|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Теория радиолокационных систем. Радиолокационные системы ВС и АП.Стр 1 из 14Следующая ⇒
Теория радиолокационных систем. Радиолокационные системы ВС и АП. Теоретическая часть 1. Самолетные РЛС. Назначение, решаемые задачи. Информация, извлекаемая при обработке радиолокационного сигнала. Тактико-технические характеристики. Типовая структурная схема. Роль БРЛС в обеспечении безопасности полетов. 2. Самолетные РЛС. Назначение, решаемые задачи. Методы измерения дальности. Разрешающая способность РЛС по дальности. Типовые структурные схемы. Роль БРЛС в обеспечении безопасности полетов. 3. Самолетные РЛС. Назначение, решаемые задачи. Методы измерения угловых координат. Разрешающая способность РЛС по углу. Типовые структурные схемы. Роль БРЛС в обеспечении безопасности полетов. 4. Самолетные РЛС. Назначение, решаемые задачи. Методы измерения угловых координат. Разрешающая способность РЛС по углу. Типовые структурные схемы. Роль БРЛС в обеспечении безопасности полетов. 5. Наземные обзорные РЛС. Назначение, решаемые задачи. Методы измерения скорости цели. Разрешающая способность РЛС по скорости. Типовые структурные схемы. Роль РЛС в обеспечении безопасности полетов. 6. Наземные обзорные РЛС. Назначение, решаемые задачи. Методы оптимальной обработке импульсов с ЛЧМ и прямоугольной огибающей. Типовые структурные схемы. Роль РЛС в обеспечении безопасности полетов. 7. Наземные обзорные РЛС. Назначение, решаемые задачи. Методы обнаружения импульсных сигналов. Критерии обнаружения, схема, принцип действия. Роль РЛС в обеспечении безопасности полетов. 8. Самолетные РЛС. Назначение, решаемые задачи. Основной индикаторный блок с пультом управления. Упрощенная схема устройства развертки. Роль РЛС в обеспечении безопасности полетов. 9. Самолетные РЛС. Назначение, решаемые задачи. СВЧ – тракт. Назначение, состав, принцип действия. Роль РЛС в обеспечении безопасности полетов. 10. Самолетные РЛС. Назначение, решаемые задачи. Режимы работы радиолокатора " Гроза": " Земля", " Метео", " Контур". Роль РЛС в обеспечении безопасности полетов. 11. Самолетные РЛС. Назначение, решаемые задачи. Режимы работы радиолокатора " Гроза": " Готов", " Коррекция", " Снос". Роль РЛС в обеспечении безопасности полетов. 12. Самолетные РЛС. Назначение, решаемые задачи. Требования, состав и назначение основных узлов передатчика. Роль РЛС в обеспечении безопасности полетов. Самолетные РЛС. Назначение, решаемые задачи. Требования, состав и назначение основных узлов приемника. Роль РЛС в обеспечении безопасности полетов. 13. Системы вторичной радиолокации для УВД. Назначение, решаемые задачи. Структура запросных и ответных кодов УВД. Тактико-технические характеристики. Роль ВРЛ в обеспечении безопасности полетов. 14. Системы вторичной радиолокации для УВД. Назначение, решаемые задачи. Структура запросных и ответных кодов RBS. Тактико-технические характеристики. Роль ВРЛ в обеспечении безопасности полетов. 15. Самолетные ответчики. Назначение, решаемые задачи. Типовая структурная схема, принцип действия. Тактико-технические характеристики. Роль СО в обеспечении безопасности полетов. 16. Системы вторичной радиолокации для УВД. Назначение, решаемые задачи. Система подавления боковых лепестков в системах вторичной радиолокации. Двухимпульсная система по запросу. Типовая структурная схема, принцип действия. Роль ВРЛ в обеспечении безопасности полетов. 17. Системы вторичной радиолокации для УВД. Назначение, решаемые задачи. Система подавления боковых лепестков в системах вторичной радиолокации. Трехимпульсная система по запросу. Типовая структурная схема, принцип действия. Роль ВРЛ в обеспечении безопасности полетов. 18. Системы вторичной радиолокации для УВД. Назначение, решаемые задачи. Система подавления боковых лепестков в системах вторичной радиолокации. Система подавления по ответу. Типовая структурная схема, принцип действия. Роль ВРЛ в обеспечении безопасности полетов. 19. Радиолокационные системы предупреждения столкновения. Назначение, состав, принцип действия. Тактико-технические характеристики. Типовая структурная схема. Роль ВРЛ в обеспечении безопасности полетов. 20. Аэродромный обзорный радиолокатор. Назначение, решаемые задачи. Тактико-технические характеристики. Типовая структурная схема. Роль АОРЛ в обеспечении безопасности полетов. 21. Трассовый радиолокационный комплекс. Назначение, решаемые задачи. Тактико-технические характеристики. Типовая структурная схема. Роль ТРЛК в обеспечении безопасности полетов. 22. Посадочная РЛС. Назначение, решаемые задачи. Тактико-технические характеристики. Типовая структурная схема. Роль ПРЛС в обеспечении безопасности полетов.
