|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
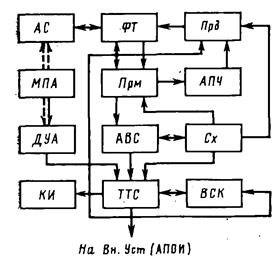
Обобщенная структурная схема первичного радиолокатора
Антенные системы большинства радиолокаторов имеют два облучателя, один из которых обеспечивает обнаружение ЛА под малыми углами места. Особенность ДН в вертикальной плоскости— резкий срез ее нижней части для уменьшения помех от местных объектов, расположенных вблизи от места установки антенной системы радиолокатора. Обычно в радиолокаторах имеется возможность изменения положения максимума ДН в вертикальной плоскости в пределах от нуля до нескольких градусов относительно горизонтальной плоскости. В антеннах предусматривают устройства для изменения поляризации излучаемых и принимаемых колебаний. Применение круговой поляризации позволяет ослабить на 15—20 дБ сигналы, отраженные от метеообразований. Отражатель антенны по форме близок к усеченному параболоиду вращения и выполнен из металлической сетки для уменьшения ветровой нагрузки. Иногда с этой же целью, а также для защиты антенных узлов от воздействия осадков антенную систему помещают под радиопрозрачный купол (обтекатель). Наличие обтекателя приводит к потерям электромагнитной энергии и некоторому снижению дальности действия радиолокатора. На отражателе антенны монтируют антенну вторичного радиолокатора или предусматривают место для нее. Антенную систему радиолокатора поднимают по возможности выше над поверхностью земли (например, устанавливают на специальной вышке) для того, чтобы окружающие антенную систему объекты не препятствовали обзору под малыми углами места. Механизм привода антенны обеспечивает равномерное ее вращение с целью кругового обзора контролируемого радиолокатором воздушного пространства. Частота вращения антенны составляет 6 об/мин в ТРЛ и 12 об/мин в АРЛ. Увеличением скорости обзора в АРЛ обусловлено необходимостью более частого обновления информации о положении ЛА в аэродромной зоне. Датчики угловых положений антенны предназначены для получения сигналов, несущих информацию о текущем положении ДН в горизонтальной плоскости. Они выдают дискретные или непрерывные сигналы, которые используются в простейшем случае для получения соответственно угловых меток и азимутальной развертки в индикаторах кругового обзора (ИКО), а в более сложных выходных устройствах —для вычисления азимута ЛА. Датчики механически связаны с осью вращения АС радиолокатора. Фидерный тракт служит для переключения антенны на излучение или прием сигналов, распределения высокочастотной энергии между облучателями антенны, потребителями и контрольно-измерительными устройствами. Передатчик предназначен для получения высокочастотных импульсов длительностью 1—3 мкс, питающих облучатели антенны. Частота, на которой работает передатчик, зависит от назначения радиолокатора. В ТРЛ для уменьшения влияния на дальность действия метеоусловий обычно используют частоты ~ 1, 3 ГГц (λ = ~ 23 см), а в АРЛ, дальность действия которых меньше, а следовательно, и меньше поглощение энергии на трассе распространения радиоволн, могут использоваться более высокие частоты, например, ~2, 8 ГГц λ = ~ 11см). Унификации высокочастотных элементов ТРЛ и АРЛ способствует применение колебаний с частотой ~ 1, 3 ГГц в обоих радиолокаторах. Для уменьшения влияния флуктуаций отраженного сигнала на вероятность его обнаружения, а также увеличения числа импульсов, отраженных от цели за один обзор, иногда применяют два передатчика, работающих одновременно на близких частотах, которые отличаются на 50 — 100 МГц. Это позволяет увеличить дальность обнаружения примерно на 25%. Длительность и частота повторения зондирующих импульсов зависят от назначения радиолокатора. В радиолокаторах с большой дальностью действия (ТРЛ) применяют импульсы длительностью ~ 3 мкс, следующие с частотой повторения 300—400 Гц, а в АРЛ — длительность импульсов может быть меньше 1 мкс при частоте повторения 1000 Гц. Мощность передатчиков составляет 0, 5—5 МВт. Устройство автоматической подстройки частоты предназначено для поддержания постоянной частоты генерируемых магнетроном колебаний с точностью, обеспечивающей нормальную работу устройства СДЦ. В качестве источника опорных колебаний в