
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Методы измерения радиальной скорости
Измерение радиальной скорости основано на определении доплеровского сдвига частоты отражённого сигнала. Схема простейшей станции, обеспечивающей измерение доплеровской частоты сигналов, приведена на рис. 1. Рисунок 1. Функциональная схема измерителя доплеровской частоты.
Генератор высокой частоты (f0) создаёт незатухающие колебания, излучаемые в пространство. Частота сигнала, отражённого от движущейся цели, будет отличаться от f0 на доплеровский сдвиг Fд; отражённый сигнал можно записать таким образом:
Принятые колебания смешиваются с колебаниями генератора
Рассмотренному радиолокационному устройству присущи все достоинства и недостатки станций с непрерывным излучением. К специфическим достоинствам самого метода измерения следует отнести: простоту устройства станции; нечувствительность к медленным уходам частоты генератора. Наиболее существенные недостатки метода: высокие требования к кратковременной стабильности частоты генератора (за время распространения радиоволн до цели и обратно); влияние любой паразитной модуляции колебаний генератора на работоспособность устройства; возникновение помех работе станции при наличии нескольких целей (на выходе детектора будут образовываться комбинации доплеровских частот и их гармоники На рис. 2. показана РЛС и цель, движущаяся со скоростью v. Радиальная скорость цели (проекция на линию РЛС – цель) равна
Задача сводится к определению частоты отраженных колебаний. При этом, как и выше, речь пойдет о точечной цели, размеры которой значительно меньше, чем размеры разрешаемого объема. Прежде чем решать эту задачу применительно к радиолокации, целесообразно ее рассмотреть для случая акустических волн, распространяющихся в среде (например, воздушной) с определенной скоростью v0. Пусть, как и на рис. 2, цель удаляется от источника с радиальной скоростью vpотносительно среды.
Рис. 2. Радиальная скорость цели относительно РЛС Одни и те же фазы излучаемых волн, например максимумы, следуют в среде на расстоянии l=v0T друг от друга (где Т=1/f0 — период колебаний источника). Максимумы волны приближаются к цели с относительной скоростью v'=v0-vр. Поэтому интервал времени между двумя прохождениями максимумов мимо удаляющейся цели, т. е. период колебаний, воздействующих на цель, равен Т'=l/v'=v0T/(v0-vр). Таким образом, частота колебаний, воспринимаемых движущимся с целью наблюдателем равна
При отражении цель можно рассматривать как движущийся со скоростью vр источник колебаний частоты f'. Неподвижный наблюдатель теперь находится в точке расположения РЛС. Если такая цель — источник неподвижна, то наблюдатель воспринимает колебания, например максимумы, с тем же периодом Т'. Движущаяся же цель за каждый период удаляется на расстояние vрТ'. Поэтому период воспринимаемых неподвижным наблюдателем отраженных колебаний равен Т" =Т'+vpT'/v0, откуда частота
Прежде всего сравним формулу (1) с (2) при f'=f0 т. е. случай движущегося наблюдателя и движущегося источника. Сравнение показывает, что для акустических волн небезразлично, наблюдатель движется или источник. Отношение этих частот равно 1-(vp/v0)2. Лишь при vp< < v0это отношение близко к единице. Найдем теперь для рассматриваемого случая частоту отраженных колебаний. Подставляя в (2) вместо f' ее значение из (1), получаем частоту отраженных колебаний.