Практическая часть
1. МНРЛС «Гроза». Подготовка к работе, включение, контроль питающих напряжений. 2. МНРЛС «Гроза». Функционирование в режиме «Снос». 3. СО-64. Подготовка к работе, включение, проверка в режиме «Самоконтроль». 4. СО-64. Проверка по прибору КАСО 1: проверка частоты ответного сигнала. 5. СО-64. Проверка по прибору КАСО 1: проверка правильности ответных кодов в режиме «РСП». 6. СО-64. Проверка по прибору КАСО 1: проверка соответствия кода номера, установленному на блоке шифратора. 7. СО-64. Проверка по прибору КАСО 1: проверка информации о высоте по контрольным точкам. 8. СО-70. Проверка по прибору КАСО: проверка соответствия кода номера, установленному на блоке шифратора. 9. СО-70. Проверка по прибору КАСО: проверка информации о высоте по контрольным точкам.
Теоретическая часть ВОПРОС 1.Самолетные РЛС. Назначение, решаемые задачи. Информация, извлекаемая при обработке радиолокационного сигнала. Тактико-технические характеристики. Типовая структурная схема. Роль БРЛС в обеспечении безопасности полетов.
в руководящим документе ИКАО предписано что на всех ВС должн быть установлен метео-навигационный локатор.
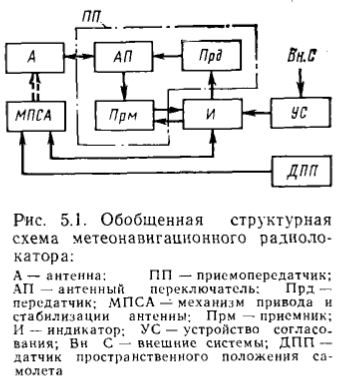
Назначение – обнаружение находящихся в передней полусфере ВС опасных для полета зон активной грозовой деятельности и мощной кучевой облачности с повышенной турбулентностью и определение их полярных координат (азимута и дальности); получение радиолокационной карты земной поверхности перед ВС для облегчения ориентации экипажа по характерным наземным ориентирам; обнаружение горных массивов и отдельных горных вершин и определение достаточного для безопасного полета превышения ВС над ними; измерение угла сноса ВС при полете над сушей. Указанная информация выдается экипажу ВС на визуальном индикаторе. Главная задача решаемая РЛС что главная функция МНРЛ должна заключаться в обнаружении и определении координат гидро-метеообразований Формула извлекаемая информация!!!!!!! Информация извлекаемая из радиолокационного сигнала
Um - информация сигнала(амплитуда) W 0- несущая частота
Um – что за цель
По диаграмме направленности определяют-------, по ее наплавлению
ВОПРОС 4. Самолетные РЛС. Назначение, решаемые задачи. Методы измерения угловых координат. Разрешающая способность РЛС по углу. Типовые структурные схемы. Роль БРЛС в обеспечении безопасности полетов.
Руководящими документами ICAO предписано наличие на борту ВС метеонавигационной радиолокационной станции. Назначение — обнаружение находящихся в передней полусфере ЛА опасных для полета зон активной грозовой деятельности и мощной кучевой облачности с повышенной турбулентностью и определение их полярных координат (азимута и дальности); получение радиолокационной карты земной поверхности перед ЛА для облегчения ориентации экипажа по характерным наземным ориентирам; обнаружение горных массивов и отдельных горных вершин и определение достаточного для безопасного полета превышения ЛА над ними; измерение угла сноса ЛА при полете над сушей. Указанная информация выдается экипажу ЛА на визуальном индикаторе. Задачи: 13) получение информации о навигационных параметрах полета (высоте, путевой скорости, угле сноса); 14) получение информации о наземной навигационной обстановке ( трасса, по которой летит ВС) 15) получение информации о метеообстановке вокруг ВС (грозы, облака, туманы); 16) получение информации об опасных объектах с точки зрения столкновения (др. ВС, горы, высотные постройки, птицы); 17) получение информации о характеристиках встречных или попутных ВС (наличие, габариты и ее навигационные параметры); 18) получение информации о характеристиках подстилающей поверхности.