устройствах АПЧ используют стабильный местный гетеродин приемника. Точность автоподстройки составляет несколько сот килогерц. Снижения влияния автоподстройки частоты на работу устройства СДЦ достигают уменьшением скорости автоподстройки до единиц мегагерц в секунду. Приемник выполняет функции усиления и преобразования принятых сигналов, а также вырабатываемых передатчиком колебаний для обеспечения работы устройства АПЧ и фазирования когерентного гетеродина устройства СДЦ. Особенность приемников ПРЛ — наличие усилителя высокой частоты на мало- шумящих транзисторах или лампе бегущей волны (ЛБВ), позволяющего снизить коэффициент шума приемника и тем самым увеличить дальность действия радиолокатора. Средний коэффициент шума приемников 2—4 дБ, а чувствительность около 140 дБ/Вт. Приемник выполняют по супергетеродинной схеме с однократным преобразованием частоты. Промежуточная частота обычно равна 30 МГц, коэффициент усиления УПЧ не менее 25 дБ. В некоторых радиолокаторах для борьбы с флуктуациями принимаемых сигналов, отрицательно влияющими на работу СДЦ, применяют усилители с ограничением сигналов по амплитуде или с логарифмической амплитудно-частотной характеристикой. Для сужения динамического диапазона сигналов, поступающих на аппаратуру первичной обработки, в приемниках используют АРУ с дискретной или плавной регулировкой, а также ВАРУ, повышающую коэффициент усиления УПЧ на больших дальностях. Вследствие этого зависимость амплитуды выдаваемых приемником сигналов от дальности уменьшается. С выхода УПЧ сигналы идут по каналу амплитудного детектирования для получения обычного видеосигнала и по каналу фазового детектирования (т. е. по каналу СДЦ). Аппаратура выделения сигналов выполняет функцию обнаружения полезного отраженного от ЛА сигнала на фоне различных помех. Наибольшей интенсивностью обладают помехи от неподвижных наземных объектов в радиусе 35—40 км от радиолокатора. Аппаратурные средства борьбы с этими помехами включают устройства управления ДН, формирующие при соответствующей комбинации сигналов, принятых по облучателям антенной системы, «провалы» в ДН; ВАРУ, уменьшающее усиление на малых дальностях; устройства запирания приемного тракта на время приема сигналов, приходящих с указанных дальностей, и др. Эффективным средством выделения сигналов движущихся целей (ЛА) на фоне отражений от неподвижных объектов являются устройства СДЦ. Они выполняются как по простейшей аналоговой схеме череспериодного однократного вычитания, так и по более сложной и эффективной цифровой схеме с квадратурными каналами, содержащими двухкратные устройства череспериодной компенсации. Коэффициент подавления помех от неподвижных объектов в современных устройствах СДЦ достигает 40 дБ. Для борьбы со слепыми скоростями применяют смену частот повторения, позволяющую вывести первую слепую скорость за пределы диапазона возможных радиальных скоростей ЛА. Устройства СДЦ способствуют также подавлению помех от метеообразований. Однако перемещение этих образований не позволяет получить при СДЦ коэффициент подавления отраженных от них сигналов более 15 дБ. Другим средством борьбы с отражениями от метеообразований является применение круговой или эллиптической поляризации. Однако при этом уменьшается мощность полезных сигналов на б—8 дБ, а следовательно, дальность действия радиолокатора сокращается примерно на 30%. Для борьбы с помехами в ПРЛ применяют адаптивные устройства, которые определяют распределение помех в зоне действия радиолокатора и управляют ДН, коэффициентом усиления приемника и стробированием последнего в зависимости от наличия и интенсивности помехи в данном элементе разрешения радиолокатора, а также определяют области целесообразного использования СДЦ Кроме того, в ЛВС входят устройства для борьбы с несинхронными помехами. В таких устройствах используют корреляционные методы, когда достоверность сигнала определяется по совпадению временных положений импульсов, например в смежных периодах повторения. Выходными устройствами ABC являются обнаружители сигналов часто со схемами, позволяющими стабилизировать вероятность ложной тревоги на уровне ю-*. Вероятность правильного обнаружения в рассматриваемых радиолокаторах составляет 