
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Когерентна радіолокація із синтезованою апертурою
Одним із цікавих застосувань методів оптичної обробки інформації є побудова карт земної поверхні із високою роздільною здатністю за допомогою радіоло- кації бічного огляду. В класичній радіолокації існує просте співвідношення: чим більший розмір антени і чим менша довжина хвилі, тим вища кутова роздільна здатність радіолокатора: Для того, щоб отримати роздільну здатність не гіршу ніж при аерофотозйомці потрібно застосовувати анте- ну дуже великого розміру. Наприклад, якщо частота сигналу радіолокації 9000 МГц, то для отримання роздільної здатності порівняльної із оптичною розміри
антени повинні бути близько 2000 м. Практично, дуже важко виготовити таку антену, тим більше помістити її на літак. Подолати дифракційне обмеження чіткості радіолокаційних зображень вдалося за допомогою ко герентної оптичної обробки радіолокаційного сигналу. Розглянемо принцип роботи когерентної радіолокаційної станції бічного огляду. Радіолокаційна станція розташована на літаку, який рухається із постійною швидкістю За час когерентності літак пролітає декілька сотень, а може навіть тисяч метрів. Утворюється своєрідна синтезована антена, яка складається із сукупності „фіктивних” когерентних радіолокаційних диполів – еквівалентних елементам реальної антени. Нехай в зоні огляду є точковий об’єкт - ціль, який розташований в точці із азимутом
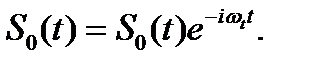
Рис. 5.14. а) радіолокація бічного огляду; б) схема траєкторії польоту (координати інтерференції плоскої хвилі, яку створюють диполі синтезованої антени, та сферичної хвилі відбитої від цілі (рис. 5.15). Вихідна напруга синхронного детектора – пропорційна до інтенсивності інтерференційної картини подається на електронно- променеву трубку і фотографується на плівку. Когерентна довжина, вздовж якої можна накопи- чувати дані про одну точку, залежить від ширини імпульсу. Чим ширший імпульс, тим більше даних можна накопичити про одну ціль. Ширина імпульсу збільшується із зменшенням лінійних розмірів антени. Звідси парадоксальний висновок: чим менша антена, тим краща кутова роздільна здатність. Розглянемо тепер це більш детально, нехай переда- вач радіолокатора випромінює монохроматичний сигнал із частотою Сигнал, який приходить від цілі до приймача, мо- же бути записаний у вигляді:
Рис. 5.15. Взаємодія сферичної хвилі від цілі та синтезованої антени. де де швидкість якщо дальність значно більша переміщення літака Якщо літак рухається прямолінійно із постійною швидкістю Підставимо це у вираз для сигналу (5.40) і врахуємо, що Якщо земну поверхню на дальності r1 розглядати як сукупність точкових джерел радіохвиль тоді повний сигнал, прийнятий локатором, це сума сигналів від різних цілей: Для того, щоб зареєструвати як амплітуду, так і фазу прийнятого сигналу використовують сигнал від генератора, який виконує роль опорного сигналу. Для цього спочатку додають ці сигнали, а потім подають на квадратичний детектор. Математично це еквіва- лентно виконанню таких операцій: В оптиці такими самими виразами описується ін- тенсивність інтерференційної картини двох хвиль. Синхронне детектування еквівалентно зменшенню несучої частоти радіолокатора
Рис. 5.16. а) схема запису даних локатора бічного огляду: ЕПТ – електронно-променева трубка, фотоплівка; б) фрагмент плівки із записаним сигналом Отримана напруга Отриманий сигнал (5.49) розгортається вертикально на екрані електронно-променевої трубки локатора протягом певного проміжку часу. Вертикальна розгортка відповідає дальності. Перед екраном протягується фотоплівка із постійною швидкістю
де між координатою Для того, щоб зрозуміти, що отримано на плівці по- вернемося до розгляду поодинокої цілі. Під час переміщення променя вверх вздовж осі дальності, радіосигнал відбитий від цілі, з’явиться тільки при певному значенні часової затримки, яка відповідає подвоєній величині дальності. На плівці виникне по- слідовність точок, яка буде складати пунктирну горизонтальну лінію – лінія однакової дальності. Коефіцієнт пропускання вздовж цієї лінії буде змінюватися від точки до точки (рис. 5.17).