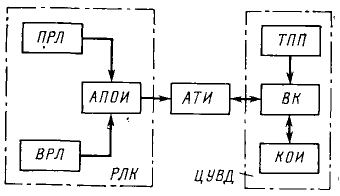
ВОПРОС 5.Наземные обзорные РЛС. Назначение, решаемые задачи. Методы измерения скорости цели. Разрешающая способность РЛС по скорости. Типовые структурные схемы. Роль РЛС в обеспечении безопасности полетов. Управление полетом современного воздушного судна (ВС) осуществляется на борту и на земле и требует разнообразной информации об условиях полета. Основными источниками этой информации являются наземные и бортовые радиоэлектронные устройства и системы, обеспечивающие полет. С помощью радиоэлектронных систем получают информацию об окружающей ВС воздушной обстановке, координатах различных объектов, метеообразованиях, траекториях полетов, а также командную информацию. Основным методом получения информации об удаленных объектах является облучение объекта зондирующим сигналом и прием отраженного сигнала (активная радиолокация). Радиолокационные системы (РЛС) – это технические средства получения информации об удаленных объектах путем приема отраженной электромагнитной энергии. Они предназначены для решения следующих задач: – измерения координат ВС; – определения высоты полета, путевой скорости, угла сноса; – обнаружения на маршруте встречных ВС и препятствий, метеообразований. Назначение АС УВД — повышение эффективности использования воздушного пространства, т. е. увеличение его пропускной способности при заданном уровне безопасности полетов ВС, сокращение эксплуатационных расходов в результате повышения производительности системы, и снижение нагрузки на диспетчеров при растущей интенсивности полетов. Данные системы обеспечивают автоматизированный сбор и обработку информации, необходимой для оптимизации процессов УВД. Состав АС УВД (рис.1) складывается из оборудования центра управления ЦУВД и территориально разнесенных источников информации о планируемой и текущей обстановке. Согласно рекомендациям ICAO в качестве основного источника информации о текущей обстановке в таких системах должны использоваться первичные и вторичные обзорные радиолокаторы. Первичный ПРЛ и вторичный ВРЛ радиолокаторы совместно с аппаратурой первичной обработки информации АПОИ составляют радиолокационный комплекс РЛК, связанный с ЦУВД через аппаратуру трансляции информации АТИ. В состав оборудования ЦУВД входят вычислительный комплекс ВК, комплекс отображения информации КОИ и устройства ввода текущих планов полета ТПП. Радиолокаторы снабжают ЦУВД информацией о дальности, азимуте и опознавательном индексе ВС, а также дополнительной информацией, необходимой для УВД. Их располагают на радиолокационных позициях, которые могут быть удалены от остальных элементов системы, расположенных в центре УВД, на расстояние нескольких десятков километров. АПОИ выполняет функции обнаружения целей и выделения радиолокационных сигналов на фоне помех, измерения координат ЛА и преобразования полученной информации в вид (цифровой код), удобный для трансляции на вычислительный комплекс АС УВД или на контрольно-диспетчерский пункт КДП. АТИ предназначена для передачи радиолокационных данных с территориально разобщенных РЛК на ВК, распределения этой информации, а также для осуществления телефонной связи, связи с ЛА и т. п. ВК состоит из ЦВМ, с помощью которых выполняют обработку планов полетов и вторичную обработку радиолокационной информации. В результате вторичной обработки определяют траекторию движения ВС, вектор его скорости и упрежденное местоположение, а также привязку дополнительной информации, получаемой от РЛК к координатам ВС. В этом же комплексе осуществляется третичная обработка информации, получаемой от территориально разнесенных радиолокаторов. В процессе этой обработки сигналы всех радиолокаторов приводятся к единой системе координат и единой системе времени и создается объединенное (синтезированное) изображение радиолокационной обстановки в контролируемой зоне воздушного пространства.
