
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Погрешности магнитных компасов.
Всем типам датчиков магнитного курса свойственны общие методические погрешности: девиация, поворотная и креновая погрешности. Магнитные массы летательного аппарата, а также электромагнитные поля самолета, создают дополнительные магнитные поля, под влиянием которых результирующий вектор магнитного поля отклоняется от направления магнитного меридиана. Это отклонение называется девиацией компаса
Постоянная составляющая Магнитные поля летательного аппарата, вызывающие девиацию компаса, можно разделить на два типа полей: · поле, создаваемое магнитомягким железом, направление которого относительно осей летательного аппарата переменно и зависит от курса летательного аппарата; · поле, создаваемое магнитотвердым, направление которого относительно летательного аппарата не зависит от курса летательного аппарата. Стальные предметы летательного аппарата, создающие магнитное поле, обладают обычно большой коэрцитивной силой и, по существу, являются постоянными магнитами. При полете на любом курсе, они сохраняют свои свойства постоянными. Поле магнитомягкого железа зависит от положения летательного аппарата относительно поля Земли, т.е. от курса летательного аппарата.
Рассмотрим влияние магнитного поля, создаваемого стержнем с магнитным моментом M=2lm1, на стрелку компаса, один полюс которой имеет магнитную массу m. При расстоянии между магнитной массой и серединой стержня, равном r, сила взаимодействия между стержнем с магнитным моментом M и магнитной массой m определим выражением:
где угол Из этого выражения следует, что для уменьшения влияния стальных предметов на стрелку компаса нужно увеличивать расстояние и выбирать положение массы так, чтобы Если изменять курс летательного аппарата от 0 до
Разлагая эту функцию в ряд Фурье, найдем:
Коэффициент разложения А характеризует круговую (постоянную) составляющую девиации, не зависящую от курса. Эта составляющая вызывается влиянием мягкого железа, намагничиваемого магнитным полем Земли (МПЗ). Составляющие Составляющие Для уменьшения девиации полукруговой магнитные компасы снабжены девиационным прибором, представляющим собой набор магнитов, которые создают дополнительные магнитные поля. Четвертные составляющие девиации не устраняются, их определяют экспериментально и учитывают с помощью графика поправок.
При полете самолета с поперечным или продольным креном и горизонтальном положении картушки компаса, возникают, так называемые креновые девиации, появление которых обусловлено действием твердого железа. Дело в том, что при крене вертикальная составляющая силы Fв меняет свое положение в пространстве, тогда как катушка остается горизонтальной. Горизонтальная составляющая силы Fв, равная
где При продольных кренах с углом тангажа
При разворотах летательного аппарата, плоскость картушки компаса поворачивается и становится перпендикулярно равнодействующей сил веса и инерции. Но в таком случае на катушку начинает действовать вертикальная составляющая МПЗ, вызывая появление поворотной погрешности. При правильном вираже самолета (рис. 6), картушка компаса расположится в плоскости A, наклоненной под углом Катушка компаса будет располагаться по направлению равнодействующей силы, лежащей в плоскости картушки, и обусловленной действием горизонтальной и вертикальной составляющих МПЗ.
где
Равнодействующая Tx и Ty направлена под углом
Величина поворотной ошибки
Креновая погрешность обуславливается воздействием на чувствительные элементы компаса (датчика) горизонтальной проекции составляющей напряженности поля твердого железа, направленной по нормальной оси летательного аппарата. Эта проекция возникает при ненулевых углах крена и тангажа. При этом предполагается, что плоскость чувствительных элементов горизонтальна, так что горизонтальные ускорения отсутствуют. Наиболее существенной методической погрешностью является поворотная. Она возникает не только при разворотах, но и при любых эволюциях ЛА с ускорениями, когда плоскость основания чувствительных элементов становится не горизонтальной. Вследствие этого изменяется направление проекции вектора T поля Земли (рис. 2) на эту плоскость, что и служит причиной поворотной погрешности.
Курсовые системы
Принцип построения . Ни один из применяемых компасов (датчиков курса) вследствие присущих им недостатков не может обеспечить точное измерение курса в любых условиях полета. По этой причине, а также с целью повышения надежности измерений широко применяются курсовые системы, основанные на комплексном использовании разнородных датчиков курса, при котором уменьшается результирующая погрешность измерения. Базовым датчиком курса в любой курсовой системе служит курсовой гироскоп, корректируемый (непрерывно либо эпизодически) от магнитного либо астрономического датчика. Типовая схема взаимодействия датчиков магнитного
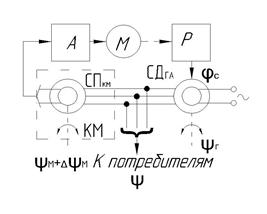
Сигнал курса Убедимся, что рассматриваемая схема с точностью до погрешностей обеспечивает равенство Пусть Из схемы следует, что постоянная составляющая погрешности При астрокоррекции гироскопического датчика применяется схема, подобная рассмотренной. Следует подчеркнуть, что медленно меняющиеся погрешности корректирующих датчиков (магнитного либо астрономического), обусловленные маневрированием ЛА, могут вызвать значительные погрешности курса. Поэтому по мере совершенствования курсовых гироскопов применение режимов их длительной коррекции в курсовых системах ограничивается.