Если в случае акустических волн движение источника и наблюдателя относительно среды приводит к двум различным выражениям для эффекта Доплера, то для электромагнитных волн это не так. Теория относительности утверждает, что обе частоты равны. Эффект Доплера, как и все физические явления, инвариантен относительно выбора инерциальной системы отсчета (движущейся относительно данной равномерно и прямолинейно). Вернемся вновь к рис. 2. Рассмотрим сначала систему координат, связанную с источником (РЛС). Частота f', с которой электромагнитные колебания воздействуют на движущегося наблюдателя (цель), может быть определена по «классической» формуле (1), в которой скорость v0 заменяется скоростью с:
где q - угол между направлением наблюдения и вектором скорости в системе координат, связанной с источником (РЛС). Однако наблюдатель (цель) будет оценивать эту частоту иначе. Согласно теории относительности надо учесть разницу в течении времени для двух наблюдателей путем деления полученного значения частоты на Ö (1-v2/c2)(преобразование Лоренца). Таким образом, частота колебаний, возникающих на поверхности цели, равна
Интересно, что при q=900, т. е. при радиальной скорости vр=0, наблюдается так называемый поперечный эффект Доплера. Данное явление экспериментально подтверждено в опытах с большими скоростями v, где источником света служил пучок каналовых лучей водорода, имеющих скорости v»106 м/с (опыты Айвса, 1938 г.). Произведем оценку частоты отраженных от цели колебаний. Система координат, связанная с РЛС, соответствовавшая до отражения источнику, теперь соответствует наблюдателю. Наблюдатель воспринимает согласно «классической» формуле частоту
Однако, так как источник (цель) движется, его фактическая частота из-за релятивистского замедления времени должна быть умножена на Ö (1-v2/c2). Таким образом,
Что касается сравнения эффекта Доплера при движущемся наблюдателе и движущемся источнике, то проще всего это сделать при q=0. Если заменить в (7) f1 на f0, то выражения (7) и (5) полностью совпадут. При q¹ 0 следует учесть, что в формуле (7) этот угол задан в неподвижной системе отсчета наблюдателя (РЛС). Для сравнения с формулой (5) при движущемся наблюдателе надо в ней q заменить на q' — угол в движущейся системе отсчета (цель в качестве наблюдателя). С помощью известной из специальной теории относительности формулы преобразования углов
получим, что формула (7) переходит в (5) и наоборот. Возвращаясь к случаю радиолокации, найдем путем сравнения формул (5) и (7), что
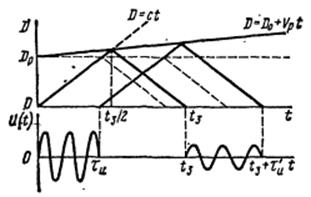
т. е. не отличается от формулы (3). Это является следствием особенностей преобразований Галилея и Эйнштейна-Лоренца, устанавливающих связь между координатами и временем в разных системах отсчета, движущихся друг относительно друга. В заключение остановимся еще на одном наглядном выводе выражения для частоты отраженных колебаний без использования специальной теории относительности на основе простейших соотношений кинематики. На рис. 3. изображен зондирующий радиоимпульс длительностью tи, начало излучения которого происходит в момент t=0. Он достигает цели в момент tз/2 (пересечение графиков зависимостей пройденного расстояния от времени для радиоволн D=ct и для цели D=D0 + vрt) и возвращается в момент tз. Срез импульса возвращается в момент tз+t/и, где t/и > tи (здесь vр> 0). Как видно,
откуда
т. е. изменяется временной масштаб: импульс расширяется при vр> 0 и сужается при vр< 0.
Рис. 3. К пояснению эффекта Доплера в радиолокации с помощью соотношений кинематики. Точно также преобразуется период следования импульсов и период вторичных колебаний: Т'п=Tn(1+vр/c)/(1- vр/c); Т2=Т0(1+vр/c)/(1- vр/c), откуда для f2=1/Т2 вновь получим формулу (8). Так как практически vр< < с, то разложение в ряд Маклорена дает f2=f0(1-2vр/c+2v2р/c2-…). Пренебрегая членами второго порядка малости и выше, имеем
Как видно из формулы, в условиях активной радиолокации допплеровская поправка частоты определяется эффектом двойного преобразования частоты: при облучении (цель как движущийся приемник энергии) и при излучении (цель как движущийся источник колебаний). В условиях пассивной радиолокации, когда трансформация частоты имеет место только при излучении,
При импульсной работе рассмотренное выше изменение масштаба времени в равной степени относится к длительности и периоду следования импульсов(т. е. эффект Доплера—Белопольского имеет место и для частоты следования).Поскольку, однако, доплеровская поправка пропорциональна частоте, обычно она наиболее существенно сказывается на высокочастотных колебаниях. |
Последнее изменение этой страницы: 2020-02-17; Просмотров: 130; Нарушение авторского права страницы

 .
. . На выходе смесителя образуются колебания с частотой Доплера. Огибающая высокочастотных колебаний (частота биений) выделяется с помощью амплитудного детектора. Далее колебания на частоте Fд усиливаются и подводятся к измерителю частоты. Шкала измерителя градуируется прямо в единицах радиальной скорости цели
. На выходе смесителя образуются колебания с частотой Доплера. Огибающая высокочастотных колебаний (частота биений) выделяется с помощью амплитудного детектора. Далее колебания на частоте Fд усиливаются и подводятся к измерителю частоты. Шкала измерителя градуируется прямо в единицах радиальной скорости цели .
. ).
). ,
, 
 . (1)
. (1) (2)
(2) (3)
(3) (4)
(4) (5)
(5) . (6)
. (6) (7)
(7)
 , (8)
, (8) ;
;  ,
,  ,
, 
 .
. .
.