
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Автоматические системы регулирования.Структурная схемаСтр 1 из 5Следующая ⇒
Автоматические системы регулирования.Структурная схема Системы автоматического регулирования (САР) применяются для регулирования отдельных параметров (температура, давление, уровень, расход и т.д.) в объекте управления. В современных системах автоматического управления (САУ) системы автоматического регулирования являются подсистемами САУ и их применяют для регулирования различных параметров при управлении объектом или процессом. Принцип действия всякой системы автоматического регулирования (САР) заключается в том, чтобы обнаруживать отклонения регулируемых величин, характеризующих работу объекта или протекание процесса от требуемого режима и при этом воздействовать на объект или процесс так, чтобы устранять эти отклонения.
Для осуществления автоматического регулирования к регулируемому объекту подключается автоматический регулятор, вырабатывающий управляющее воздействие на регулирующий орган. Это управляющее воздействие вырабатывается регулятором в зависимости от разности между текущим значением регулируемой величины (температуры, давления, уровня жидкости и т. д.), измеряемой датчиком, и желаемым её значением, устанавливаемым задатчиком. Регулируемый объект и автоматический регулятор вместе образуют систему автоматического регулирования. Основным признаком САР, является наличие главной обратной связи, по которой регулятор контролирует значение регулируемого параметра. Ряд Фурье Ряд Фурье - это ряд из тригонометрических функций, в который можно разложить функцию f(x), определенную на некотором сегменте (-a; a). Все разложение в ряд Фурье сводится к нахождению коэффициентов ряда, а для этого нужно уметь интегрировать тригонометрические функции.
Преобразование Фурье (символ ℱ ) — операция, сопоставляющая одной функции вещественной переменной другую функцию вещественной переменной. Эта новая функция описывает коэффициенты («амплитуды») при разложении исходной функции на элементарные составляющие — гармонические колебания с разными частотами (подобно тому, как музыкальный аккорд может быть выражен в виде суммы музыкальных звуков, которые его составляют).
Преобразование Фурье функции f вещественной переменной является интегральным и задаётся следующей формулой:
Интеграл Фурье Интеграл Фурье — это представление непериодической функции f(x) в виде интеграла, равного непрерывной сумме гармоник, зависящих от частоты ω на интервале [0, ∞ ). При этом непериодическая функция f(x) имеет непрерывный спектр; частоты образующих её гармоник изменяются непрерывно. Функции A(ω ) и B(ω ) дают закон распределения амплитуд (и начальных фаз) в зависимости от частоты ω.
5.Прямое и обратное преобразование Лапласа Преобразования Лапласа играют очень важную роль при исследовании систем, описываемых дифференциальными уравнениями. С помощью прямого преобразования Лапласа можно перейти от дифференциальных уравнений к алгебраическим, решить их в алгебраической форме, а затем с помощью обратного преобразования получить искомый результат. Прямое преобразование Лапласа осуществляется по формуле:
где На функцию x(t) накладываются некоторые ограничения. Иногда для простоты пользуются символической записью выражения (1) в виде:
где L - оператор прямого преобразования Лапласа. Функция x(t) называется оригиналом, а Х(р) - изображением. Кроме прямого существует также и обратное преобразование Лапласа, определяемое по формуле:
где интеграл берется на комплексной плоскости р вдоль любой прямой
Методы соединения звеньев В САУ существует три способа соединения звеньев: последовательное, параллельное и с обратной связью (ОС).
Рис. 2.19
Последовательное соединение изображено на рис. 2.19. При последовательном соединении звеньев выходной сигнал предыдущего звена является входным сигналом для последующего звена, а результирующая передаточная функция равна произведению передаточных функций отдельных звеньев. W(р)=W1(р)W2(р)*...*Wn(P)= При параллельном соединении (рис. 2.20) на вход всех звеньев подается общий сигнал, а на выходе образуется сигнал, являющийся суммой выходных сигналов звеньев.
Рис. 2.20
Результирующая передаточная функция является суммой передаточных функций звеньев. W(р)=W1(р)+W2(р)+...+Wn(P)=
При соединении с ОС выходной сигнал первого звена является входным для второго, причем входной сигнал первого звена образуется в результате сложения или вычитания входного сигнала и выходного сигнала второго звена.
Рис. 2.21
Передаточная функция системы при соединении с обратной связью рассчитывается по формуле:
W1(р)
где знак минус в (2.29) ставится при положительной обратной связи, а плюс - при отрицательной обратной связи. Если второе звено в цепи обратной связи отсутствует, то
W1(р)
Таким образом, имея структурную схему САУ и зная передаточные функции звеньев, можно найти передаточную функцию САУ и проводить с её помощью исследование САУ на точность, быстродействие и устойчивость.