Рис. 5.17. Інтерференційна картина записана на плівку для 2-х цілей із координатами
Модуляція пропускання плівки цілі рис. 5.15). Коли літак знаходиться на мінімальній відстані від цілі, чергування максимумів та мінімумів буде найбільш повільним. Таким чином, на плівці буде записана інтерференційна картина. Чим більша дальність (відстань від літаку до цілі), тим вище на плівці буде розташована інтерференційна картина, і тим більша відстань на плівці між сусідніми максимумами, оскільки чим далі ціль, тим кривизна фронту відбитої сферичної хвилі буде менша і, від точки до точки прийому сигналу, різниця ходу буде меншою. Нанесені на плівку одномірні інтерференційні картини, які містять дані про координати предметів на земній поверхні, необхідно перетворити так, щоб отримати зображення земної поверхні. Для відтворення карти земної поверхні застосовують когерентну оптичну систему - плівку засвічують плоскою монохроматичною хвилею, наприклад, лазерним випромінюванням: Де Якщо у коефіцієнті пропускання Де
Розглянемо лише одну ціль, наприклад із номером і, тоді відповідна компонента Перший експоненціальний множник вносить лінійну фазову затримку в залежності від де а центр лінзи розташований на плівці в точці із координатою
Перший доданок відповідає за послаблення плоскої хвилі, але не змінює її фазу. Другий доданок змінює як амплітуду, так і фазу – утворюється хвиля із циліндричним фронтом, яка створить дійсне зображення. Оскільки фокусуючі властивості є тільки вздовж осі
кою. Третій доданок є комплексно спряжений до другого і описує розбіжну циліндричну хвилю, яка утворює уявне зображення лінії перед плівкою (рис. 5.18). Якщо на поверхні землі, на відстані
Рис. 5.18. Дифракція світла на фотоплівці. азимутального розподілу цілей, які мають однакову дальність
Рис. 5.19. Відображення азимутальних сигналів на похилу площину них сигналів і площина сигналів дальності не співпадають. Для того, щоб „вирівняти” азимутальну площину і сумістити її із площиною дальності, необхідно ввести в когерентну оптичну систему лінзу в якої фокусна відстань залежить лінійно від координати у. Цим вимогам задовольняє конічна лінза із коефіцієнтом пропускання: по азимутальній осі вона є циліндричною, а її фокусна відстань повинна лінійно залежати від дальності цілі Ця лінза прикладається впритул до площини плів- ки. Вона перетворює циліндричний хвильовий фронт хвилі після плівки в плоский, таким чином „перено- сить” уявне зображення похилої площини азимутального розподілу в нескінченність. Тепер, інформація про азимути цілей – це напрямки на розташовані в нескінченності уявні лінійні джерела світла. Для того, щоб лінії перетворити в точки, які відповідають об’єктам на земній поверхні, необхідно використати циліндричну лінзу. Якщо плівку розташу-
вати в фокальній площині циліндричної лінзи, то отримаємо зображення в нескінченності. Таким чином досягається суміщення площин азимуту та дальності – вони знаходяться в нескінченності. Перетворити уявне зображення, розташоване в нескінченності, в дійсне можна, додавши до оптичної системи сферичну збирну лінзу. Ця лінза створює дійсне зображення цілей в фокальній площині. Оптична система, яка відтворює зображення земної поверхні за даними радіолокації бічного огляду зображена на рис. 5.20. Ефективність оптичного методу обробки даних радіолокації бічного огляду пояснюється надзвичайною легкістю, із якою когерентна оптична система вико- нує складні і заплутані лінійні перетворення необхідні для відтворення зображення. Така простота обумовлена однаковим характером законів, які описують поширення радіохвиль відбитих від земної поверхні
Рис. 5.20. Когерентний оптичний пристрій для від- новлення зображення земної поверхні в радіолокації бічного огляду, ФП – фотоплівка із записаними інтерферограмами,
та поширення світлових хвиль в когерентній оптичній системі відтворення зображення.
