дорівнює за модулем швидкості полюса  . Оскільки напрями цих швидкостей протилежні, то
. Оскільки напрями цих швидкостей протилежні, то  .
.
 навколо полюса
навколо полюса  :
:
 .
. плоскої фігури, прийнявши за полюс миттєвий центр швидкостей
плоскої фігури, прийнявши за полюс миттєвий центр швидкостей  .
. (в даний момент)
(в даний момент)  , тобто
, тобто

 , тобто
, тобто і т.д., тобто
і т.д., тобто


 вважають додатною, якщо напрями проекції та осі збігаються, або якщо кут між напрямом вектора сили і віссю
вважають додатною, якщо напрями проекції та осі збігаються, або якщо кут між напрямом вектора сили і віссю  (кут
(кут  ) – гострий.
) – гострий.


 ) – тупий.
) – тупий.



 – плоска система збіжних сил.
– плоска система збіжних сил.

 а
а
 б
б