|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ИЗМЕРЕНИЕ ЧАСТОТЫ ВРАЩЕНИЯ
В энергетической установке судна частоту вращения вала двигателя измеряют механическими, гидравлическими, электрическими и электронными измерительными устройствами.
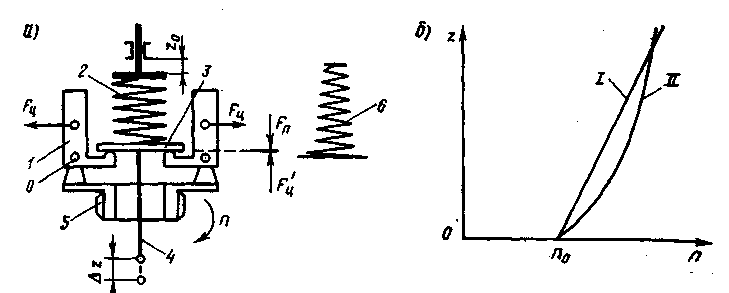
Рис 14. Принципиальная схема и статические характеристики центробежного датчика частоты вращения.
В центробежном датчике чувствительным элементом являются грузы 1 (рис. 14, а), свободно сидящие на осях О в опорах диска 5. Диск приводится во вращение через механическую передачу от вала двигателя или другого механизма. Частота вращения п пропорциональна угловой скорости ω и преобразуется грузами в центробежную силу F Ц, которая приводится к муфте сравнивающего устройства 3 со значением F 'Ц и уравновешивается силой действия цилиндрической пружины 2 задающего устройства: F 'Ц = F П . Для крайнего нижнего положения муфты и выходного штока 4 датчика при установившемся режиме зависимость примет вид
где i — число грузов датчика; a 1 — передаточный коэффициент от центра тяжести грузов к муфте; тг— масса груза; r о — радиус вращения центра тяжести груза; ω0— угловая скорость грузов при установившемся режиме, соответствующая крайнему нижнему положению муфты. Приращение угловой скорости Δω сверх ω0 вызывает нарушение равновесия действующих сил и движение муфты датчика. По мере ее перемещения Δ z увеличивается натяжение пружины и наступает статическое равновесие сил. При установившемся режиме зависимость между положением муфты датчика и частотой вращения при c = idem нелинейная и графически описывается статической характеристикой II (рис. 14, б). Кривизна статической характеристики объясняется квадратичной зависимостью перемещения муфты Δ z от приращения частоты вращения Δ n, а также изменением радиуса Δr вращения центра тяжести грузов. Статическую характеристику можно приблизить к линейной I, если в датчике цилиндрическую пружину (постоянной жесткости) 2 заменить конической (переменной жесткости) 6. Иногда для уменьшения кривизны статической характеристики цилиндрическую пружину заменяют пакетом пружин с различной жесткостью. Движущая сила датчика определяется разностью сил действия грузов и пружины. Ее можно повысить, например, путем увеличения массы грузов, однако при этом возрастает инерционность датчика и ухудшаются его динамические свойства.
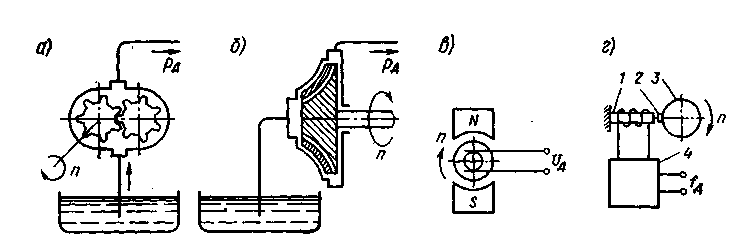
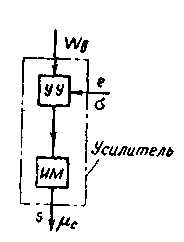
В гидравлическом датчике чувствительным элементом является насос: шестеренный (рис. 15, а) или центробежный (импеллер, рис. 15, б), навешенный на двигатель. С изменением частоты вращения вала двигателя меняются подача и давление масла на выходе из насоса, т.е. наблюдается однозначное статическое соответствие частоты вращения и давления. Это давление подается на вход датчика, выходным сигналом которого является перемещение выходного звена. Такой датчик настраивают обычно изменением предварительного натяжения пружины датчика давления. Достоинством гидравлических датчиков является малая инерционность вследствие несжимаемости жидкости и удобство компоновки. Однако они обладают нелинейной и нестабильной статической характеристикой из-за изменения вязкости масла при работе. В электрическом измерительном устройстве датчиком является тахо-генератор (рис. 15, в) представляющий собой электрическую машину малой мощности постоянного или переменного тока. При вращении ротора в постоянном магнитном поле в обмотках индуцируется пропорциональная частоте вращения э.