
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Основные показатели качества регулирования. Выбор типа автоматического регулятора
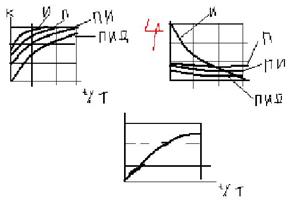
При синтезе АСР необходимо определить на сколько отклонится регулируемая величина от своего заданного значения, и как скоро завершится переходный процесс т.е. определить t.регулирования. Для определения данных параметров служат параметры качества в АСР. Графики переходных процессов в АСР приведены ниже
Рис.1 Изменение регулирующего воздействия на входе в объект Рис.2 Изменение регулируемой величины в объекте. Пунктир при отключенном регуляторе. Сплошная – переходной процесс в регуляторе, Ф0 - заданное значение регулируемой величины, Ф1- максимальные динамические отклонения регулируемой величины, Фк - потенциальное отклонение регулируемой величины в объекте при оклоненном регуляторе, график экспоненциального переходного процесса. Рис.3 График колебаний переходного процесса в АСР без остаточного отклонения регулируемой величины. Переходный процесс носит колебательно - затухательный характер Ф возвращается в значение Ф0. Рис.4 Переходной процесс АСР с остаточным отклонением регулируемой величины.
При создании АСР важной задачей является выбор типа регулятора с учетом динамической характеристики объекта регулирования и требуемых параметров качества переходных процессов. Существует несколько методов расчета и выбора типа регулятора: 1.Аналитический 2.Графоаналитический 3.Эксперимент В практике используется второй метод: Исходными данными для решения данной задачи являются следующие. В зависимости от объекта регулирования (τ, Т, Коб ), - Методика заключается в следующем: 1.По отклонению t/T определяют вид регулирования. Если t/T< 0.2, то принимается релейный регулятор. Если t/T> 0.2, то принимают регулятор непрерывные действия. 2.Принимается заданный вид типового переходного процесса, т.е. в качестве типов применяют 2 вида. 2.1 апериодический (рис 2) 2.2 колебательный с 20% перерегулированием
2.4.4 а) Параметры качества в регулирования для статических и астатических объектов
1 - Ф1- максимальное динамическое отклонение регулируемого параметра Фк - потенциальное отклонение регулируемой величины в установившемся процессе в отклоненном регуляторе.
Р – коэффициент самовыравнивания одноемкостных статических объектов Ф0 – заданное значение регулируемой величины μ max – максимальное отклонение значения регулируемой величины 2. 3. Ф’ – максимальное возмущение значения регулируемой величины в переходном процессе, Ф0 – заданное значение регулируемой величины, Ф’ - определяется для переходного процесса имеющего колебательный характер 4. τ – время регулирования для переходного процесса
5. Площадь ограничения кривой переходного процесса:
2.4.4.б) Выбор типа регуляторов непрерывного действия для статических и астатических объектов
Порядок выбора пропорционального регулятора
1) Выбирают t/T = a, по графику определяют Кдс 2) проверяют обеспечение tp< tp заданной, используя график tp/t=f(t/T) Если условие выполняется, то регулятор подходит. Регуляторы действия статических объектов. Т.к. ПР свойственна статическая ошибка, то необходимо проверить как ошибка от статической погрешности по графику. Фост. сравнивается с б, если условие не выполняется, то это означает, что для объекта он не применим, необходимо применить ПИ – регулятор. Для выбранного регулятора определяются параметры его построения: коэффициент усиления Кр, время изотрома Ти. Существуют специальные формулы, обеспечивающие заданный вид переходного процесса для расчета Кр и Ти Р. Непрерывного действия для астатических объектов. Определяется коэф. По величине Кда по таблице и принятому виду переходного процесса выбирается тип регулятора непрерывного действия.
После выбора определяется действительное врем регулирования и сравнивается с допустимым. Сравнивается действительное и заданное время регулирования, если выполняется 2.4.4 г) Выбор релейного (позиционного) регулятора статических объектов
Данный регулятор выбирается при соотношении Вид переходного процесса в АСР с применением релейного регулятора.
Переходный процесс носит колебательный характер с амплитудой Регулятору свойственна статическая погрешность. Колебания около Рис 2 и 3 – диаграммы работы регулятора. Возможно построение регулятора без зоны чувствительности (рис3). Регулятор включается /выключается при конкретном значении Выбор данного регулятора Исходные данные: 1 динамические характеристики объекта регулирования - 2 Определяется величина амплитуды колебания
Далее принимается значение
Далее определяем величину статической ошибки (
Если Если Далее проверяем Т
 находим находим  , после чего – значение Т , после чего – значение Т  . Далее по каталогу для полученных . Далее по каталогу для полученных  и Т выбираем тип релейного регулятора. При этом Т обеспечивает апериодический переходной процесс. и Т выбираем тип релейного регулятора. При этом Т обеспечивает апериодический переходной процесс.
Исполнительные механизмы по виду энергии для питания данных устройств применяются: 1. электрические исполнительные механизмы; 2. пневматические исполнительные механизмы.
Популярное:
|
Последнее изменение этой страницы: 2016-03-22; Просмотров: 1749; Нарушение авторского права страницы

 , - заданные параметры качества переходного процесса в АСР (
, - заданные параметры качества переходного процесса в АСР (  ).
).
 - динамический коэффициент регулирования статических объектов
- динамический коэффициент регулирования статических объектов
 [ед.откл/%]
[ед.откл/%]
 - динамический коэффициент регулирования астатистического объекта, τ - время запаздывания, Та – время разгона астатического объекта.
- динамический коэффициент регулирования астатистического объекта, τ - время запаздывания, Та – время разгона астатического объекта. - величина регулирования
- величина регулирования
 для периодических переходных процессов
для периодических переходных процессов для колебательных переходных процессов
для колебательных переходных процессов

 регулятор подходит
регулятор подходит /Т< 0, 2
/Т< 0, 2
 с периодом Т
с периодом Т  .
. . В исходной точке регулируемая величина увеличивается, регулятор отключается, но регулируемая величина по инерции увеличивается и затем уменьшается, так как регулятор отключен. Она уменьшается до
. В исходной точке регулируемая величина увеличивается, регулятор отключается, но регулируемая величина по инерции увеличивается и затем уменьшается, так как регулятор отключен. Она уменьшается до  увеличивается и т.д.
увеличивается и т.д. ,
, 
 без зоны нечувствительности. Для этого используется зависимость
без зоны нечувствительности. Для этого используется зависимость  , по которой находят значение
, по которой находят значение  и далее -
и далее -  .
.
 >
>  определяем зону нечувствительности релейного регулятора
определяем зону нечувствительности релейного регулятора
 , единицы физ. величины.
, единицы физ. величины. - единицы физ. величины.
- единицы физ. величины. , то релейный регулятор можно применять для данного объекта.
, то релейный регулятор можно применять для данного объекта. , то принимаем регулятор непрерывного действия.
, то принимаем регулятор непрерывного действия. 6)
6)  - время полного хода исполнительного механизма. Он выбирается по графику зависимости
- время полного хода исполнительного механизма. Он выбирается по графику зависимости 
