
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Швидкість при плоскопаралельному русі
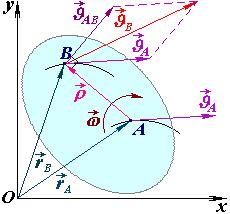
Залежність між швидкостями точок плоскої фігури визначається за теоремою: швидкість будь-якої точки плоскої фігури дорівнює геометричній сумі швидкості полюса і швидкості цієї точки при обертанні плоскої фігури навколо полюса.
Ця залежність буде зберігатися протягом усього часу руху. Оскільки радіус-вектор Продиференціюємо обидві частини рівності за часом: Похідні від векторів Оскільки під час руху плоскої фігури модуль радіус-вектора Обертова швидкість точки твердого тіла дорівнює:
де Теорему доведено. Обертова швидкість
Швидкість План швидкостей Залежність між швидкостями точок плоскої фігури Припустимо, що відомі швидкості точок Виконана побудова називається планом швидкостей; відрізки
З З З і т. д. Відповідно, кожний відрізок, що з’єднує вершини плану швидкостей, геометрично рівний обертовій швидкості відповідної точки фігури навколо іншої точки як навколо полюса. Тому, Звідси слідує, що багатокутник Для побудови плана швидкостей точок плоскої фігури необхідно знати: – модуль і напрям швидкості однієї точки цієї фігури; – пряму, по якій напрямлена швидкість будь-якої іншої точки фігури.
Припустимо, що відомі: – модуль і напрям швидкості – пряма, по якій напрямлена швидкість Необхідно знайти 1) Проведемо з довільної 2) Відомо, що відрізки, які з’єднують вершини плану швидкостей, перпендикулярні до відрізків, які з’єднують відповідні точки фігури. 3) Щоб визначити вершину 4) Щоб визначити вершину Аналогічною побудовою можна визначити швидкість будь-якої точки плоскої фігури, з’єднавши її з двома точками, швидкості яких уже відомі. |
Последнее изменение этой страницы: 2019-03-31; Просмотров: 259; Нарушение авторского права страницы
 приймемо за полюс (
приймемо за полюс (  ). Вектор
). Вектор  перпендикулярний до площини рисунка, направлений від нас.
Визначимо швидкість будь-якої іншої точки плоскої фігури, наприклад
перпендикулярний до площини рисунка, направлений від нас.
Визначимо швидкість будь-якої іншої точки плоскої фігури, наприклад  . Для цього проведемо з нерухомої
. Для цього проведемо з нерухомої  (початку нерухомої системи координат, відносно якої рухається плоска фігура) в
(початку нерухомої системи координат, відносно якої рухається плоска фігура) в  і
і  і
і  . Радіус-вектор
. Радіус-вектор  (1)
(1)
 з’єднує дві точки (
з’єднує дві точки (  .
. (2)
(2) – це обертова швидкість
– це обертова швидкість  :
:  .
. . Тоді,
. Тоді, ,
, (3)
(3) направлена перпендикулярно до відрізка
направлена перпендикулярно до відрізка  в сторону обертання фігури. Її модуль дорівнює:
в сторону обертання фігури. Її модуль дорівнює:
 дає змогу визначити швидкості точок цієї фігури шляхом наочної побудови, що називається планом швидкостей.
дає змогу визначити швидкості точок цієї фігури шляхом наочної побудови, що називається планом швидкостей. плоскої фігури. Відкладемо з довільної
плоскої фігури. Відкладемо з довільної  , що дорівнюють швидкостям цих точок (
, що дорівнюють швидкостям цих точок (  і т.д.). З’єднаємо
і т.д.). З’єднаємо  відрізками.
відрізками. – променями;
– променями; 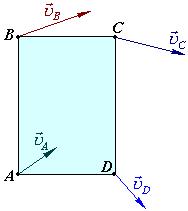

 :
: 
 :
: 
 :
: 
 і т.д.
і т.д. подібний до багатокутника
подібний до багатокутника  і повернутий відносно нього на кут
і повернутий відносно нього на кут  в сторону обертання плоскої фігури.
в сторону обертання плоскої фігури.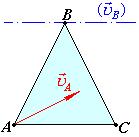

 трикутної пластини
трикутної пластини  , що рухається у площині креслення;
, що рухається у площині креслення; цієї пластини.
цієї пластини. і
і  шляхом побудови плану швидкостей.
шляхом побудови плану швидкостей. відрізок
відрізок  і пряму, паралельну
і пряму, паралельну  .
. плану швидкостей, проведемо з вершини
плану швидкостей, проведемо з вершини  пряму перпендикулярну до
пряму перпендикулярну до  .
. плану швидкостей, проведемо з вершин
плану швидкостей, проведемо з вершин  і
і  трикутника. Перетин цих прямих утворить вершину
трикутника. Перетин цих прямих утворить вершину  .
.