|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Фазовый метод радиопеленгации
Этот метод основан на том, что если две приемные антенны Al, A2 разнесены на фиксированное расстояние d, называемое базой, то сдвиг фаз между напряжениями, наводимыми в антеннах, зависит от направления прихода радиоволн (рис. 3.26). Фазовый радиопеленгатор, как и амплитудный, предназначен для пеленгации источника излучения. Аналогичные задачи решает фазовый радиомаяк с двумя передающими антеннами, разнесенными на фиксированное расстояние, и одной приемной антенной на пеленгуемом объекте Обозначим угол между нормалью к базе и направлением принимаемой волны через a (рис. 3.26), тогда разность хода волн к антеннам А1, А2 равна d sina, а сдвиг фаз между наведенными в них напряжениями равен (2p/l) d sina. Эти напряжения усиливаются и ограничиваются по амплитуде в отдельных приемных каналах; один из каналов содержит фазовращатель, поворачивающий фазу усиленного напряжения на 900. С обоих каналов напряжения подаются на фазометр для измерения разности фаз
Фазометр содержит фазовый детектор и измеритель его выходного напряжения Uвых. Схема фазового детектора такова, что напряжение Uвыхпропорционально косинусу угла сдвига фаз входных напряжений детектора:
где К— коэффициент пропорциональности, учитывающий как напряжение на входе фазового детектора, так и коэффициент передачи напряжения детектора; коэффициент К поддерживается постоянным благодаря ограничителям амплитуды. Пеленгационная характеристика фазового пеленгатора (рис. 6) построена по формуле (3.37) для малых углов a, при которых sina»a:
Отсюда видно, что однозначные показания пеленгатора aодн получаются, если угол 2pad/l не выходит за пределы p (от -p/2 до +p/2), что соответствует: aодн= pl/2pd=l/2d. (4)
Рис. 5. Функциональная схема фазового радиопеленгатора. Сопоставляя выражения (2) и (4), убеждаемся, что в фазовых пеленгаторах, как и в фазовых дальномерах, имеется противоречие между точностью измерений и пределами однозначных показаний: для повышения точности нужно увеличить базу d, а для расширения однозначных измерений пеленга цели — уменьшить d. Это противоречие может быть разрешено введением дополнительной антенны A3 по схеме рис. 7 с таким расчетом, чтобы грубое, но однозначное определение пеленга осуществлялось антеннами А1, А2 с малой базой d1, а уточнение пеленга производилось с помощью антенн А1, A3, разделенных большой базой d2. Другой путь решения проблемы заключается в переходе от низких радиочастот к сверхвысоким, где можно разместить обе антенны на общем поворотном устройстве и получить диаграмму направленности с шириной, значительно меньшей диапазона измеряемых пеленгов. При этом уменьшение длины волны, как показывает (3.38), повышает пеленгационную чувствительность так же, как удлинение базы d, а перекрытие требуемого диапазона однозначно измеряемых пеленгов достигается поворотом антенной системы. Такое решение имеет еще одно преимущество: радиопеленгатор на низких радиочастотах не позволяет различать цели, охватываемые весьма широкой диаграммой направленности антенной системы, а остронаправленные антенны УКВ сообщают пеленгатору высокую потенциальную разрешающую способность по направлению:
Рис. 6. Пеленгационная характеристика фазового радиопеленгатора
Рис. 7. Расположение трех антенн для однозначного и точного измерения пеленга в широких пределах При наличии шумов потенциальная среднеквадратическая ошибка измерения угла фазовый методом
т. е. эта ошибка тем меньше, чем больше отношение сигнал/шум q и отношение базы к длине волны d / l, а также чем меньше отклоняется направление на цель от перпендикуляра к базе антенн (меньше a). Пример. Инеем a=0; d / l =10 и q = 10. Определить среднеквадратическую ошибку пеленгования фазовым методом
Фазовый метод пеленгации широко применяется в радионавигации и реже в радиолокации — только на УКВ, когда требуется повышенная точность измерения угловых координат. Безопасность полетов – комплекс взаимосвязанных организационных направлении на обеспечение безаварийной летной работы и осуществляющих контрольных и мероприятий по предупреждению авиационных происшествий и инцидентов. С помощью использования МНРЛС снижает процент авиационных происшествий и инцидентов ( обоснование в назначении ).