Рис.1Структурная схема автоматизированной системы УВД.
Комплекс отображения информации состоит из индикаторных устройств, устанавливаемых на рабочих местах диспетчеров. В крупных АС УВД информация отображается, как правило, в цифровой форме, в менее сложных информация о координатах ЛА — обычно в аналоговой форме, а дополнительная информация — в цифровой
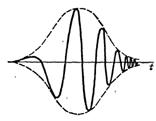
Воздушное пространство СССР разделено на районы трассовых и внетрас-совых полетов и районы аэродромов (для полетов по воздушным коридорам и в зонах взлета и посадки ЛА). Количество выполняемых функций и структурная сложность АС УВД зависят от размеров контролируемого ВП и интенсивности воздушного движения, поэтому АС УВД обычно привязывают к определенным зонам ВП. ВП разделяют на следующие зоны: А — зона с неизменной, как правило, высотой полета (радиус до 500 км, максимальная высота до 18 ООО м); Б — зона с изменяющейся (в основном) высотой полета (радиус 100—170 км); В — зона предпосадочного маневрирования (радиус 40 км, переходной эшелон 1200—1500 м); Г — посадочная прямая (удаление от начала взлетно-посадочной полосы 18—20 км); Д — зона руления. ВОПРОС 6. Наземные обзорные РЛС. Назначение, решаемые задачи. Методы оптимальной обработке импульсов с ЛЧМ и прямоугольной огибающей. Типовые структурные схемы. Роль РЛС в обеспечении безопасности полетов. Назначение ОРЛ — обнаружение и определение дальности и азимута ЛА в зоне действия радиолокатора, а также получение дополнительной информации с борта ЛА для служб УВД. В соответствии с решаемыми задачами и принятой терминологией различают первичные и вторичные ОРЛ. Наземные радиоэлектронные системы включают в свой состав радиолокаторы трассовые (ТРЛ), аэродромные (АРЛ), посадочные (ПРЛ), вторичные ВРЛ, метео-навигационные (МРЛ), обзора летного ноля (ОЛП), радиосистемы ближней навигации (РСБН), дальней навигации (РСДН), аппаратуру радиопосадки (РСП), автоматические радиопеленгаторы (АПР), радиомаяки (РМ), системы передачи данных и трансляции радиолокационного изображения, средства технического обслуживания и ремонта радиоэлектронного оборудования (РЭО). Первичные ОРЛ позволяют обнаружить и определить наклонную дальность и азимут ЛА методом активной радиолокации, используя отраженные от них сигналы радиолокатора, работают в импульсном режиме с высокой (100—1000) скважностью. Круговой обзор контролируемого пространства проводится вращающейся антенной с острой ДН в горизонтальной плоскости. Вторичные ОРЛ служат для определения наклонной дальности и азимута ЛА, а также для получения с ЛА дополнительной информации (бортовой номер, высота полета, остаток топлива и др.) для служб УВД методом активной радиолокации с активным ответом, используя сигнал бортового ответчика, генерируемый каждый раз, когда ответчик принимает сигнал запроса наземного радиолокатора. Вторичные ОРЛ отличаются, в основном, только дальностью действия, составляющей для ТРЛ — 400, а для АРЛ — 100 км. Вторичные ОРЛ, применяемые в СССР и странах СЭВ, излучают сигналы запроса на частотах 835; 837, 5; 840 и 1030 МГц и принимают сигналы ответа на частотах 730; 740; 750 и 1090 МГц. Частоты 1030 и 1090 МГц соответствуют международным нормам IСАО и являются обязательными. Остальные частоты используют в зависимости от конкретных требований к данному радиолокатору. Задачи: РЛС контролируют полет ЛА относительно наземных ориентиров на трассе, в зоне аэродрома, при заходе на посадку, предоставляют диспетчеру, управляющему полетом, необходимую информацию, включая данные о бортовом номере, высоте полета и остатке топлива на борту. Оптимальная обработка импульсов с линейной частотной модуляцией. Выше уже говорилось, что для обеспечения большой дальности РЛС требуются импульсы большой длительности. Для получения же высокой разрешающей способности по дальности выходной сигнал СФ, т, е. автокорреляционная функция сигнала, должен иметь малую длительность. Это соответствует большей ширине спектра на выходе СФ. Учитывая, что АЧХ СФ и спектра сигнала совпадают, ширина спектра на входе СФ должна быть ненамного шире, чем на его выходе, т.е. практически того же порядка. Обеспечение такой ширины спектра без снижения дальности РЛС возможно, если в импульсах достаточно большой длительности производить частотную (или фазовую) модуляцию несущей частоты. Рассмотрим СФ для импульсов с линейной частотной модуляцией (ЛЧМ), в котором для упрощения выкладок форма огибающей принята колоколообразной.
