|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Кц, V ц – курс и скорость цели.
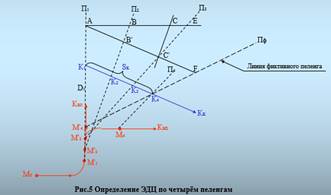
Следовательно, для полного определения ЭДЦ нужно выполнить не менее четырех независимых измерений каких-либо величин, являющихся функциями места цели, ее курса и скорости. В зависимости от измеряемых параметров различают следующие способы определения ЭДЦ:- по пеленгам и дистанциям; - по пеленгам; - комбинированные способы. в) Определение ЭДЦ по четырём пеленгам Суть решения задачи Обнаружив цель (объект маневра) маневрирующий корабль ложится на курс, равный пеленгу на цель (рис.5). На этом курсе при возможно меньшей скорости хода измеряются три пеленга на цель. В момент измерения третьего пеленга маневрирующий корабль увеличивает скорость хода и начинает поворот на новый курс, на котором измеряется четвертый пеленг на цель. При этом промежутки времени между измерениями все четырех пеленгов должны быть одинаковыми.
3.Условием, повышающим степень точности определения дистанции до объекта маневра с помощью четвертого пеленга, будет такое маневрирование, при котором линия четвертого пеленга на объект маневра будет пересекать линию фиктивного пеленга под углом, близким к 90°.
БИЛЕТ №21 1. Пересечение курса быстроходного объекта манёвра по корме в минимальном расстоянии.
а) по корме в минимальном расстоянии: Суть вопроса Задача пересечения курса быстроходного объекта маневра по корме в минимальном расстоянии по существу является составной частью задачи сближения на кратчай-шее расстояние. Т.к. скорость хода маневрирующего корабля М меньше, чем ско-рость хода объекта маневра К, то очевидно, что после сближения на кратчайшее расстояние корабль М не сможет удерживать эту дистанцию. Если маневрирующий корабль будет продолжать маневр курсом, перпендикулярным границе критического курсового угла, то в результате он пересечет курс объекта маневра по корме в воз-можно минимальном расстоянии. Данная задача имеет смысл, при V м< V к и q к0> Q , т.е. при нахождении корабля М за пределами критического курсового угла. В этом слу-чае, чтобы пересечь курс быстроходного объекта маневра по корме в минимальном расстоянии, корабль М должен маневрировать курсом, линия которого составляет прямой угол с границей критического курсового угла, т.к. только в этом случае линия относительного движения его будет располагаться по границе сектора доступ-ных позиций и пересечет курс объекта по корме в минимальном расстоянии Dmin . На маневренном планшете: ● Начальную позицию объекта маневра К0 принимаем в центре планшета и считаем его условно неподвижным. ● Ориентируем планшет и избираем масштаб для построения треугольников скоростей и позиций. ● По начальному пеленгу П0 и дистанции D 0 наносим начальную позицию маневрирующего корабля М0 (рис.10). ● При центре планшета строим прямоугольный треугольник скоростей с крити-ческим курсовым углом Q , для чего по курсу объекта маневра Кк наносим век-тор скорости V к и из конца этого вектора проводим касательную к окружности, радиус которой равен скорости маневрирующего корабля V м, при чем проводим ту касательную, при которой линия относительного перемещения, проведенная из начальной позиции маневрирующего корабля М0 параллельно вектору отно-сительной скорости Vρ , пройдет в минимальном расстоянии от центра планше-та. Из центра планшета проводим перпендикуляр на касательную, который и определит искомый курс маневрирующего корабля Км, направление касатель-ной – относительный курс Кρ, а длина от конца вектора скорости V к до конца вектора скорости V м определит величину относительной скорости Vρ . ● Строим треугольник позиций М0К0М'1, для чего из начальной позиции манев-рирующего корабля М0, параллельно касательной, проводим линию относитель-ного курса Кρ до пересечения ее с линией курса объекта маневра Кк в точке М'1, которая определяет новую относительную позицию маневрирующего корабля в конце маневра. Сторона треугольника позиций К0М'1= Dmin , а сторона М0М'1= Sρ , измеряем их величины. ● Рассчитываем время маневра: t = Sρ / Vρ . 2. Изменение курса ордера способом разделения.