Контрольні питання
1. Намалюйте оптичну схему і поясніть принцип дії оптичного спектроаналізатора. 2. Намалюйте оптичну схему та поясніть принцип дії аналізатора спектра сигналів надвисокої частоти. 3. Намалюйте оптичну схему досліду Аббе-Портера та поясніть, як залежить зображення від типу та розміру діафрагми. 4. Як можна покращити контраст зображення? 5. Намалюйте оптичну схему для отримання згортки двох функцій. Поясніть принцип дії. 6. Намалюйте оптичну схему та поясніть принцип узгодженої фільтрації. Які переваги цього методу? 7. Намалюйте оптичну схему для синтезу фільтра Вандер Люгта. Яким чином на фотопластинку за- писується інформація про розподіл фази електромагнітної хвилі? 8. Чому для отримання більшої роздільної здатності в радіолокації бічного огляду необхідно застосовува- ти якомога меншу антену? 9. Чому радіолокацію бічного огляду називають ра- діолокацією із синтезованою апертурою? 10.Поясніть вигляд інтерференційної картини, яка записується на фотоплівку під час реєстрації да- них в радіолокаторі бічного огляду. 11. Намалюйте оптичну схему та поясніть принцип відновлення зображення земної поверхні згідно даних радіолокації бічного огляду.
Задачі
1. На вхід когерентної оптичної системи обробки ін- формації, зображену на рис. 5.5 (розділ 31.2), подали сигнал у вигляді транспаранту із амплітудним пропусканням 2. Транспарант містить сигнал із адитивною складо- вою білого гауссівського шуму. Запропонуйте схему для оптичної фільтрації сигналу:
знайдіть простий амплітудний фільтр, який значно збільшить співвідношення сигнал/шум. 3. Показати, що розташування вхідного сигналу відносно узгодженого фільтра впливає тільки на розташування положення максимуму вихідного сигналу.
VI. ДОДАТКИ |
Последнее изменение этой страницы: 2019-04-09; Просмотров: 316; Нарушение авторского права страницы

 (5.38)
(5.38) по прямій і постійно випромінює радіо-імпульси із певним інтервалом (рис. 5.14). Нехай ця послідовність імпульсів направлена на землю, радіолокаційна станція приймає відбиті сигнали від поверхні, яка розташована біля літака – зона огляду. Назвемо координату вздовж напряму польоту, вісь OX - азимутом, а відстань від літака від об’єкту – дальністю (
по прямій і постійно випромінює радіо-імпульси із певним інтервалом (рис. 5.14). Нехай ця послідовність імпульсів направлена на землю, радіолокаційна станція приймає відбиті сигнали від поверхні, яка розташована біля літака – зона огляду. Назвемо координату вздовж напряму польоту, вісь OX - азимутом, а відстань від літака від об’єкту – дальністю (  на рис. 5.14 б). Завдяки високій стабільності частоти генератора сигнал радіолокатора залишається когерен- тним протягом великого інтервалу часу.