Рис. 4. Колоколообразный импульс с ЛЧМ. Согласованный фильтр (СФ) для рассматриваемого импульса имеет частотную характеристику, комплексно-сопряженную со спектром полезного сигнала. В данном случае при оптимальной фильтрации импульсов с ЛЧМ особое значение имеет согласование фазовых характеристик. Поэтому для простоты можно принять амплитудно-частотную характеристику СФ равномерной, а его фазочастотную характеристику согласованной с фазовым спектром сигнала. Ширина спектра импульса с ЛЧМ мало отличается от величины девиации частоты. При этом его гармонические составляющие имеют различные фазы. После прохождения импульса через фильтр все гармонические составляющие становятся в определенный момент времени синфазными и суммируются арифметически. Так как таких составляющих много (большая ширина спектра), то синфазное суммирование приводит к увеличению пикового значения, а в силу закона сохранения энергии — к такому же уменьшению длительности, т. е, сужению импульса.
коэффициент сжатия равен произведению девиации частоты на длительность, т. е. базе сигнала, что является достаточно общим правилом (например, для импульсов с прямоугольной огибающей и др.). Следовательно, при оптимальной обработке импульса с ЛЧМ получается эффект сжатия: при наличии достаточной энергии зондирующего импульса, имеющего большую длительность, сохраняется высокая разрешающая способность по дальности. Заметим, что так как дальность при оптимальной обработке зависит от энергии импульса, то сжатие не дает никакого выигрыша в дальности. Понятие об оптимальной обработке импульсов с ЛЧМ и прямоугольной огибающей. Анализ спектра такого импульса длительностью tи и девиацией частоты Dfм показывает, что по мере увеличения произведения tиDfм спектр импульса делается все более равномерным. Например, при tиDfм=10 в полосе частот от f0-Dfм/2 до f0+Dfм/2 (где f0 – средняя частота импульса) сосредоточено 95% всей энергии сигнала. Такой же вид имеет частотная характеристика СФ, а следовательно, спектр на его выходе. Равномерный спектр со спектральной плотностью S0 в указанной полосе соответствует сигналу:
С помощью замены переменной w1=w-2pf0 получим:
Таким образом импульс на выходе СФ имеет несущую частоту f0 и огибающую вида sinx/x. Длительность главного лепестка на уровне 0, 7 равна:
т. е. происходит сжатие в m=tи/tсж=tиDfм раз. Однако сжатый импульс имеет боковые лепестки, которые нежелательны, так как ухудшают разрешающую способность и создают дополнительные помехи. Для уменьшения боковых лепестков надо вместо идеального фильтра использовать фильтр с резко спадающей, но плавной (например, колоколообразной) АЧХ. Для уменьшения боковых лепестков уже после сжатия можно применить весовую обработку — пропускание сжатого импульса через фильтр со специально подобранной характеристикой. Уменьшение боковых лепестков сопровождается некоторым расширением главного лепестка. Описанная задача полностью аналогична задаче ослабления боковых лепестков в антенне.
Особое место в безопасности полетов занимают радиолокационные системы (РЛС), поскольку они являются основным источником оперативной информации о метеорологической обстановке, обеспечивают получение необходимой для УВД оперативной информации о местоположении ВС в любой момент времени независимо от метеорологических условий. РЛС контролируют полет ЛА относительно наземных ориентиров на трассе, в зоне аэродрома, при заходе на посадку, предоставляют диспетчеру, управляющему полетом, необходимую информацию, включая данные о бортовом номере, высоте полета и остатке топлива на борту, что обеспечивает способность выполнять полеты без угрозы для жизни и здоровья людей.