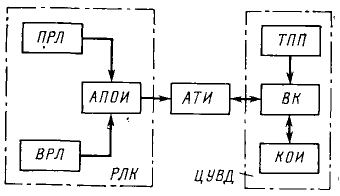
ВОПРОС 5.Наземные обзорные РЛС. Назначение, решаемые задачи. Методы измерения скорости цели. Разрешающая способность РЛС по скорости. Типовые структурные схемы. Роль РЛС в обеспечении безопасности полетов. Управление полетом современного воздушного судна (ВС) осуществляется на борту и на земле и требует разнообразной информации об условиях полета. Основными источниками этой информации являются наземные и бортовые радиоэлектронные устройства и системы, обеспечивающие полет. С помощью радиоэлектронных систем получают информацию об окружающей ВС воздушной обстановке, координатах различных объектов, метеообразованиях, траекториях полетов, а также командную информацию. Основным методом получения информации об удаленных объектах является облучение объекта зондирующим сигналом и прием отраженного сигнала (активная радиолокация). Радиолокационные системы (РЛС) – это технические средства получения информации об удаленных объектах путем приема отраженной электромагнитной энергии. Они предназначены для решения следующих задач: – измерения координат ВС; – определения высоты полета, путевой скорости, угла сноса; – обнаружения на маршруте встречных ВС и препятствий, метеообразований. Назначение АС УВД — повышение эффективности использования воздушного пространства, т. е. увеличение его пропускной способности при заданном уровне безопасности полетов ВС, сокращение эксплуатационных расходов в результате повышения производительности системы, и снижение нагрузки на диспетчеров при растущей интенсивности полетов. Данные системы обеспечивают автоматизированный сбор и обработку информации, необходимой для оптимизации процессов УВД. Состав АС УВД (рис.1) складывается из оборудования центра управления ЦУВД и территориально разнесенных источников информации о планируемой и текущей обстановке. Согласно рекомендациям ICAO в качестве основного источника информации о текущей обстановке в таких системах должны использоваться первичные и вторичные обзорные радиолокаторы. Первичный ПРЛ и вторичный ВРЛ радиолокаторы совместно с аппаратурой первичной обработки информации АПОИ составляют радиолокационный комплекс РЛК, связанный с ЦУВД через аппаратуру трансляции информации АТИ. В состав оборудования ЦУВД входят вычислительный комплекс ВК, комплекс отображения информации КОИ и устройства ввода текущих планов полета ТПП. Радиолокаторы снабжают ЦУВД информацией о дальности, азимуте и опознавательном индексе ВС, а также дополнительной информацией, необходимой для УВД. Их располагают на радиолокационных позициях, которые могут быть удалены от остальных элементов системы, расположенных в центре УВД, на расстояние нескольких десятков километров. АПОИ выполняет функции обнаружения целей и выделения радиолокационных сигналов на фоне помех, измерения координат ЛА и преобразования полученной информации в вид (цифровой код), удобный для трансляции на вычислительный комплекс АС УВД или на контрольно-диспетчерский пункт КДП. АТИ предназначена для передачи радиолокационных данных с территориально разобщенных РЛК на ВК, распределения этой информации, а также для осуществления телефонной связи, связи с ЛА и т. п. ВК состоит из ЦВМ, с помощью которых выполняют обработку планов полетов и вторичную обработку радиолокационной информации. В результате вторичной обработки определяют траекторию движения ВС, вектор его скорости и упрежденное местоположение, а также привязку дополнительной информации, получаемой от РЛК к координатам ВС. В этом же комплексе осуществляется третичная обработка информации, получаемой от территориально разнесенных радиолокаторов. В процессе этой обработки сигналы всех радиолокаторов приводятся к единой системе координат и единой системе времени и создается объединенное (синтезированное) изображение радиолокационной обстановки в контролируемой зоне воздушного пространства.
Рис.1Структурная схема автоматизированной системы УВД.
Комплекс отображения информации состоит из индикаторных устройств, устанавливаемых на рабочих местах диспетчеров. В крупных АС УВД информация отображается, как правило, в цифровой форме, в менее сложных информация о координатах ЛА — обычно в аналоговой форме, а дополнительная информация — в цифровой
Воздушное пространство СССР разделено на районы трассовых и внетрас-совых полетов и районы аэродромов (для полетов по воздушным коридорам и в зонах взлета и посадки ЛА). Количество выполняемых функций и структурная сложность АС УВД зависят от размеров контролируемого ВП и интенсивности воздушного движения, поэтому АС УВД обычно привязывают к определенным зонам ВП. ВП разделяют на следующие зоны: А — зона с неизменной, как правило, высотой полета (радиус до 500 км, максимальная высота до 18 ООО м); Б — зона с изменяющейся (в основном) высотой полета (радиус 100—170 км); В — зона предпосадочного маневрирования (радиус 40 км, переходной эшелон 1200—1500 м); Г — посадочная прямая (удаление от начала взлетно-посадочной полосы 18—20 км); Д — зона руления. |
Последнее изменение этой страницы: 2020-02-17; Просмотров: 96; Нарушение авторского права страницы
 . (1)
. (1) , (2)
, (2) . (3)
. (3)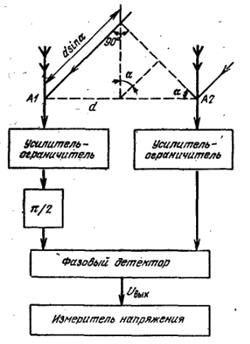




 .
.