на рис. 5.14 б). Завдяки високій стабільності частоти генератора сигнал радіолокатора залишається когерен- тним протягом великого інтервалу часу. і дальністю
і дальністю  . Хвилі, які відбиті від цілі, матимуть сферичний фронт. Внаслідок високої когерентності опорний сиг- нал у всіх „фіктивних” диполях синтезованої антени має однакову фазу і відповідно має плоский хвильовий фронт. Ця плоска хвиля поширюється перпендикулярно до траєкторії польоту. Прийнятий сигнал від цілі, у вигляді сферичної хвилі, комбінують із опорним від генератора у спеціальному електронному пристрої, який є чутливий до різниці фаз сигналів - синхронному детекторі. Вимірювання різ- ниці фаз сигналів - це електронний еквівалент
. Хвилі, які відбиті від цілі, матимуть сферичний фронт. Внаслідок високої когерентності опорний сиг- нал у всіх „фіктивних” диполях синтезованої антени має однакову фазу і відповідно має плоский хвильовий фронт. Ця плоска хвиля поширюється перпендикулярно до траєкторії польоту. Прийнятий сигнал від цілі, у вигляді сферичної хвилі, комбінують із опорним від генератора у спеціальному електронному пристрої, який є чутливий до різниці фаз сигналів - синхронному детекторі. Вимірювання різ- ниці фаз сигналів - це електронний еквівалент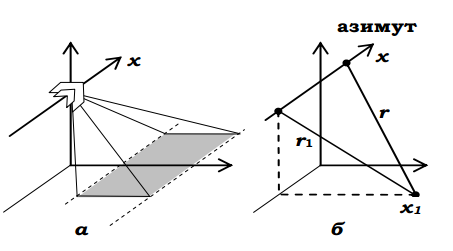
 – азимут,
– азимут,  та амплітудою
та амплітудою  :
:  (5.39)
(5.39) (5.40)
(5.40)
 - час запізнення радіохвилі, яка повертається від цілі,
- час запізнення радіохвилі, яка повертається від цілі,  - комплексна константа, яка враховує коефіцієнт відбивання цілі в т
- комплексна константа, яка враховує коефіцієнт відбивання цілі в т  та послаблення сигналу в просторі. Час запізнення радіохвилі можна знайти знаючи відстань
та послаблення сигналу в просторі. Час запізнення радіохвилі можна знайти знаючи відстань  від літака до цілі:
від літака до цілі:  (5.41)
(5.41) поширення радіохвилі. Відстань
поширення радіохвилі. Відстань  можна виразити через координати цілі дальність
можна виразити через координати цілі дальність  , азимут
, азимут  :
:  (5.42)
(5.42) то вираз (5.42) можна розкласти в ряд:
то вираз (5.42) можна розкласти в ряд:  (5.43)
(5.43) , то його азимут, координата
, то його азимут, координата  Отже, час затримки:
Отже, час затримки:  (5.44)
(5.44) де
де  - довжина хвилі локатора.
- довжина хвилі локатора. (5.45)
(5.45) (5.46)
(5.46) (5.47)
(5.47) до якоїсь іншої несучої частоти
до якоїсь іншої несучої частоти  . На виході синхронного детектора матимемо електричну напругу яка є пропорційною до дійсної частини сигналу:
. На виході синхронного детектора матимемо електричну напругу яка є пропорційною до дійсної частини сигналу:  . (5.48)
. (5.48)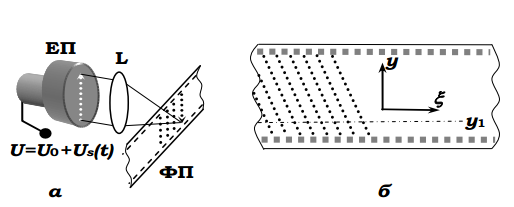
 – лінза, ФП -
– лінза, ФП - використовується для модуляції інтенсивності випромінювання електронно-променевої трубки локатора. Оскільки функція косинус може мати як додатне так і від’ємне значення, а інтенсивність є додатня величина, то для відображення від’ємних значень