Критерий Неймона-Пирсона: «Порог определяется таким образом, что при заданном значении вероятности ложной тревоги необходимо обеспечить максимальное значение вероятности правильного обнаружения». Особое место в безопасности полетов занимают радиолокационные системы (РЛС), поскольку они являются основным источником оперативной информации о метеорологической обстановке, обеспечивают получение необходимой для УВД оперативной информации о местоположении ВС в любой момент времени независимо от метеорологических условий. РЛС контролируют полет ЛА относительно наземных ориентиров на трассе, в зоне аэродрома, при заходе на посадку, предоставляют диспетчеру, управляющему полетом, необходимую информацию, включая данные о бортовом номере, высоте полета и остатке топлива на борту, что обеспечивает способность выполнять полеты без угрозы для жизни и здоровья людей.
Литература Основы радиолокации (Финкельштейн М. И.) - 1983 г. Стр. 205-217
ВОПРОС 12.Самолетные РЛС. Назначение, решаемые задачи. Требования, состав и назначение основных узлов передатчика. Роль РЛС в обеспечении безопасности полетов. Самолетные РЛС. Назначение, решаемые задачи. Требования, состав и назначение основных узлов приемника. Роль РЛС в обеспечении безопасности полетов. (Справочник Давыдов: стр.141; Радиолокационные системы ВС Давыдова стр.12, 38 и 90 – основное) Руководящими документами ИКАО предусмотрено обязательное наличие МНРЛС на борту всех воздушных судов выполняющих коммерческие рейсы. Назначение: 1) определение местоположения ВС в пространстве, 2) определение скорости ВС, 3) определение окружающей обстановки и характеристик земной (подстилающей) поверхности. Задачи: 19) получение информации о навигационных параметрах полета (высоте, путевой скорости, угле сноса); 20) получение информации о наземной навигационной обстановке ( трасса, по которой летит ВС) 21) получение информации о метеообстановке вокруг ВС (грозы, облака, туманы); 22) получение информации об опасных объектах с точки зрения столкновения (др. ВС, горы, высотные постройки, птицы); 23) получение информации о характеристиках встречных или попутных ВС (наличие, габариты и ее навигационные параметры); 24) получение информации о характеристиках подстилающей поверхности. Передающий тракт любой РЛС состоит из передающего устройства фидерной системы и антенны. Радиопередающее устройство предназначено для формирования зондирующих сигналов путем преобразования энергии источников питания в энергию высокочастотных (ВЧ) колебаний и управления параметрами этих колебаний. Для этого в состав передающего устройства обычно включают источник питания, модулятор (управляющее устройство) и генератор. Источник питания обеспечивает подачу энергии в виде переменного или постоянного тока. Во втором случае источник питания выполняется в виде высоковольтного выпрямителя. Оба типа источников нашли применение в бортовых РЛС. Модулятор осуществляет управление параметрами огибающей ВЧ сигнала. Генератор вырабатывает мощный ВЧ сигнал, параметры которого определяются управляющими сигналами модулятора. По виду генераторного прибора в выходном каскаде передающие устройства подразделяются на ламповые, магнетронные, клистронные, амплитронные и т. п. В бортовых РЛС наибольшее применение нашли первых два вида.
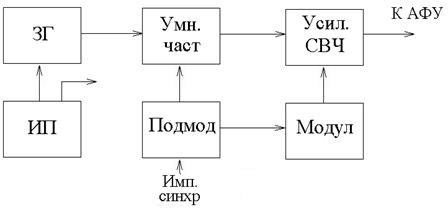
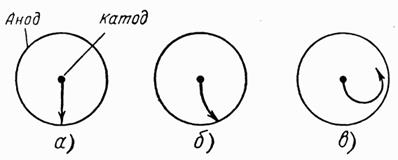
По диапазону генерируемых частот передатчики бортовых РЛС можно разделить на следующие группы: дециметрового (300...3000 МГц), сантиметрового (3000... 30000 МГц) и миллиметрового (30000…300000 МГц) диапазонов волн. В зависимости от целевого назначения построение генераторной части передающего устройства может быть одно-или многокаскадным. Однокаскадные генераторы работают в автоколебательном режиме. Энергия ВЧ колебаний передается непосредственно от мощного генератора в антенно-фидерную систему. Многокаскадные генераторы работают в режимах умножения частоты и усиления колебаний с внешним возбуждением (рис. 1). В качестве возбудителя используется сравнительно маломощный высокостабильный генератор, генерируемые колебания которого умножаются по частоте и усиливаются в последующих каскадах до требуемых значений. Многокаскадные генераторы более стабильны и могут развивать большую среднюю мощность. Однако мощные однокаскадные генераторы находят применение в случаях, когда определяющую роль играют малые габариты, а не стабильность частоты и мощность передающего устройства. К