
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Автоколебания в нелинейных системах. Устойчивость нелинейных систем.
Принципиальной отличительной особенностью нелинейных систем является возможность появления в системе так называемых автоколебаний, т. е. периодических сигналов с постоянной частотой и амплитудой. Автоколебания характеризуются следующими свойствами: · не вынуждаются какими-либо внешними периодическими процессами, а представляют собой собственные (свободные) движения системы; · имеют амплитуду и частоту, которые не зависят от начальных условий, а определяются исключительно параметрами системы; · возникают не при каком-то одном наборе значений параметров системы, но наблюдаются в некоторой, обычно достаточно широкой, области значений этих параметров. 21) К нелинейным звеньям относятся следующие: 1) звено с релейной характеристикой (рисунок 1.1); 2) звено с характеристикой кусочно-линейного типа (рисунок 1.2); 3) звено с криволинейной характеристикой произвольного вида (рисунок 1.3); 4) звено, уравнение которого является нелинейным за счет входящих в это уравнение произведений переменных или их производных; 5) звено, работа которого связано с выполнением логических операций.
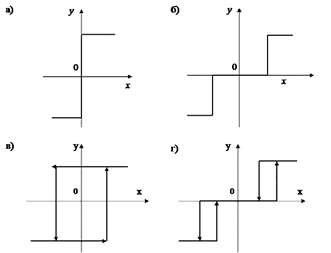
Рисунок 1.1 Релейные характеристики
Релейные характеристики: а) идеальные реле; б) трехпозиционные реле с зоной нечувствительности; в) двухпозиционные реле с гистерезисом; г) трехпозиционное реле с зоной нечувствительности и гистерезисом.
Рисунок 1.2 Кусочно-линейные характеристики произвольного вида
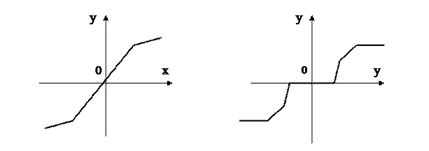
Рисунок 1.3 Криволинейные характеристики
Криволинейные характеристики: а) характеристика, свойственная системам с насыщением; б) характеристика электромагнитных устройств с гистерезисом; в) характеристика выпрямителя. 22) Однозначные нелинейные характеристики: Нелинейные характеристики могут быть разделены на однозначные и неоднозначные. Рассмотрим типовые кусочно-линейные, однозначные характеристики нелинейных элементов. а) - нелинейная характеристика с насыщением; б) - нелинейная характеристика с зоной нечувствительности; в) - нелинейная характеристика с насыщением и зоной нечувствительности.
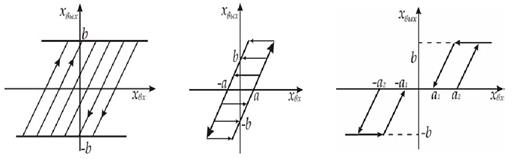
23) Неоднозначные нелинейные характеристики: Нелинейные характеристики могут быть разделены на однозначные и неоднозначные. Рассмотрим неоднозначные кусочно-линейные характеристики нелинейных элементов.
а) - нелинейная характеристика “упор” для ограничения движения; б) - нелинейная характеристика “люфт” без зоны нечувствительности; в) - нелинейная характеристика “люфт” с зоной нечувствительности.
24, 25, 26) Исследование нелинейных систем: Исследование нелинейных систем имеет следующие цели, связанные с анализом и синтезом систем: анализ устойчивости, определение возможности автоколебаний, их частоты и амплитуды, определение показателей качества, синтез устройств управления. В зависимости от конкретной цели возможно применение различных методов анализа: 1) Метод гармонической линеаризации и гармонического баланса. Нелинейный элемент (НЭ) заменятся линейным, у которого выходной сигнал У равен 1-й гармоники НЭ. Метод позволяет определить возможность автоколебаний, их частоту, амплитуду и устойчивость. 2) Метод фазовой плоскости. На плоскости строятся фазовые траектории для каждого линейного участка нелинейности, затем их соединяют. Метод позволяет определить устойчивость, наличие автоколебательных режимов, их частоту и амплитуду для систем, с достаточной точностью описываемых уравнениями 2-го порядка. 3) Метод статической линеаризации. Нелинейное звено заменяется линейным, чтобы математическое ожидание и дисперсия были одинаковы: для НЛ и для линейного звена.
27, 28, 29) Линеаризация нелинейных систем: Линеаразиция — один из наиболее распространенных методов анализа нелинейных систем. Идея линеаризации — использование линейной системы для аппроксимации поведения решений нелинейной системы в окрестности точки равновесия. Линеаризация позволяет выявить большинство качественных и особенно количественных свойств нелинейной системы. Методы линеаризации имеют ограниченный характер, то есть эквивалентность исходной нелинейной системы и ее линейного приближения сохраняется лишь для ограниченных пространственных или временных масштабов системы, или для определенных процессов, причем, если система переходит из одного режима работы в другой, то следует изменить и ее линеаризованную модель.
Предельные циклы: Если фазовая траектория x1=j1(t), x2=j2(t) — замкнутая гладкая кривая g, в некоторой окрестности которой нет других замкнутых траекторий, то она является предельным циклом: все траектории, которые начинаются достаточно близко от g, спиралевидно приближаются к ней либо при
|
Последнее изменение этой страницы: 2019-06-19; Просмотров: 390; Нарушение авторского права страницы


 , либо при
, либо при  .
. 