0, 8—0, 9. Кроме обработки сигналов, ABC часто выполняет функцию выделения из обрабатываемых сигналов информации о метеообразованиях и преобразования ее в двоичный код для передачи в центр УВД. Аппаратура выделения сигналов в современных первичных радиолокаторах представляет собой специализированный цифровой процессор. Синхронизатор предназначен для запуска в определенной очередности основных устройств радиолокатора: передатчика, устройства ВАРУ в приемнике, индикатора, а также для соответствующих переключений режимов радиолокатора, например смены частот повторения. Элементы синхронизатора могут входить в аппаратуру первичной обработки информации АПОИ или быть связанными с ее устройствами, что, в частности, необходимо для поддержания периода повторения равным времени задержки сигналов в устройстве СДЦ. Тракт трансляции сигналов преобразует входные сигналы ABC в форму, удобную для передачи на КДП для индикации или дальнейшей обработки в аппаратуре АПОИ в центре УВД. В простейшем случае в состав этого тракта входят сумматоры, где объединяются некоторые сигналы перед их трансляцией, и усилители сигналов, включенные на входе кабельной линии связи. В радиолокаторах, входящих в состав АС УВД, в таких устройствах информация преобразуется в цифровой код. Эти устройства могут схемно или конструктивно входить в ABC. Контрольный индикатор служит для наблюдения радиолокационного изображения при наладке и во время эксплуатации радиолокатора и является средством визуального контроля функционирования последнего. Система встроенного контроля предназначена для непрерывной автоматической проверки основных параметров радиолокатора, сигнализации об отказе отдельных его элементов и указания места отказа. В наиболее совершенных радиолокаторах встроенным контролем охвачены все элементы радиолокационного тракта, за исключением антенной системы.
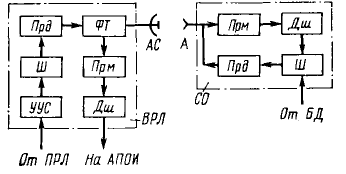
Вторичные ОРЛ служат для определения наклонной дальности и азимута ЛА а также для получения с ЛА дополнительной информации (бортовой номер, высота полета, остаток топлива и др.) для служб УВД методом активной радиолокации с активным ответом, используя сигнал бортового ответчика, генерируемый каждый раз, когда ответчик принимает сигнал запроса наземного радиолокатора. Вторичные ОРЛ отличаются, в основном, только дальностью действия, составляющей для ТРЛ — 400, а для АРЛ — 100 км. Вторичные ОРЛ, применяемые в СССР и странах СЭВ, излучают сигналы запроса на частотах 835; 837, 5; 840 и 1030 МГц и принимают сигналы ответа на частотах 730; 740; 750 и 1090 МГц. Частоты 1030 и 1090 МГц соответствуют международным нормам ICAO и являются обязательными. Остальные частоты используют в зависимости от конкретных требований к данному радиолокатору. Структурная схема системы вторичной радиолокации (СВРЛ) состоит из вторичного радиолокатора ВРЛ и самолетных ответчиков СО (рис, 2), совокупность которых и образует рассматриваемую систему. В такой системе ВРЛ выполняет функцию запросчика. Сигналы запросов и ответов отличаются кодами и несущими частотами, что позволяет уменьшить влияние отраженных от окружающих ВРЛ местных объектов сигналов на работу ВРЛ.
Состав оборудования ВРЛ и его функциональные связи с устройствами первичного радиолокатора зависят от степени автономности ВРЛ. Последний может использоваться как в автономном режиме, так и совместно с ПРЛ. Автономная работа ВРЛ заключается в следующем. Синхронизирующий сигнал, вырабатываемый в устройстве управления и сихронизации УУС, запускает шифратор Ш, который выдает код запроса. Формат кода определяется типом и видом СВРЛ и режимом работы СВРЛ. Полученный код используется для модуляции передатчика Прд. Модулированные колебания Прд через фидерный тракт ФТ поступают в антенную систему АС и излучаются в пространство. Поскольку ВРЛ применяется не только для получения дополнительной информации с ЛА, но и для определения координат последнего, антенна ВРЛ имеет остро направленную ДН. Обзор воздушного пространства осуществляется при вращении антенны ВРЛ.
Рис.2 Структурная схема системы вторичной радиолокации. |
Последнее изменение этой страницы: 2020-02-17; Просмотров: 163; Нарушение авторского права страницы