д.с, являющаяся выходным сигналом тахогенератора. Достоинством тахогенераторов являются малые размеры и масса, возможность дистанционной передачи сигналов, что позволяет широко их использовать при автоматизации процессов. Так, в системах контроля напряжение тахогенератора измеряют вольтметром, отградуированным в оборотах в минуту, по показаниям которого определяют частоту вращения вала. Принцип действия электронного измерительного устройства основан на безынерционном действии электронного счетного устройства, работающего с индукционным или фотоэлектрическим импульсным датчиком. Индукционный датчик (рис. 15, г) состоит из жестко закрепленного магнитного сердечника 1 с катушкой индуктивности и подвижного якоря 2 (из магнитомягкого материала), закрепленного на валу 3. При вращении вала якорь (штифт), проходя мимо сердечника, создает пульсирующий магнитный поток, под действием которого в катушке индуцируется э.д.с. Импульсы э.д.с., являющиеся выходными сигналами датчика, с частотой вращения вала поступают на вход частотного преобразователя 4, выходным сигналом которого являются прямоугольные импульсы той же частоты. В системах контроля частоту импульсов э.д.с. измеряют электронным частотомером с цифровым индикатором или со шкалой, отградуированной в оборотах в минуту. Достоинством таких датчиков является бесконтактная связь с вращающимися деталями и высокая точность измерения, повысить которую можно заменой однополюсного якоря многополюсным в виде зубчатого венца. УСИЛИТЕЛЬНЫЕ ОРГАНЫ Выходной сигнал измерителя может быть использован для непосредственного воздействия на РО. Однако иногда мощность этого сигнала оказывается недостаточной и ее повышают в усилительных органах. Усилительный орган (усилитель) — это устройство (рис. 16), в котором осуществляется увеличение мощности управляющего (входного) сигнала за счет вспомогательной энергии WB постороннего источника питания. По виду вспомогательной энергии усилители делят на механические, гидравлические, пневматические, электрические и комбинированные. Структура и общий принцип действия механических, гидравлических и пневматических усилителей одинаковы. Рабочая среда, являющаяся вспомогательной энергией WB, подается к управляющему устройству (распределителю), которое по сигналу от датчика e = f (уД) управляет подводом энергии WB к исполнительному механизму. Здесь энергия рабочей среды преобразуется в механическую работу s по перемещению выходного звена. В автоматической системе регулирования это движение передается регулирующему органу, воздействующему на ОР. Совокупность УУ с ИМ образует усилитель мощности, их конструктивное исполнение зависит от вида вспомогательной энергии.
Рис. 16. Структурная схема усилительного органа.
В механическом усилителе УУ выполняют обычно в виде фрикционной муфты или рычажного реле, передающего механическую энергию сжатой пружины либо движущихся масс приводу РО. В гидравлических и пневматических усилителях управляющие устройства по принципу действия делят на струйные, золотниковые, дроссельные, компенсационные и комбинированные. ГИДРАВЛИЧЕСКИЕ УСИЛИТЕЛИ
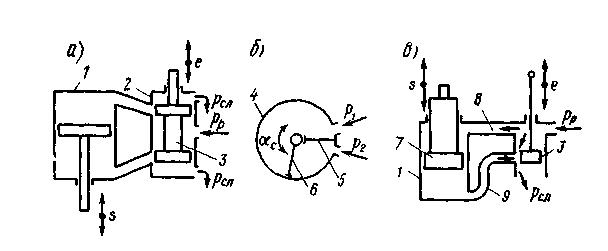
Рис. 17. Схемы действия гидравлических усилителей с отсечным золотником и поршневым ИМ.