11.Эквивалентное преобразование структурных схем Правила эквивалентных преобразований позволяют найти необходимую передаточную функцию САУ, свернув структурную схему к одному динамическому звену с искомой передаточной функцией. Рассмотрим правила эквивалентных преобразований, не изменяющих свойств систем и необходимых для нахождения передаточной функции: 1. Последовательное соединение динамических звеньев.
2. Параллельное соединение динамических звеньев.
3. Замкнутый контур с отрицательной обратной связью.
4. Замкнутый контур с положительной обратной связью.
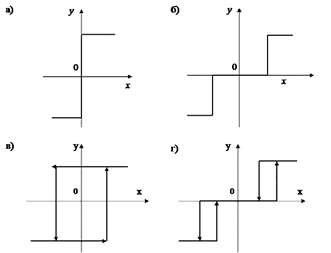
21) К нелинейным звеньям относятся следующие: 1) звено с релейной характеристикой (рисунок 1.1); 2) звено с характеристикой кусочно-линейного типа (рисунок 1.2); 3) звено с криволинейной характеристикой произвольного вида (рисунок 1.3); 4) звено, уравнение которого является нелинейным за счет входящих в это уравнение произведений переменных или их производных; 5) звено, работа которого связано с выполнением логических операций.
Рисунок 1.1 Релейные характеристики
Релейные характеристики: а) идеальные реле; б) трехпозиционные реле с зоной нечувствительности; в) двухпозиционные реле с гистерезисом; г) трехпозиционное реле с зоной нечувствительности и гистерезисом.
Рисунок 1.2 Кусочно-линейные характеристики произвольного вида
Рисунок 1.3 Криволинейные характеристики
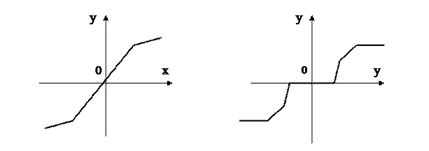
Криволинейные характеристики: а) характеристика, свойственная системам с насыщением; б) характеристика электромагнитных устройств с гистерезисом; в) характеристика выпрямителя. 22) Однозначные нелинейные характеристики: Нелинейные характеристики могут быть разделены на однозначные и неоднозначные. Рассмотрим типовые кусочно-линейные, однозначные характеристики нелинейных элементов. а) - нелинейная характеристика с насыщением; б) - нелинейная характеристика с зоной нечувствительности; в) - нелинейная характеристика с насыщением и зоной нечувствительности.
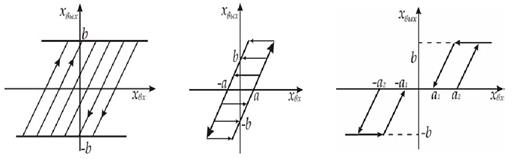
23) Неоднозначные нелинейные характеристики: Нелинейные характеристики могут быть разделены на однозначные и неоднозначные. Рассмотрим неоднозначные кусочно-линейные характеристики нелинейных элементов.
а) - нелинейная характеристика “упор” для ограничения движения; б) - нелинейная характеристика “люфт” без зоны нечувствительности; в) - нелинейная характеристика “люфт” с зоной нечувствительности.
24, 25, 26) Исследование нелинейных систем: Исследование нелинейных систем имеет следующие цели, связанные с анализом и синтезом систем: анализ устойчивости, определение возможности автоколебаний, их частоты и амплитуды, определение показателей качества, синтез устройств управления. В зависимости от конкретной цели возможно применение различных методов анализа: 1) Метод гармонической линеаризации и гармонического баланса. Нелинейный элемент (НЭ) заменятся линейным, у которого выходной сигнал У равен 1-й гармоники НЭ. Метод позволяет определить возможность автоколебаний, их частоту, амплитуду и устойчивость. 2) Метод фазовой плоскости. На плоскости строятся фазовые траектории для каждого линейного участка нелинейности, затем их соединяют. Метод позволяет определить устойчивость, наличие автоколебательных режимов, их частоту и амплитуду для систем, с достаточной точностью описываемых уравнениями 2-го порядка. 3) Метод статической линеаризации. Нелинейное звено заменяется линейным, чтобы математическое ожидание и дисперсия были одинаковы: для НЛ и для линейного звена.
