
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Классические законы регулирования.
Закон регулирования - это уравнение (математическая модель), по которому в зависимости от изменения входной величины регулятора (т.е. выходного параметра объекта регулирования, например, температуры) рассчитывается воздействие регулятора на регулирующий орган, т.е. положение заслонки крана в пределах его хода. Это правильное положение обеспечивает равновесие между подачей вещества или энергии в объект и расходом вещества или энергии. Закон регулирования определяет с какой скоростью будет перемещаться задвижка регулирующего органа и какое положение займет, когда переходный процесс будет завершен, в зависимости от величины отклонения регулируемого параметра (температуры в газовой печи или уровня воды в водонапорной башне) от заданного значения, скорости этого отклонения, а также ускорения. До появления микропроцессорной техники регуляторы непрерывного действия представляли собой механические устройства, часто прямого действия. Их проектирование могло происходить интуитивно, а настройка - опытным путем. Современные универсальные микропроцессорные регуляторы вообще не могут работать без законов регулирования. Классические законы непрерывного регулирования являются линейными и являются различными комбинациями трех составляющих: пропорциональной (П), интегральной (И) и дифференциальной (Д). S ( t ) = Ke ( t ) - пропрциональная составляющая;
где S(t) - выходная величина регулятора (например, угол поворота затвора крана или положение плунжера клапана). е = Х0 -Х- отклонение входной величины от заданного значения К0, Кi, Кр и Kd - коэффициенты передачи, которые называют параметрами настройки регулятора, t - время. В динамическом отношении указанные составляющие представляют собой соответственно пропорциональное, идеальное интегрирующее и идеальное дифференцирующее звенья, которые были обсуждены выше. Различные комбинации
где Кр, Кi, и Kd - пропорциональный коэффициент, интегральный коэффициент, дифференциальный коэффициент
ПИД- регулятор относится к наиболее распространённому типу регуляторов. Порядка 90-95% регуляторов, находящихся в настоящее время в эксплуатации, используют ПИД-алгоритм. Причинами высокой популярности являются простота построения и промышленного использования, ясность функционирования, пригодность для решения большинства практических задач и низкая стоимость. Контроллеры с обратной связью охватывают 85% всех приложений. контроллеры с прямой связью - 6%. и контроллеры, соединённые каскадно. - 9%. После появления дешёвых микропроцессоров и аналого-цифровых преобразователей в промышленных ПИД- регуляторах используются автоматическая настройка параметров, адаптивные алгоритмы, нейронные сети, генетические алгоритмы, методы нечёткой логики. Появились регуляторы с двумя степенями свободы, с применением принципов разомкнутого управления в сочетании с обратной связью, со встроенной моделью процесса. Кроме функции регулирования. в ПИД- контроллер были введены функции аварийной сигнализации, контроля разрыва контура регулирования, выхода за границы динамического диапазона и др. Практические реализации ПИД- контроллеров не всегда содержат антиалиасные фильтры, чрезмерный шум и внешние возмущения затрудняют настройку параметров. Проблемы усложняются тем. что в современных системах управления динамика часто неизвестна, регулируемые процессы нельзя считать независимыми, измерения сильно зашумтены. нагрузка непостоянна, технологические процессы непрерывны. Первый тип - клапан/заслонка с регулируемым положением и переменной скоростью перемещения запорного органа, управляемым выходным унифицированным сигналом регулятора по току (0...5/0...20/4...20 мА) или по напряжению (0 - 10В). Это значит, что регулятор на основе закона регулирования определяет положение запорного органа между закрытым и открытым положением, и скорость его перемещения в заданную позицию. При этом нет необходимости отдавать устройству команду реверсирования - движение запорного органа в любом направлении к заданному положению определяется значением тока или напряжения в цепи управления таким исполнительным механизмом, а скорость перемещения запорного органа в нужную точку определяется скоростью нарастания или Второй тип - клапан/заслонка с регулируемым положением и постоянной скоростью перемещения запорного органа. Управление ее положением осуществляется при этом при помощи двух реле универсального измерителя-регулятора (либо в нашем примере поплавка с двумя контактными группами), обеспечивающих переключение между закрыванием (завинчиванием) запорного органа и открыванием (отвинчиванием) запорного органа (пример - кран с электроприводом, состоящим из редуктора и приводного электродвигателя).