При смещении Δ e золотника из среднего положения под воздействием датчика одна из полостей ИМ сообщается с напорной магистралью, а другая — со сливной. Под действием силы, вызванной разностью давлений масла в полостях, поршень перемещается и через шток воздействует на РО. Поршень будет перемещаться на расстояние Δ s до тех пор, пока не дойдет до крайнего положения в цилиндре либо пока золотник не вернется в среднее положение. Направление движения поршня зависит от направления смещения золотника. Зависимость между входным параметром Δе усилителя и выходным Δ s может быть получена из условия неразрывности потока масла, поступающего в полость ИМ. Так, за время Δ t объем масла, поступающего через напорное окно УУ, равен объему, в котором переместился поршень за тот же промежуток времени: f З v Δt = f П Δs , где f З — площадь открытого золотником проходного сечения окна; v — скорость потока масла в окне; f П — активная площадь поршня ИМ; Δs — перемещение поршня за время Δ t. Эта зависимость справедлива, если пренебречь силами сопротивления движению поршня, сжимаемостью и протечками масла, инерцией движущихся масс ИМ. При прямоугольном сечении окон шириной b площадь f З проходного сечения пропорциональна смещению Δе золотника: f З = Δе b. В гидравлическом усилителе с отсечным золотником и дифференциальным поршневым исполнительным механизмом (рис. 17, в) активная площадь нижнего основания поршня 7 исполнительного механизма 1 значительно больше площади верхнего (кольцевого) основания. Верхняя полость неуправляема, и в нее по каналу 8 непрерывно поступает масло под давлением рР из напорной магистрали. При среднем положении золотник 3 своим полем закрывает канал 9, ведущий в нижнюю полость ИМ, и поршень неподвижен. Смещение Δе золотника вверх под действием датчика приводит к сообщению нижней полости ИМ через канал 9 со сливом. От давления масла на верхнюю кольцевую поверхность поршень перемещается вниз. При смещении золотника вниз обе полости ИМ соединяются с напорной магистралью, что приводит к движению поршня под действием разности сил вверх. Движение поршня прекращается при установке управляющего золотника в среднее положение. В рассмотренных усилителях золотниковые УУ просты по конструкции и обладают большой пропускной способностью рабочей среды, что позволяет получить высокую скорость движения поршня ИМ. При автоматизации паровых СЭУ широко применяют гидравлические усилители со струйными УУ. В корпусе управляющего устройства типа струйного реле 4 (рис. 18, а) установлены напорное сопло 1, качающаяся струйная трубка (сопло) 3 и два приемных сопла (диффузора) 5, которые трубопроводами сообщаются с полостями поршневого исполнительного механизма 6 двустороннего действия. Вода (реже масло) под давлением рр = (4÷8)105 Па подводится через напорное сопло в диффузор струйной трубки 3, закрепленной на оси 2. Ось совершает качательные движения по сигналу от датчика. При выходе из сужающейся трубки 3 потенциальная энергия давления жидкости преобразуется в кинетическую, а в расширяющихся соплах 5 кинетическая энергия вновь превращается в потенциальную. Среднему положению II трубки относительно приемных окон соответствует одинаковое давление в выходных соплах 5 (p 1 = р2) и полостях ИМ. Поршень при этом неподвижен. Смещение сопла 3 из среднего положения в положение I или III приводит к совмещению его с одним из сопел 5, вследствие чего растет давление в одной полости ИМ и падает в другой. Под действием разности давлении поршень перемещается либо до крайнего положения, либо до тех пор, пока сопло 3 не вернется в среднее положение. Жидкость, не попавшая в напорный трубопровод и вытесняемая поршнем при его движении, идет на слив под давлением рСЛ через патрубок в корпусе струйного реле. Выходным параметром усилителя является перемещение s штока ИМ. В струйном двухпоточном усилителе (рис. 18, б) напорные сопла 1, идущие от подводящего штуцера 7, и приемные сопла 5 закреплены неподвижно попарно друг против друга, а подводом жидкости к исполнительному механизму 6 управляет подвижная качающаяся заслонка 8, связанная с датчиком через вал 2. При среднем положении II заслонки давление в приемных соплах 5, а следовательно, и полостях ИМ одинаково (р1 = р2). Отклонение заслонки от среднего положения в положение I или III приводит к разности давлений в полостях, вызывая перемещение поршня. Жидкость из полости с меньшим давлением идет на слив через диффузор и сливное отверстие в корпусе УУ. Поршень перемещается до тех пор, пока заслонка струйного реле не встанет в среднее положение.