використовується для модуляції інтенсивності випромінювання електронно-променевої трубки локатора. Оскільки функція косинус може мати як додатне так і від’ємне значення, а інтенсивність є додатня величина, то для відображення від’ємних значень  вводять постійне зміщення:
вводять постійне зміщення:  (5.49)
(5.49) , на неї записується послідовність розгорток сигналу (рис. 5.16). Якщо чутливість плівки та інтенсивність свічення екрану підібрані правильно, то сигнал буде записано на фотоплівку у вигляді амплітудного коефіцієнта пропускання:
, на неї записується послідовність розгорток сигналу (рис. 5.16). Якщо чутливість плівки та інтенсивність свічення екрану підібрані правильно, то сигнал буде записано на фотоплівку у вигляді амплітудного коефіцієнта пропускання:  (5.50)
(5.50) - постійне пропускання, яке відповідає напрузі зміщення
- постійне пропускання, яке відповідає напрузі зміщення  ,
,  константа, а
константа, а  відповідають координатам плівки. Час замінили із співвідношення
відповідають координатам плівки. Час замінили із співвідношення та швидкістю протягування плівки
та швидкістю протягування плівки  і відповідно
і відповідно  . Вертикальна
. Вертикальна  координата y відповідає дальності до цілі, а горизонтальна
координата y відповідає дальності до цілі, а горизонтальна 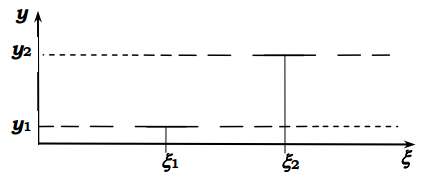
 та
та  , яким відповідають координати та
, яким відповідають координати та  виникає внаслідок інтерференції сферичної хвилі відбитої від цілі із опорною плоскою хвилею, яку випромінює синтезована антена (рис. 5.15). Коли літак підлітає до цілі, то чергування максимумів та мінімумів інтерференційної картини відбувається спочатку швидко (різниця ходу сильно змінюється від точки до точки), а потім уповільнюються із наближенням літаку до цілі ( різниця ходу змінюється менше із наближенням до
виникає внаслідок інтерференції сферичної хвилі відбитої від цілі із опорною плоскою хвилею, яку випромінює синтезована антена (рис. 5.15). Коли літак підлітає до цілі, то чергування максимумів та мінімумів інтерференційної картини відбувається спочатку швидко (різниця ходу сильно змінюється від точки до точки), а потім уповільнюються із наближенням літаку до цілі ( різниця ходу змінюється менше із наближенням до (5.51)
(5.51) частота, а
частота, а  - довжина хвилі лазерного випромінювання, амплітуду, для спрощення розгляду, приймемо рівною одиниці. Безпосередньо за плівкою просторовий розподіл поля:
- довжина хвилі лазерного випромінювання, амплітуду, для спрощення розгляду, приймемо рівною одиниці. Безпосередньо за плівкою просторовий розподіл поля:  (5.52)
(5.52) замінити функцію косинус на суму 2-х експонент, то вираз (5.50) матиме вигляд:
замінити функцію косинус на суму 2-х експонент, то вираз (5.50) матиме вигляд:  (5.53)
(5.53) (5.54)
(5.54)
 (5.55)
(5.55) . Другий множник вносить зміну фази таку, як циліндрична лінза:
. Другий множник вносить зміну фази таку, як циліндрична лінза:  (5.56)
(5.56) - фокусна відстань,
- фокусна відстань,  - довжина хвилі світла. Порівнюючи (5.55) та (5.56) знаходимо, що область на плівці в точці діє