22. Работа механического пропорционального регулятора. На рисунке ниже показана замкнутая система автоматического регулирования (САР) уровня воды в баке. САР состоит из объекта регулирования - бака с водой, и регулятора - поплавкового регулятора прямого действия. Поплавковый регулятор состоит из следующих деталей: · чувствительного элемента - поплавка; · задающего устройства - стяжного механизма; · управляющего устройства - рычага; регулирующего органа - регулирующего вентиля на подающем трубопроводе. В регуляторах прямого действия регулирующий орган перемещается с помощью энергии, получаемой непосредственно от объекта регулирования. На рисунке, вентиль B закрыт, уровень воды в баке находится у заданного значения Х0. Вентиль A настраивается с помощью стяжного устройства таким образом, чтобы в бак не поступала вода и рассматриваемое состояние САР считается исходным. На следующем рисунке показана структурная схема САР. В САР с поплавковым регулятором обратная связь (ОС) действует как в переходные периоды, так и в установившихся режимах. Такая ОС называется жесткой обратной связью (является главной обратной связью в данной САР). Вода из бака выливается, уровень воды в баке понижается и поплавок регулятора, перемещаясь вниз, посредством рычага открывает клапан регулирующего вентиля A. В бак вливается вода Y, - входное регулирующее воздействие. В рассматриваемом регуляторе каждому положению поплавка в баке соответствует определенная величина потока вливающейся воды. Регулятор "не знает" величину потока Z и открывает регулирующий вентиль до тех пор, пока перемещается поплавок. Как только поток Y выходит на величину потока Z, понижение уровня воды прекращается и вместе с ним перемещение поплавка. Процесс регулирования (переходный процесс) завершается и в САР устанавливается равновесное состояние. На рисунке изображены графики переходного процесса без перерегулирования (апериодического). Изменим величину потока Z вновь. Равновесное состояние в САР нарушится и регулировочный цикл повторится. Регулятор с рассмотренным принципом действия называется пропорциональным. В пропорциональном регуляторе, работа регулятора сводится к перемещению клапана регулирующего органа А пропорционально величине ошибки е, где ошибка, это отклонение регулируемой величины от заданного значения X0. Скорость перемещения клапана также изменяется в зависимости от скорости изменения уровня. Представленный объект регулирования обладает свойством самовыравнивания. Принимается, что величина потока Z задается в начале переходного процесса и в дальнейшем не меняется. Величина ошибки зависит от коэффициента передачи (усиления) регулятора Kp. В нашем регуляторе Kp зависит от соотношения между плечами рычага m и n. Уменьшим длину плеча рычага m. Коэффициент передачи регулятора Kp возрастет и поток вливающейся воды Y выйдет на величину потока Z при меньшем значении ошибки e. С увеличением Kp уменьшается зона пропорциональности регулятора PB (The Proportional Band). Например, если регулирующий вентиль полностью открыт, когда поплавок опустился вниз на максимально возможное расстояние для данного регулятора, - PB регулятора равно 100%, а Kp равен 1. Eсли отклонение поплавка на одну пятую от этого расстояния полностью открывает клапан регулирующего вентиля - PB регулятора равно 20%, а Kp равен 5. Т.е. можно построить регулятор, в котором незначительные отклонения поплавка вызывают значительные управляющие воздействия. С уменьшением PB все более проявляется инерционность регулятора и объекта регулирования, что выражается в виде эффекта перерегулирования. САР теряет устойчивость. Сравним поведение регулятора с автомобилем, который должен разогнаться до определенной скорости и затем затормозить, чтобы остановиться у обозначенной отметки. Если постепенно уменьшать расстояние, которое отводится для выполнения этого задания, мы выйдем на пороговое расстояние, после которого автомобиль по инерции начнет переезжать отметку. Потребуется сдавать автомобиль назад, чтобы остановиться в нужном месте. В случае с регулятором, в результате возмущающего воздействия поплавок регулятора переместится вниз, по инерции опустится ниже отметки уровня для нового равновесного состояния в САР и вызовет поток вливающейся воды Y, который больше потока выливающейся воды Z. Направление перемещения поплавка изменится. Поплавок регулятора поднимется вверх и вновь пересечет отметку уровня для равновесного состояния САР, затем опустится вниз и т.д. Несмотря на это, если колебания носят быстро затухающий характер (в САР с П-регулятором с оптимальной зоной пропорциональности), процесс регулирования завершится быстрее и при меньшем значении ошибки, чем в САР с П-регулятором с широкой зоной пропорциональности. На рисунке ниже - t1 меньше t2 и e1 меньше e2. Продолжая уменьшать PB, выйдем на пороговое значение, после которого П-регулятор срывается в режим автоколебаний - узкая зона пропорциональности. Это, казалось бы, неприятное свойство нашло практическое применение при определении параметров настройки автоматических регуляторов. Главным недостатком пропорциональных регуляторов является неизбежное отклонение регулируемой величины от заданного значения.