Рис. 18. Схемы действия струйных гидравлических усилителей. При среднем положении II заслонки давление в приемных соплах 5, а следовательно, и полостях ИМ одинаково (р1 = р2). Отклонение заслонки от среднего положения в положение I или III приводит к разности давлений в полостях, вызывая перемещение поршня. Жидкость из полости с меньшим давлением идет на слив через диффузор и сливное отверстие в корпусе УУ. Поршень перемещается до тех пор, пока заслонка струйного реле не встанет в среднее положение. Возвратно-поступательное движение поршня преобразуется кривошипно-шатунным механизмом в угол разворота αС выходного вала и зубчатого сектора 9, передающего воздействие на РО. Рассмотренные усилители являются астатическими, так как любое значение входного параметра Δe ¹ 0 вызывает изменение выходного параметра до максимального значения ΔSmax с постоянной скоростью. Движение выходного звена таких усилителей может быть ограничено при любом его промежуточном положении установкой УУ в среднее положение, т. е. при Δe=0. Для этого необходимо соответствующее воздействие датчика либо введение в усилитель отрицательной жесткой обратной связи, сущность которой состоит в действии на управляющее устройство ИМ противоположно действию измерителя.
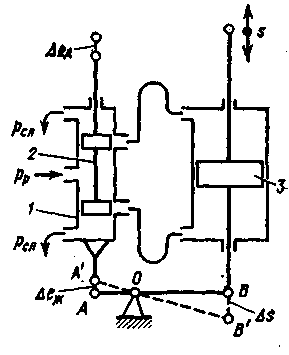
Рис. 19. Схема действия гидравлического усилителя с ЖОС
Гидравлический усилитель с ЖОС (рис. 19) отличается от усилителя, показанного на рис. 14. а, тем, что через рычаг жесткой обратной связи АОВ передается обратное кинематическое воздействие от поршня 3 исполнительного механизма на подвижную втулку 1 золотника 2. Если при некотором воздействии измерителя золотник смещается относительно втулки из среднего положения вверх на расстояние ΔeД, то верхняя полость исполнительного механизма сообщается с напорной магистралью, а нижняя — со сливной. Сила, вызванная разностью давлений рР — рСЛ, движет поршень вниз. Он разворачивает рычаг АОВ относительно опоры О в положение А'ОВ' и смещает золотниковую втулку вверх на расстояние ΔeЖ, перекрывая золотником окна, идущие к исполнительному механизму. Движение поршня прекращается в момент установки втулки и золотника в среднее положение вследствие действия ЖОС. Такая обратная связь, принцип действия которой основан на компенсации (выравнивании) перемещений, является кинематической. Таким образом, под действием кинематической следящей ЖОС ограничивается движение поршня ИМ и новому значению ΔeД входного параметра усилителя соответствует новое значение Δ s выходного параметра. Зависимость между этими величинами можно получить из условий движения золотника относительно втулки под действием датчика ΔeД (поршень ИМ неподвижен) и втулки относительно золотника под действием жесткой обратной связи ΔeЖ (золотник неподвижен). Таким образом, введение в усилитель отрицательной ЖОС позволило обеспечить жесткую связь между входным и выходным параметрами, а соотношение между ними регулируют обычно изменением коэффициента kЖ. Подобными свойствами обладают усилители с УУ типа дросселей переменного сечения и ИМ одностороннего действия.
