|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Если курсовой угол объекта маневра q к острый, то курсовой угол маневрирующего корабля q м должен быть тупым, т.к. ОВИР в каждый момент маневра должна быть равна нулю.
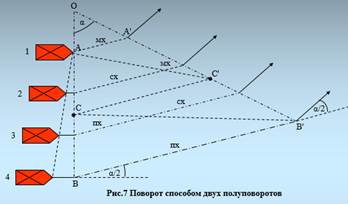
2. При соотношении скоростей маневрирующего корабля и объекта маневра V м/ V к >1 удержание постоянной дистанции возможно на любых курсовых углах объекта маневра. 3. При соотношении скоростей маневрирующего корабля и объекта маневра V м/ V к =1 удержание постоянной дистанции возможно на постоянном курсе, параллельном курсу объекта маневра. 4. При соотношении скоростей маневрирующего корабля и объекта маневра V м/ V к <1 удерживать идущий прямым курсом объект маневра на постоянной дистанции существует не всегда, а лишь при ограниченных значениях курсового угла объекта маневра, а именно: - при нахождении маневрирующего корабля на острых курсовых углах объекта маневра эти предельные значения определяются, если принять q м = 180°, тогда cosq к = + V м / V к; - при нахождении маневрирующего корабля на тупых курсовых углах объекта маневра эти предельные значения определяются, если принять q м = 0°,тогда cosq к = - V м / V к. Пользуясь выражениями cosq к = + V м / V к и cosq к = - V м / V к можно рассчитать таблицу граничных курсовых углов q к объекта маневра в пределах которых возможно удерживать постоянную дистанцию при V м/ V к <1. Вывод по 1-му вопросу: 1. Для достижения постоянства дистанции при маневрировании относительно объекта маневра необходимо соблюдение условия ВИРм + ВИРк = 0, V м cosq м = - V к cosq к. 2. Изменение курса строя способом двух полуповоротов. Поворот способом двух полуповоротов называется такое изменение направ-ления движения строя (ордера), при котором корабли дважды поворачивают на половину общей величины изменения курса при общих для всех кораблей линии начала поворота и линии конца поворота (рис.7). В отличие от поворотов захождения при повороте способом двух полупово-ротов скорости движения кораблей на промежуточных курсах строго регла-ментированы наличием линии перемены ходов, что обеспечивает бóльшую точность и безопасность поворота, хотя при этом несколько увеличивает время маневра. Этот способ чаще всего применяется при плавании в строю фронта. Изменение курса способом двух полуповоротов производится в такой последовательности: - по сигналу флагмана головной корабль №1 поворачивает на угол, равный половине угла изменения курса α/2, остальные корабли совершают поворот самостоятельно с приходом на линию первого полуповорота ОВ (если корабли идут строем фронта, то все корабли строя поворачивают «все вдруг» на угол, равный половине угла изменения курса α/2); - крайний внутренний (относительно стороны поворота) корабль №1(А) сразу после окончания поворота дает малый ход, корабль №2, находящийся от средней точки С в сторону крайнего внутреннего корабля №1, дает сред-ний ход, корабли №3 и №4, находящиеся от средней точки строя С в сторону крайнего внешнего корабля №4, продолжают после поворота идти полным ходом; - на линиях перемены ходов АС' и СВ' производится изменение ходов внут-ренним кораблям №2 со среднего на малый, а внешним кораблям №3 с полного на средний; - с выходом на линию второго полуповорота ОВ' каждый корабль самостоя-тельно ложится на объявленный курс и дает полный ход.
БИЛЕТ №12 1.Возможности тихоходного корабля при маневрировании на сближение с быстроходным объектом манёвра. Предельным курсовым углом Q пр объекта маневра называется наибольшее значение его курсового угла, находясь на котором маневрирующий корабль со скоростью хода меньшей, чем скорость хода объекта маневра, еще может сблизиться с ним на заданное расстояние D зад. Суть вопроса Если объект маневра имеет скорость большую, чем скорость хода, которой маневрирующий корабль может выполнять маневр, то сближение на заданное расстояние не всегда оказывается возможным. Вопрос о возможности такого сближения сводится в конечном итоге к определению того кратчайшего расстояния D кр, на которое маневрирующий корабль может сблизиться с объектом маневра из данной начальной позиции. Условием возможности сближения на заданное расстояние D зад является выполнение неравенства D кр ≤ D зад. Если это неравенство выполняется, то маневрирующий корабль имеет возможность на расстояние даже меньшее чем D зад. И наоборот, если это неравенство не выполняется, то маневрирующему кораблю, как бы он не маневрировал, не удастся приблизиться к объекту маневра даже на расстояние большее, чем заданное, следовательно, на заданное расстояние он тем более сблизиться не сможет. В соответствии с формулой расчета D кр= D 0 sin ( q к0- Q ), вышеуказанное неравенство D кр ≤ D зад примет вид: D 0 sin ( q к0- Q ) ≤ D зад, или что тоже самое sin ( q к0- Q ) ≤ D зад/ D 0; q к0- Q ≤ arcsin D зад/ D 0; q к0 ≤ Q +Δ Q , где Δ Q = arcsin D зад/ D 0, а Q пр= Q +Δ Q . Из последнего выражения видно, что сумма критического курсового угла Q и величина Δ Q , именуемой поправкой критического курсового угла, есть предельный курсовой угол Q пр который является критерием для суждения о возможностях тихоходного корабля при его маневрировании на сближение с быстроходным кораблем. Для расчета величин Q и Δ Q служит таблица № 2.36 Мореходных таблиц (МТ-2000). |
Последнее изменение этой страницы: 2019-04-11; Просмотров: 244; Нарушение авторского права страницы