23.Пропорциональный закон регулирования: определение, математический вид, основы работы, преимущества и недостатки, влияние коэффициента усиления на графики переходного процесса. Плунжер крана А перемещается со скоростью, пропорциональной скорости изменения ошибки рассогласования е, т.е. с чем большей скоростью нарастает изменение уровня воды относительно отметки в 10 м, тем с большей скоростью перемещается плунжер клапана на расстояние пропорционально величине ошибки е, где ошибка, это отклонение регулируемой величины от заданного значения X0. Естественно, что перемещение плунжера клапана ведет к изменению расхода жидкости на входе. Математически это можно записать в виде уравнения:
где S – положение плунжера клапана в пределах его хода в мм, Для того, чтобы наглядно представить себе процесс перемещения задвижки воспользуемся первой формулой и примером с водонапорной башней с начальными условиями, оговоренными выше по тексту. Расход уменьшился. Поскольку замер уровня происходит с частотой 2 раза в секунду, то изменение уровня регулятор обнаружил через 0,5 сек. t = 0 сек.: Х0 = 10 м , t = 0,5 сек.: Х0 = 10,05 м, e = 0,05м, Полученные данные регулятор использует для определения скорости перемещения и положения плунжера клапана в пределах его свободного хода. Коэффициент Kр задается при этом пользователем при настройке регулятора. Регулятор формирует токовый сигнал управления или сигнал управления по напряжению, который передается на микропроцессорное устройство управления частотой вращения двигателя исполнительного механизма. В результате плунжер начнет опускаться к седлу клапана, уменьшая приход воды в башню. При этом Практически это означает, что уровень воды в башне будет подниматься все медленнее и медленнее (система каждые 0,5 секунды замеряет значение уровня воды, производит расчет скорости рассогласования Теперь подробнее остановимся на графиках переходного процесса пропорционального регулятора при регулировании сравнительно медленных тепловых процессов и выясним, как влияет на них настроечный коэффициент Kр. Регулятор рассчитывает S – положение плунжера клапана в пределах его хода в мм. Практически же реальный цифровой регулятор передает исполнительному механизму информацию в виде аналогового сигнала. Выходным сигналом регулятора может быть напряжение в определенном диапазоне (например, постоянное напряжение в диапазоне от 0 до 10 В, ток 0–20 мА и т.д.). Исполнительный механизм понимает этот сигнал: так 0 В на выходе регулятора – плунжер клапана полностью перекрывает поток газа к горелкам газовой печи, 10 В на выходе регулятора – плунжер клапана полностью поднят над седлом, обеспечивая максимальную подачу. Диапазон изменения выходного сигнала называется диапазоном регулирования. Диапазон изменения сигнала ошибки называют пропорциональным диапазоном (зона пропорциональности). В П-регуляторах имеется возможность изменять диапазон регулирования и пропорциональный диапазон. Из графика видно, что чем меньше пропорциональный диапазон, тем круче характеристика регулирования. Кривая 1 соответствует диапазону изменения температуры 0–10 °С, а кривая (2) – диапазону 0–4°С. Коэффициент регулирования можно представить тогда, как Kр = ΔU/ε. В первом случае Kр = 1, а во втором Kр = 2,5. С ростом пропорционального коэффициента точность во всём диапазоне растет, однако при дальнейшем увеличении Kр возникают периодические колебания (система теряет устойчивость).