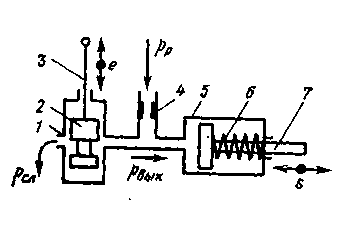
Рис. 20. Схема действия гидравлического усилителя с дросселем переменного сечения. В гидравлический усилитель одностороннего действия (рис. 20) масло под давлением рР (3 ÷ 4) 105 Па поступает через дроссель 4 постоянного сечения, ограничивающий его максимальный расход. Затем масло идет на слив через дроссель переменного сечения в виде втулки 1 и проточного золотника 2, перемещаемого датчиком через шток 3. Два последовательно соединенных дросселя образуют делитель давления рР — рСЛ, выходным сигналом которого является давление рВЫХ, поступающее в рабочую полость исполнительного механизма 5. При смещении золотника вниз уменьшается сечение сливных окон втулки и растет давление рВЫХ. Увеличивается давление масла на поршень ИМ площадью f П. Преодолевая действие силовой пружины 6 с жесткостью с и предварительным натяжением z 0, поршень начинает движение при увеличении давления на выходе до давления страгивания. На заданное давление страгивания ИМ настраивают изменением значения z 0. Минимальное давление рВЫХ выхода рабочей среды должно быть несколько ниже р0, а устанавливают его подбором проходного сечения дросселя 4 при полностью открытых окнах золотниковой втулки 1. Дальнейшее смещение Δe золотника вниз вызывает повышение давления рВЫХ, большее р0 на значение Δр, и пропорциональное перемещение Δ s выходного штока 7 ИМ, т.е усилитель является статическим. Движение золотника в обратном направлении вызывает понижение давления рВЫХ и противоположное движение поршня под действием силовой пружины. Разность сил, действующих на поршень со стороны давления рабочей среды и силовой пружины, определяет значение движущей силы ИМ на выходном штоке. Исполнительный механизм, в котором движение выходного звена в одну сторону происходит под действием рабочей среды, а в противоположную —под действием силовой пружины, называется ИМ одностороннего действия. Недостатком таких механизмов является снижение движущей силы при понижении давления рВЫХ в рабочей полости.
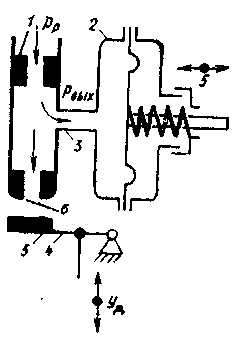
ПНЕВМАТИЧЕСКИЕ УСИЛИТЕЛИ Среди пневматических усилителей широко распространены распределители типа сопло-заслонка (рис. 21), работающие по принципу дросселирования. Управляющее устройство усилителя состоит из дросселя 1 постоянного сечения, к которому подводится рабочий воздух с постоянным давлением рР, и дросселя переменного сечения в виде сопла 6 инжекционного типа с заслонкой 5, движимой измерителем через рычаг 4. Последовательно соединенные дроссели образуют делитель давления воздуха. Выходное давление рВЫХ в трубопроводе 3 и в полости исполнительного механизма 2 зависит от зазора между заслонкой 5 и соплом 6, через которое воздух стравливается в атмосферу (с уменьшением зазора давление растет, а с увеличением — уменьшается).
Рис. 21. Схема действия пневматического усилителя с соплом-заслонкой
Изменение давления в рабочей полости мембранного ИМ одностороннего действия приводит к пропорциональному перемещению его выходного штока. Усилители с дроссельным УУ являются статическими. В динамике для них характерна максимальная скорость перемещения выходного звена в момент смещения управляющего золотника (заслонки) с последующим уменьшением ее до нуля. Рассмотренные гидравлические и пневматические усилители просты по конструкции, однако необходима специальная очистка рабочей среды, которая постоянно расходуется как при установившихся, так и при переходных режимах, что требует дополнительных затрат энергии на работу компрессоров и насосов. Безрасходные дроссельные усилители характеризуются расходом воздуха только в переходных режимах, а при установившихся расход воздуха практически отсутствует.