Поворот способом разделения (рис.4). Сущность способа состоит в том, что корабли охранения во время поворота разделяются на две группы и изменя-ют после поворота свои тактические номера и соответствующие им позиции относительно уравнителя. Разделение происходит на линии разделения, которая проводится через центр ордера в момент начала поворота. Как правило, линия разделения совпадает с новым курсом ордера, однако в отдельных случаях, в целях обеспечения безопасности маневрирования линия разделения может назначаться флагманом не параллельно линии нового курса. Поворот способом разделения допускает изменение курса при больших углах отворота (более 60º) и позволяет производить его в кратчайший срок. При плавании ночью и в плохую видимость изменять курс способом разделения не рекомендуется.
Порядок выполнения - по сигналу флагмана на всех кораблях охранения определяются новые позиции и рассчитываются курсы выхода на них; - по исполнительному сигналу корабли охранения одновременно ложатся на рассчитанные курсы и маневрируют скоростями, чтобы занять позиции к моменту окончания поворота уравнителя на новый курс; - охраняемые корабли, не изменяя скорости хода, следуют прежним курсом и после прохода расстояния, равного удалению ближнего охранения от центра ордера, ложатся на новый курс; - заняв позиции относительно уравнителя на новом курсе, корабли охранения самостоятельно ложатся на новый курс и удерживают места в ордере. Корабль охранения №1 идет в позицию №6 и получает соответственно этому №6 в охранении после поворота. Аналогично ему изменяют свои позиции и номера и остальные корабли охранения: №2 на №5, №3 на №4, №4 на №3, №5 на №2, №6 на №1. Поворот способом разделения имеет преимущество перед поворотом способом захождения при значительных углах поворота, так как он сокращает общее время маневра за счет назначения новых позиций кораблям охранения, что уменьшает длины путей, проходимых ими при выполнении поворота. Вместе с тем поворот способом разделения более сложен в исполнении, так как корабли охранения должны поворачивать в разные стороны, их курсы для занятия новых позиций могут пересекаться, что не исключает возможности опасного сближения. БИЛЕТ №22 1.Сближение с быстроходным объектом манёвра на кратчайшее расстояние. Суть вопроса Необходимость решение данной задачи возникает в условиях, когда скорость манев-рирующего корабля меньше скорости объекта маневра и курсовой угол q к0> Q , т.е. позиция тихоходного маневрирующего корабля находится за пределами критическо-го курсового угла, а нужно сблизиться на кратчайшее расстояние с быстроходным объектом маневра. В этих условиях курс сближения на кратчайшее расстояние с объектом маневра, на котором наилучшим образом реализуются скоростные возмож-ности маневрирующего корабля по сокращению дистанции до быстроходного объек-та маневра, является курс, перпендикулярный ближайшей границе критического курсового угла, построенного при объекте маневра. Вектор скорости маневрирующе-го корабля V м, удовлетворяющий условию сближения на кратчайшее расстояние, также должен быть перпендикулярен стороне критического курсового угла. Курс маневрирующего корабля Км для сближения на кратчайшее расстояние может быть найден по формуле Км = Кк + Q - 90°, если маневрирующий корабль находится на правом борту объекта маневра, или Км = Кк - Q + 90°, если маневрирующий корабль находится на левом борту объекта маневра. Величина угла отворота q м0 от пеленга на объект маневра в начале маневра рассчи-тывается по формуле q м0 = 90° - ( q к0 – Q ). Кратчайшее расстояние D кр сближения с быстроходным объектом маневра рассчи-тывается по формуле D кр = D 0× sin ( q к0 – Q ). Чтобы сблизиться с быстроходным объектом маневра на минимальную дистанцию D кр, маневрирующий корабль должен пройти расстояние, равное S м = D 0× cos ( q к0 – Q )× tgQ . |
Последнее изменение этой страницы: 2019-04-11; Просмотров: 405; Нарушение авторского права страницы