27, 28, 29) Линеаризация нелинейных систем: Линеаразиция — один из наиболее распространенных методов анализа нелинейных систем. Идея линеаризации — использование линейной системы для аппроксимации поведения решений нелинейной системы в окрестности точки равновесия. Линеаризация позволяет выявить большинство качественных и особенно количественных свойств нелинейной системы. Методы линеаризации имеют ограниченный характер, то есть эквивалентность исходной нелинейной системы и ее линейного приближения сохраняется лишь для ограниченных пространственных или временных масштабов системы, или для определенных процессов, причем, если система переходит из одного режима работы в другой, то следует изменить и ее линеаризованную модель.
Предельные циклы: Если фазовая траектория x1=j1(t), x2=j2(t) — замкнутая гладкая кривая g, в некоторой окрестности которой нет других замкнутых траекторий, то она является предельным циклом: все траектории, которые начинаются достаточно близко от g, спиралевидно приближаются к ней либо при
32) Частотный критерий абсолютной устойчивости состояния равновесия Данный критерий, автором которого является В.М. Попов, непосредственно применим к одноконтурной нелинейной САР с однозначной статической характеристикой нелинейного элемента и устойчивой линейной частью ЛЧ. Класс нелинейности в данном случае определяется по принадлежности статической характеристики нелинейного элемента углу между двумя прямыми с угловыми коэффициентами k и r (k > r), т.е. по выполнению неравенства rx ≤ F(x) ≤ kx (рисунок 6.1). В частности, r может быть равно 0, как и принято в критерии Попова для 0 ≤ F(x) ≤ kx.
Рисунок 6.1 - Статические характеристики НЭ
6) Прямое и обратное преобразование Лапласа: Интегральное преобразование, связывающее функцию F(x) комплексного переменного (изображение) с функцией f(x) вещественного переменного (оригинал). С помощью преобразования Лапласа исследуются свойства динамических систем и решаются дифференциальные и интегральные уравнения. Благодаря данной операции свёртку двух функций можно свести к операции умножения, а линейные дифференциальные уравнения преобразовать в алгебраические. Прямое преобразование: Обратное преобразование:
33) Отличительная особенность преобразования нелинейных систем: Принципиальной отличительной особенностью нелинейных систем является возможность появления в системе так называемых автоколебаний, т. е. периодических сигналов с постоянной частотой и амплитудой. Автоколебания характеризуются следующими свойствами: · не вынуждаются какими-либо внешними периодическими процессами, а представляют собой собственные (свободные) движения системы; · имеют амплитуду и частоту, которые не зависят от начальных условий, а определяются исключительно параметрами системы; · возникают не при каком-то одном наборе значений параметров системы, но наблюдаются в некоторой, обычно достаточно широкой, области значений этих параметров.
Автоматические системы регулирования.Структурная схема Системы автоматического регулирования (САР) применяются для регулирования отдельных параметров (температура, давление, уровень, расход и т.д.) в объекте управления. В современных системах автоматического управления (САУ) системы автоматического регулирования являются подсистемами САУ и их применяют для регулирования различных параметров при управлении объектом или процессом. Принцип действия всякой системы автоматического регулирования (САР) заключается в том, чтобы обнаруживать отклонения регулируемых величин, характеризующих работу объекта или протекание процесса от требуемого режима и при этом воздействовать на объект или процесс так, чтобы устранять эти отклонения.
Для осуществления автоматического регулирования к регулируемому объекту подключается автоматический регулятор, вырабатывающий управляющее воздействие на регулирующий орган. Это управляющее воздействие вырабатывается регулятором в зависимости от разности между текущим значением регулируемой величины (температуры, давления, уровня жидкости и т. д.), измеряемой датчиком, и желаемым её значением, устанавливаемым задатчиком. Регулируемый объект и автоматический регулятор вместе образуют систему автоматического регулирования. Основным признаком САР, является наличие главной обратной связи, по которой регулятор контролирует значение регулируемого параметра. |
Последнее изменение этой страницы: 2019-06-19; Просмотров: 232; Нарушение авторского права страницы


 , (1)
, (1) - комплексная переменная.
- комплексная переменная. ,
,  , (2)
, (2) . Символически операцию обратного преобразования Лапласа по (2) записывают в виде:
. Символически операцию обратного преобразования Лапласа по (2) записывают в виде:  .
.
 . (2.27)
. (2.27)
 (2.28)
(2.28)
 W(р)= (2.29)
W(р)= (2.29) 1 + W1(р) W 2 (р)
1 + W1(р) W 2 (р) W(р)=. (2.30)
W(р)=. (2.30) 1 + W1(р)
1 + W1(р)


 , либо при
, либо при  .
. 