- довжина хвилі світла. Порівнюючи (5.55) та (5.56) знаходимо, що область на плівці в точці діє  (5.57)
(5.57) Фокусна відстань цієї лінзи прямо пропорційна до дальності цілі. Таким чином, на стадії відновлення зображення геометричним місцем де будуть фокусуватися зображення об’єктів, які освітлює радіолокатор, буде площина нахилена до оптичної осі. Поле після плівки можна записати у вигляді трьох доданків, що відповідає трьом світловим хвилям (рис. 5.18):
Фокусна відстань цієї лінзи прямо пропорційна до дальності цілі. Таким чином, на стадії відновлення зображення геометричним місцем де будуть фокусуватися зображення об’єктів, які освітлює радіолокатор, буде площина нахилена до оптичної осі. Поле після плівки можна записати у вигляді трьох доданків, що відповідає трьом світловим хвилям (рис. 5.18):  (5.58)
(5.58) від літака, є багато об’єктів розсіяння, то кожному із них відповідає своя пара ліній фокусування – дійсна і уявна. Відносному розташуванню об’єктів на поверхні землі відповідає відносне розташування центрів лінзоподібних структур на плівці і відповідно відносне розташування ліній фокусування. Таким чином, як перед, так і за плівкою утвориться повна картина
від літака, є багато об’єктів розсіяння, то кожному із них відповідає своя пара ліній фокусування – дійсна і уявна. Відносному розташуванню об’єктів на поверхні землі відповідає відносне розташування центрів лінзоподібних структур на плівці і відповідно відносне розташування ліній фокусування. Таким чином, як перед, так і за плівкою утвориться повна картина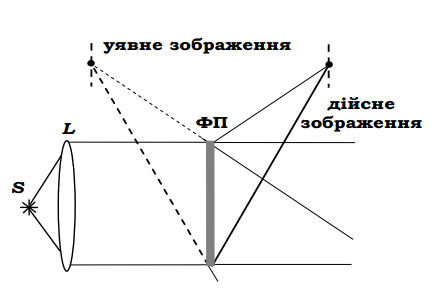
 (рис. 5.16 б), тому, щоб отримати розподіл по дальності, необхідно відобразити зміну пропускання вздовж осі
(рис. 5.16 б), тому, щоб отримати розподіл по дальності, необхідно відобразити зміну пропускання вздовж осі  в площину фокусування азимутальних сигналів. Це не просто, оскільки точки фокусування азимутальних сигналів залежать від дальності, тобто від координати y на плівці (формула (5.57)), і лежать на похилій площині (рис. 5.19) – площина азимуталь-
в площину фокусування азимутальних сигналів. Це не просто, оскільки точки фокусування азимутальних сигналів залежать від дальності, тобто від координати y на плівці (формула (5.57)), і лежать на похилій площині (рис. 5.19) – площина азимуталь-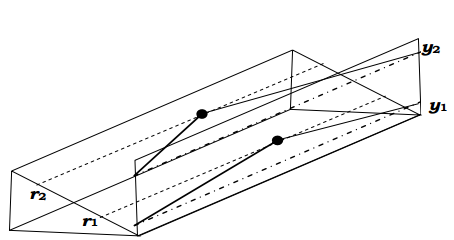
 (5.59)
(5.59) (5.60)
(5.60)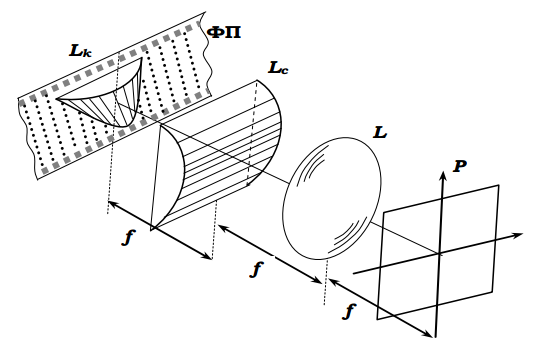
 – конічна лінза,
– конічна лінза,  – циліндрична лінза,
– циліндрична лінза,  – сферична лінза,
– сферична лінза,  – вихідна площина.
– вихідна площина. . Інтенсивність вихідного сигналу реєструється на лінійній фотопластинці. Доведіть, що розподіл електромагнітного поля на виході оптичної системи буде пропорційний до функції автокореляції, якщо записану фотопластинку розташувати у площині
. Інтенсивність вихідного сигналу реєструється на лінійній фотопластинці. Доведіть, що розподіл електромагнітного поля на виході оптичної системи буде пропорційний до функції автокореляції, якщо записану фотопластинку розташувати у площині  .
.
 ,
,