основным техническим данным радиопередающих устройств следует отнести: · импульсную мощность, под которой понимают мощность, передаваемую в нагрузку в течение длительности импульса, · среднюю мощность, вырабатываемую ВЧ генератором за период повторения импульсов (современное радиолокационное оборудование ВС имеет передающие устройства, генерирующие мощность от десятых долей ватта до сотен киловатт); · к. п. д. передающего устройства, определяемый в основном отношением отдаваемой мощности в АФС ко всей потребляемой (кпд передатчиков РЛС обычно составляет 0, 05...0, 25); · частоту или диапазон генерируемых частот, определяемый решаемыми задачами РЛС; · стабильность частоты генерируемых колебаний; · длительность и период повторения импульсов. Уход частоты генерируемых колебаний от номинального значения обусловлен воздействием дестабилизирующих факторов (нестабильность питающих напряжений, изменения степени согласования в тракте генератор — антенна, изменение давления, температуры, влажности и ряда других причин). Стабильность длительности и периода повторения импульсов определяется техническими и схемными решениями при проектировании передающего устройства (выбор типа модулятора, защита от помех и т. д.). Генерация импульсных сигналов СВЧ. В подавляющем большинстве бортовых метеонавигационных РЛС (МН РЛС) для генерации импульсных сигналов СВЧ используются однокаскадные передающие устройства с мощным автогенератором на базе многорезонаторного магнетрона. Магнетрон представляет собой электровакуумный прибор (цилиндрический диод), относящийся к группе устройств, работающих со скрещенными полями. Колебательная система выполнена в виде взаимосвязанных, объемных резонаторов, образующих анодный блок. Между анодом и катодом действуют два поля: электрическое поле и перпендикулярное ему магнитное поле наружного постоянного магнита. Под действием этих полей эмитируемые катодом электроны, попадая в пространство взаимодействия (кольцевое пространство между катодом и анодным блоком), совершают сложное эпициклоидальное движение (рис. 2).
Рис. 2. Траектории электронов в магнетроне. а — при отсутствии магнитного поля; б — при малом поле; в — при сильном поле. Конструирование магнетронов Основными конструктивными узлами современных магнетронов являются: · анодный блок (корпус) магнетрона, включающий резонаторную · система перестройки частоты; · вывод энергии; · катод с соответствующими выводами; · вакуумная оболочка и система охлаждения; · магнитная цепь. Основное назначение современных импульсных магнетронных генераторов — передатчики радиолокационных станций и других радиотехнических устройств, в том числе линий импульсной связи, радиоотелеметрических систем, маяков и т. п. Модуляторы передатчиков импульсных РЛС ВС. В импульсных РЛС модуляторы формируют короткие высоковольтные импульсы, управляющие работой магнетронного СВЧ генератора, а также вспомогательные старт-сигналы для запуска других узлов РЛС и сигналы бланкирования других бортовых радиотехнических устройств. Модулятор может состоять из подмодулятора и собственно модулятора. Первый формирует импульс по длительности и форме, второй по мощности. Работа любого модулятора в импульсной РЛС основана на принципе сравнительно продолжительного процесса накопления энергии накопителем и кратковременного ее использования в нагрузке. Обычно в качестве накопительных элементов используются конденсаторы или формирующие линии, поскольку они обеспечивают выработку управляющих импульсов, близких по форме к прямоугольным, что необходимо для стабильной работы магнетрона. К форме модулирующего импульса предъявляются следующие требования: · спад вершины импульса должен быть не более 0, 05 Umax за время его длительности; · длительность фронта tф, должна составлять не более 0, 1 его длительности tф< 0, 1 tи; · длительность среза tс не более (0, 2, ... 