На рисунке приведены результаты математического моделирования влияния коэффициента пропорциональности на работу пропорционального регулятора при нанесении системе регулирования единичного ступенчатого воздействия в виде, например резкого одномоментного изменения расхода Z воды в башне в момент времени 1 сек.
24. Интегральный закон регулирования: определение, математический вид, основы работы, преимущества и недостатки, влияние коэффициента усиления на графики переходного процесса. Плунжер клапана А перемещается со скоростью Можно сказать, что плунжер клапана А перемещается в пределах своего хода пропорционально накопленной суммарной ошибке е за период времени от 0 до t. Математически это выглядит так: В динамическом отношении И - регулятор представляет идеальное интегрирующее звено. K i – коэффициент передачи регулятора, характеризующий скорость перемещения исполнительного механизма при отклонении входной величины (задается вручную или автоматически при настройке регулятора под конкретный техпроцесс). Из приведенного равенства В литературе и инструкциях по эксплуатации регуляторов обычно приводится параметр S – положение плунжера клапана над его седлом в пределах его хода и выражение Регулятор остановит привод плунжера клапана в момент, когда e станет равным 0. Но этого не достаточно, так как необходимо к моменту остановки привода также вернуть потерянный ранее объем V1 вытекшей жидкости, а так же выровнять текущий мгновенный расход и приход жидкости в систему. При помощи интегрирования мгновенного расхода и прихода воды можно оперативно расcчитывать разность между обьёмами V1 и V2 уходящей и прибывающей жидкости, так как V1 – интеграл по мгновенному расходу, а V2 – интеграл по мгновенному приходу и находятся они элементарным суммированием. Задача же поддержания уровня сводится тогда к тому, чтобы держать разность между V1 и V2 равной нулю. Рассмотрим вычислительный процесс, который согласно уравнений При небольших максимальных скоростях привода плунжера клапана либо небольших коэффициентах Ki интегрального регулятора на объектах с самовыравниванием возможен апериодически сходящийся переходный процесс изменения X. Переходный процесс на рисунке отличается от приведенного выше апериодически сходящегося графика ручного регулирования уровня воды наличием сходящегося колебательного процесса, постепенно затухающего до полного устранения ошибки регулирования. Положительной особенностью регулятора является регулирование без остаточного отклонения регулируемой величины. Однако И - регулятор дает медленно затухающие переходные процессы (относительно невысокую скорость регулирования) и поэтому может устанавливаться на относительно простых статических объектах с самовыравниванием. И - регуляторы не могут применяться на объектах, не обладающих самовыравниванием, так как система, состоящая из объекта без самовыравнивания и И - регулятора, неустойчива (самовыравнивание приводит к естественному уменьшению амплитуды колебаний регулируемой величины с течением времени). Поэтому самостоятельно И – закон регулирования применяется редко, а используется он в комплекте с П - законом регулирования. На рисунке приведены результаты математического моделирования влияния коэффициента Ki интегрального регулятора при нанесении системе регулирования единичного ступенчатого воздействия в виде, например, резкого одномоментного изменения расхода Z воды в башне в момент времени 1 сек.