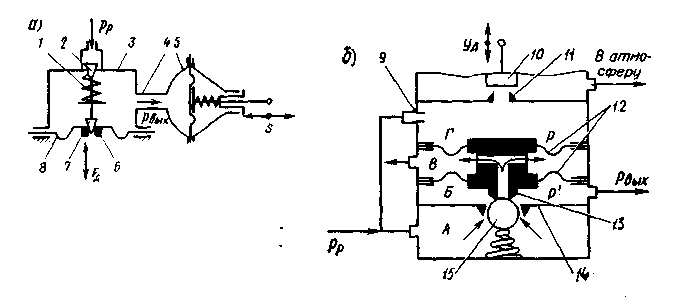
Рис. 22. Схемы действия пневматических безрасходных усилителей Пневматический безрасходный компенсационный усилитель (рис. 22, а) представляет собой камеру 3, в которой расположен шток с клапанами. Верхний клапан 2 прижимается пружиной 1 к неподвижному седлу штуцера, к которому подводится сжатый воздух постоянного давления pP. На нижний клапан 7 опирается подвижное седло 6, закрепленное на эластичной мембране 8. Полость камеры 3 соединяется трубопроводом 4 с мембранным ИМ 5 одностороннего действия. Работа усилителя основана на принципе компенсации (уравновешивания) усилий. Входным параметром является усилие F Д, действующее от датчика на седло мембраны. При установившемся режиме оба клапане закрыты, величина выходного сигнала рВЫХ усилителя пропорциональна силе F Д, т.е. усилие, развиваемое датчиком, уравновешивается давлением рВЫХ, действующим на активную площадь fa мембраны: F Д = рВЫХfa . При увеличении усилия F Д шток вместе с седлом 6 смещается вверх, открывая через клапан 2 доступ рабочему воздуху в камеру. С увеличением давления рВЫХ внутри камеры возрастает усилие, действующее на мембрану 8, прогибая ее вниз. Когда усилия будут равны, шток займет среднее положение и дальнейший рост давления рВЫХ прекратится. При уменьшении усилия F Д мембрана под действием давления воздуха прогибается вниз, образуя между клапаном 7 и седлом 6 зазор, через который воздух из полости ИМ стравливается в атмосферу. Давление воздуха рВЫХ в камере понижается и разность сил, действующих на мембрану, уменьшается. Под действием силы F Д мембрана прогибается вверх и стравливание воздуха в атмосферу через клапан 7 прекращается. Рассмотренный безрасходный усилитель является статическим, так как наблюдается однозначное соответствие между силой F Д, давлением рВЫХ воздуха и положением s штока ИМ. В тех случаях, когда усилители должны обладать высоким быстродействием при большой выходной мощности, применяют двухкаскадные усилители с дроссельным УУ в первом каскаде и компенсационным — во втором. Пневматический безрасходный двухкаскадный усилитель с дроссельным делителем давления в первом каскаде и шариковым УУ во втором (рис. 22, б) широко распространен в пневматических системах регулирования и управления. Входным параметром усилителя является положение yД заслонки 10 относительно сопла 11, которое однозначно определяет давление р воздуха, поступающего через дроссель 9 в междроссельную камеру Г. Управляющее устройство второго каскада состоит из трех раздельных камер А Б, В. Рабочий воздух под давлением рР =1,4·105 Па подводится в камеру А, которая через шариковый клапан 15 сообщается с камерой Б. В камере Б формируется выходной сигнал рВЫХ, идущий к мембранному ИМ одностороннего действия (на схеме не показан). Камера В постоянно сообщена с атмосферой и образована двумя мембранами 12 одинаковой активной площади с общим жестким центром, отделяющим камеру Б от камеры Г При установившемся режиме давление в камерах Б и Г равно, т.е. р = р' = рВЫХ . Силы, действующие на жесткий центр со стороны первого и второго каскадов усиления, уравновешены и шариковый клапан находится в закрытом состоянии. По сигналу yД датчика меняется положение заслонки 10, что приводит к изменению давления в камере Г и нарушению равновесия сил жесткого центра, вызывающих его движение. При уменьшении давления в камере Г (заслонка 10 сместилась вверх, в результате чего р < р') жесткий центр движется вверх и его штуцер 13 отходит от шарика 15, который прижат к седлу диафрагмы 14 пружиной. Через отверстие в штуцере и камеру В воздух из камеры Б и полости ИМ выходит в атмосферу, выравниваются силы, действующие на жесткий центр, и он возвращается в исходное положение. При выравнивании давлений р и р' в камерах Б и Г наступает равновесие сил и сопло прижимается к шарику, а новому положению заслонки соответствует новое выходное давление рВЫХ = р' = р. Смещение заслонки вниз вызывает пропорциональный рост давления в камере Г, движение вниз шарика под действием силы жесткого центра и рост давления рВЫХ до нового значения р. Таким образом, в динамике давление в камере Б изменяется до тех пор, пока не сравняется с давлением в камере Г, а в статике каждому положению yД заслонки соответствует вполне определенное значение выходного давления рВЫХ. При установившихся режимах рассмотренный статический усилитель обладает незначительным расходом воздуха в атмосферу вследствие малого сечения дросселя 9 первого каскада и нулевым расходом через шариковый клапан второго каскада, что приводит к значительной экономии воздуха. В динамике обеспечиваются достаточно высокая мощность и быстродействие усилителя вследствие большого проходного сечения шарикового клапана второго каскада.
|
Последнее изменение этой страницы: 2019-03-31; Просмотров: 265; Нарушение авторского права страницы