0, 25) tи; Длительность формируемых модулятором импульсов в бортовых РЛС в большинстве случаев составляет десятые доли или единицы микросекунд. Приемник. Супергетеродинные приемники обеспечивают наибольшие чувствительность и избирательность по сравнению с другими типами приемников: детекторными, прямого усиления и сверхрегенеративными. Поэтому почти все приемники РЛС строятся по супергетеродинной схеме. Современные радиолокационные приемники отличаются большим разнообразием схем и в ряде случаев большой сложностью, что обусловлено широким кругом задач, решаемых с помощью РЛС, и разновидностями их принципов построения. В супергетеродинном приемнике основное усиление принимаемого сигнала до необходимого уровня производится в УПЧ. Поэтому наиболее важная задача СВЧУ сводится, в сущности, к тому, чтобы преобразовать принятый СВЧ сигнал в сигнал промежуточной частоты. Однако поскольку СВЧУ является входным устройством приемника (первым каскадом), то его коэффициент шума почти полностью определяет общий коэффициент шума и тем самым чувствительность приемника. При этом предполагается, что полоса пропускания Dfпч выбрана на основе исходных данных и, следовательно, однозначно определена. Поэтому для достижения максимальной чувствительности указанный процесс преобразования частоты сигнала должен происходить с минимальным ухудшением отношения сигнал/шум на выходе преобразователя по сравнению с его величиной на входе приемника, т. е. схема СВЧУ должна обеспечивать минимальный коэффициент шума. Рассмотрим назначение отдельных элементов СВЧУ (рис. 1). В импульсных РЛС для излучения мощных импульсов передатчика и приема слабых отраженных от цели сигналов используется одна и та же антенна. Для осуществления такого режима работы используется антенный переключатель (АП) с устройством защиты приемника. На время излучения импульса передатчика АП подключает антенну к фидерному тракту передатчика и запирает вход приемника, при этом мощный СВЧ импульс поступает в антенну без значительного ослабления, а затухание между антенным трактом и входом приемника (в данном случае – вход малошумящего усилителя) становится очень большим. Тем не менее часть мощности передатчика просачивается из передающего тракта (тракта высокого уровня мощности) на вход приемника, а устройство защиты приемника ослабляет эту мощность до безопасного для приемника уровня. Такая защита особенно важна тогда, когда входным каскадом приемника является малошумящий усилитель (МШУ) или смеситель на полупроводниковых диодах, поскольку последние могут ухудшить свои параметры или даже полностью выгореть под воздействием импульсной мощности в несколько сот милливатт. В зависимости от выбранной схемы АП функции устройства защиты выполняются либо элементами самого АП, либо от него не зависящими специальными элементами. После окончания импульса передатчика АП автоматически и с минимальной задержкой (порядка единиц микросекунд) переключает антенну с передачи на прием, т. е. обеспечивает прохождение принятого антенной слабого сигнала без значительного ослабления на вход приемника и исключает потери мощности этого сигнала на ответвление в тракт передатчика. Поочередное подключение антенны к передающему и приемному трактам производится антенным переключателем синхронно с импульсной работой передатчика. Принятый импульсный сигнал Рс, отраженный от цели, поступает в МШУ, предназначенный для предварительного усиления Рс, и через устройство подавления зеркального канала приема (назначение которого будет рассмотрено ниже) попадает в смеситель, в котором и происходит преобразование СВЧ сигнала Рс в импульсный сигнал промежуточной частоты Рспч. Для получения такого преобразования к смесителю подводится часть мощности непрерывных колебаний гетеродина, частота которых fг отличается от fс на величину промежуточной частоты fпч, т. е. fг=fс±fпч. Уровень подводимой мощности гетеродина во много раз (на 5—10 порядков) превосходит мощность преобразуемого сигнала Рс (отличие уровней мощности сигналов в различных элементах СВЧУ качественно показано на рис. 1 разной толщиной соединительных стрелок и разной высотой условных изображений импульсных радиоколебаний и шумов). Коэффициент шума смесителей см и мм волн имеет довольно значительную величину и возрастает по мере укорочения рабочей длины волны (от 5-7 дБ на длинных см волнах и до 20 дБ на коротких мм волнах). Для снижения коэффициента шума СВЧУ и, следовательно, всего приемника используется МШУ, коэффициент шума которого, как правило, существенно ниже, чем у смесителя, а коэффициент усиления достаточно большой (порядка 15 – 20 дБ). На рис. 1 условно показано, как в результате усиления уровни сигнала и шума на выходе МШУ возрастают (при этом отношение Рс/Рш на выходе, как это следует из (рис. 1), становится меньше, чем на входе МШУ, из-за добавления собственных шумов усилителя Ршвыхсоб). |
Последнее изменение этой страницы: 2020-02-17; Просмотров: 1074; Нарушение авторского права страницы


 -задержка
-задержка скорость движения
скорость движения

 ,
,  .
. .
. ,
,