Положительной особенностью регулятора является регулирование без остаточного отклонения регулируемой величины. Однако И - регулятор дает медленно затухающие переходные процессы (относительно невысокую скорость регулирования) и поэтому может устанавливаться на относительно простых статических объектах с самовыравниванием. И - регуляторы не могут применяться на объектах, не обладающих самовыравниванием, так как система, состоящая из объекта без самовыравнивания и И - регулятора, неустойчива (самовыравнивание приводит к естественному уменьшению амплитуды колебаний регулируемой величины с течением времени). Поэтому самостоятельно И – закон регулирования применяется редко, а используется он в комплекте с П - законом регулирования. 25.Пропорционально-интегрально-дифференциальный закон регулирования: определение, математический вид, работа составляющих закона, характерные варианты графиков переходного процесса. Возмущения в объекте регулирования носят скачкообразный резкий характер, для того, чтобы поддерживать значение температуры, давления или уровня используется ПИД – закон регулирования (изодромные с первой производной или изодромные с предварением регуляторы). Пропорционально-интегрально-дифференциальные (ПИД) регуляторы применяют в случае более жестких требований к процессу регулирования или при более сложных объектах. Для анализа работы дифференциальной составляющей удобнее пользоваться зависимостью скорости перемещения плунжера клапана При использовании дифференциальной составляющей в составе ПИД регулятора регулирующий орган приводится в действие со скоростью Математически это выглядит так: Действие первых двух составляющих было рассмотрено выше. Третья составляющая оказывается выгодной при скачкообразных изменениях регулируемого параметра. При этом в момент возникновения возмущения отклонение регулируемого параметра и скорость его изменения еще очень малы, но зато имеется ускорение изменения регулируемого параметра, которое можно зафиксировать при достаточно высокой частоте измерений значения регулируемого параметра Следствием этого является упреждающее значительное перемещение регулируемого органа в начальный период с более высокой скоростью, что предотвращает дальнейшее нарастание e и значительно улучшает процесс регулирования. Действие дифференциальной составляющей после этого снижается из-за уменьшения ускорения. За счет дифференциальной составляющей закона в первые моменты времени, пока ускорение велико, плунжер клапана начинает перемещаться значительно быстрее, а, соответственно, за эти же две секунды, проходит большее расстояние в сторону закрывания или открывания по сравнению с использованием только пропорциональной составляющей. У ПИД регулятора три настройки – коэффициент передачи пропорциональной, интегральной и дифференциальной составляющей. В динамическом отношении ПИД-регуляторы представляют собой систему из трех параллельно включенных звеньев: безынерционного, интегрирующего и дифференцирующего. ПИД – регуляторы, как и ПД-регуляторы называют регуляторами с предварением, так как они реагируют не только на отклонение регулируемой величины от заданного значения, но и на тенденцию ее изменения. ПИД-регуляторы обеспечивают достаточно высокое качество регулирования объектов, имеющих большую инертность и не допускающих остаточного отклонения регулируемой величины.
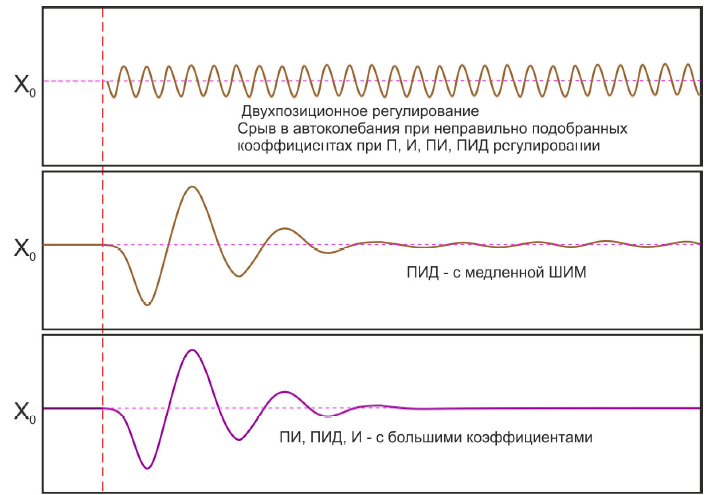
26. Расшифровка характерных графиков переходных процессов, возникающих при работе регуляторов непрерывного и дискретного действия. На рисунке ниже приведены характерные графики переходных процессов при нанесении единичного ступенчатого возмущения САР. Точные значения перерегулирования, статической ошибки, времени переходного процесса, времени разгона зависят от конкретных значений соответствующих коэффициентов настройки, поэтому на рисунке показаны лишь характерные формы кривых, соответствующих разным законам регулирования. На первом графике приведен незатухающий колебательный процесс (автоколебания), который происходит в случае использования двухпозиционного регулирования, либо при неправильно подобранных коэффициентах ПИ, П, И, ПИД законов регулирования. На втором графике приведена характерная форма графика переходного процесса, полученного на практической работе при исследовании электрической нагревательной печи СНОЛ, оборудованной ПИД - регулятором с широтно-импульсной модуляцией. Поскольку дозирование энергии, подаваемой на нагреватели печи, происходит импульсами различной длительности сравнительно не часто (длительные периоды отключения), температура в печи после окончания переходного процесса продолжает колебаться около заданной температуры (в нашем случае была задана температура 200°С, амплитуда результирующих колебаний ±1°С). Третья кривая позволяет точно выдерживать заданное значение параметра из-за наличия в составе регулятора И – составляющей. Конкретные параметры качества регулирования зависят от настроек. Четвертая кривая соответствует пропорциональному регулятору с оптимальной зоной пропорциональности или ПД – регулятору. Отсутствие интегральной составляющей не позволяет точно выдерживать значение регулируемой величины. Понятно, что у ПД – регулятора ошибка будет меньшей из-за действия дифференциальной составляющей в случае воздействия на объект сильных высокоскоростных возмущений. Пятая кривая соответствует воздействию на регулируемую величину пропорционального регулятора с широкой зоной пропорциональности. Ошибка регулирования велика, отсутствует колебательный процесс.
|
Последнее изменение этой страницы: 2019-03-31; Просмотров: 739; Нарушение авторского права страницы


 Для ПИД регулятора закон регулирования может быть представлен тремя различными модификациями, различающимися видом параметров настройки. Отсутствие общепринятой системы параметров часто приводит к путанице. Это надо помнить при замене одного ПИД - контроллера на другой или использовании программ настройки параметров.
Для ПИД регулятора закон регулирования может быть представлен тремя различными модификациями, различающимися видом параметров настройки. Отсутствие общепринятой системы параметров часто приводит к путанице. Это надо помнить при замене одного ПИД - контроллера на другой или использовании программ настройки параметров. где Кр, Ti и Td - пропорциональный коэффициент, постоянная интегрирования и постоянная дифференцирования
где Кр, Ti и Td - пропорциональный коэффициент, постоянная интегрирования и постоянная дифференцирования ,
, – скорость его перемещения мм/с.
– скорость его перемещения мм/с.

 будет уменьшаться.
будет уменьшаться. . Если принять Kр = 1, то плунжер клапана будет перемещаться синхронно с изменением уровня воды. Скорость его закрывания будет уменьшаться по мере замедления роста уровня воды, а в тот момент, когда выражение
. Если принять Kр = 1, то плунжер клапана будет перемещаться синхронно с изменением уровня воды. Скорость его закрывания будет уменьшаться по мере замедления роста уровня воды, а в тот момент, когда выражение 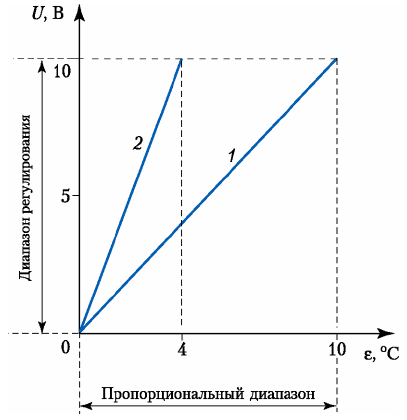 Пропорциональный диапазон, диапазон регулирования, коэффициент регулирования пропорционального регулятора
Пропорциональный диапазон, диапазон регулирования, коэффициент регулирования пропорционального регулятора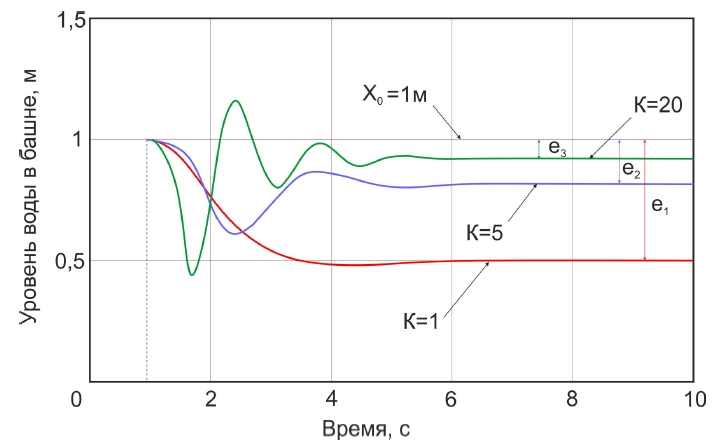

 видно, что когда значение e станет равным 0, (уровень вернулся на метку 10 м) регулятор остановит привод клапана, и процесс регулирования закончится. Регулятор будет до этого момента непрерывно перемещать при помощи привода плунжер клапана А с постепенно изменяющейся скоростью. Уровень воды будет колебаться в районе X0 = 10 м, амплитуда колебаний со временем будет уменьшаться и, в конце концов, станет равной нулю. Процессу регулирования будет помогать способность системы к самовыравниванию за счет гидростатического давления.
видно, что когда значение e станет равным 0, (уровень вернулся на метку 10 м) регулятор остановит привод клапана, и процесс регулирования закончится. Регулятор будет до этого момента непрерывно перемещать при помощи привода плунжер клапана А с постепенно изменяющейся скоростью. Уровень воды будет колебаться в районе X0 = 10 м, амплитуда колебаний со временем будет уменьшаться и, в конце концов, станет равной нулю. Процессу регулирования будет помогать способность системы к самовыравниванию за счет гидростатического давления.

 и
и 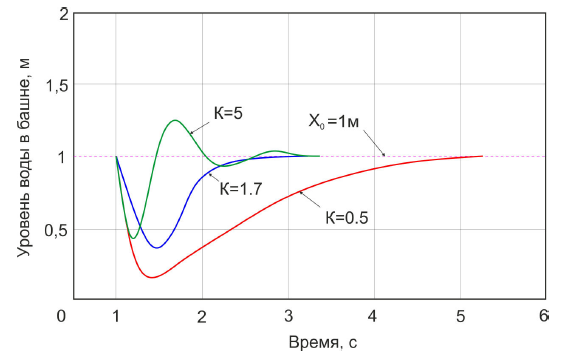 Влияние коэффициента K i интегрального регулятора на график переходного процесса
Влияние коэффициента K i интегрального регулятора на график переходного процесса

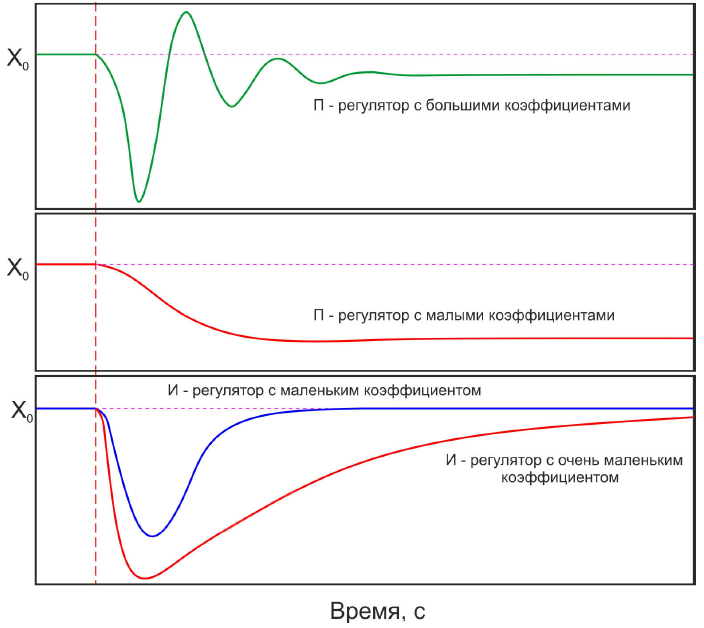
 Шестая кривая соответствует работе интегрального закона регулирования с небольшими значениями коэффициента настройки. Процесс регулирования при очень малых значениях коэффициента может затянуться до бесконечности.
Шестая кривая соответствует работе интегрального закона регулирования с небольшими значениями коэффициента настройки. Процесс регулирования при очень малых значениях коэффициента может затянуться до бесконечности.