НАЗНАЧЕНИЕ
Курсовая система «Гребень» предназначена для определения курса самолета (вертолета) и для обеспечения сигналами курса как индикаторов курса летчика и штурмана, так и всех самолетных (вертолетных ) устройств, решающих задачи навигации и пилотирования. Система «Гребень» является централизованным самолетным устройством, объединяющим гироскопические, магнитные и астрономические средства определения курса. Система «Гребень», предназначена для установки на самолеты и вертолеты. В зависимости от решаемых задач и условий полета система может работать в следующих режимах: - гирополукомпаса ГПК, - астрокоррекции АК, - магнитной коррекции МК, - начальной выставки или задатчика курса ЗК. -
В процессе работы система получает электрические сигналы от самолетных датчиков: - угловой скорости разворота; - истинного или ортодромического курса, определяемого дистанционным астрокомпасом или звездно-солнечным ориентатором; - синуса широты места; - угла крена; - путевой скорости;
КОМПЛЕКТАЦИЯ
Курсовая система «Гребень» выпускается в двух комплектациях: «Гребень-1» одинарная и «Гребень-2» сдвоенная. В табл. 1 указаны приборы, из которых состоит курсовая система «Гребень».
Таблица 1.
ТЕХНИЧЕСКИЕ ДАННЫЕ
2.3.1. Погрешность системы в режиме ГПК в нормальных климатических условиях и при температуре +500C не превышает 2.3.2. Погрешность в определении магнитного курса на широтах до 2.3.3. Погрешность дистанционной передачи сигналов курса на СКТ не превышает 2.3.4. Дополнительная погрешность в режимах ГПК на каждую минуту действия линейных или виражных ускорений, а также при выборе высоты или снижений не более 0, 10. 2.3.5. Количество внешних потребителей курса, эквивалентных СКТ-265П, должно быть не более шести. 2.3.6. Время готовности к работе не более: · В режиме коррекции (МК, АК, ЗК) – 3 мин. · В режимах ГПК – 5 мин. При температуре -600С время готовности системы к работе не более 10 мин. 2.3.7. Напряжение и частота в источниках питания: · Для цепей 3-х фазного переменного тока · Для цепей постоянного тока: -27 2.3.8. Скорости согласования: · Нормальная скорость в режимах МК, АК, ЗК – от 2 до 40/мин. · Большая скорость в режимах МК, АК, ЗК – не менее 100/мин. 2.3.9. Потребляемая мощность указана в табл. 2 Таблица 2
2.3.10. Переменный ток, потребляемый системой в установившемся режиме, указан в табл. 3.
Таблица 3
2.3.11. Вес: · Гребень-1 – не более 13, 5 кг. · Гребень-2 – не более 17 кг.
ПРИНЦИП ДЕЙСТВИЯ
В курсовой системе Гребень используется принцип совместной работы гироскопа направления с каким-либо датчиком курса (корректором). Это принцип заключается в том, что такой датчик (корректор) определяет курс самолета (вертолета) относительно магнитного или истинного меридиана и выдает его для коррекции сигналов курса, снимаемых с гироагрегата. В зависимости от решаемых задач и условий полета система может работать в одном из следующих режимов: - начальной выставки или задатчика курса; - гирополукомпаса; - астрокоррекции; - магнитной коррекции; Переключение между режимами осуществляется с помощью пульта управления.
Основным режимом работы курсовой системы является режим гирополукомпаса с начальным согласованием перед взлетом сигналов курса по магнитному курсу от магнитного корректора, или по истинному курсу от астрокорректора, или от задатчика курса при известном стояночном курсе самолета (вертолета). Гирополукомпас – это авиационный гироскопический прибор, реагирующий на отклонение самолета от взятого направления полета. Принципе действия гирополукомпаса основан на свойстве свободного гироскопа сохранять неизменным положение оси собственного вращения относительно мирового пространства. В гироскопе, предназначенном для определения отклонения от взятого направления, ось вращения ротора (главная ось) должна быть расположена горизонтально. Удержание главной оси Z в горизонтальном положении осуществляетьс яс помощью корректирующего устройства – горизонтальной коррекции. На географических полюсах Земли свободный гироскоп с горизонтальной осью собственного вращения «уходит» по курсу с угловой скоростью равной угловой скорости вращения Земли: ω = На любой другой широте угловая скорость «ухода» оси гироскопа в горизонтальной плоскости равна вертикальной составляющей вектора угловой скорости вращения Земли на данной широте. ω = ω - угловая скорость ухода на данной широте
Ψ - широта места. В северном полушарии горизонтально расположенная ось гироскопа уходит по направлению вращения часовой стрелки, а в южном полушарии - против часовой стрелки. Компенсация уходов гироскопов, вызываемых суточным вращением Земли, осуществляется при помощи широтного компенсатора. Широтный компенсатор состоит из мостового задатчика сигналов широты места, усилителя и азимутального датчика местности. При подаче на вход усилителя напряжения, пропорционального по величине задаваемой широте Ψ, с выхода усилителя на обмотку датчика моментов поступает ток. Взаимодействие магнитного поля, создаваемого током в обмотке статора датчика моментов, с постоянным магнитом ротора. Расположенного на горизонтальной оси гиросокопа, создает момент, вызывающий прецессию оси гироскопа в нужном направлении и с необходимой скоростью в зависимости от широты места. Эта прецессия гироскопа компенсирует «кажущийся» уход гироскопа, вызываемый суточным вращением Земли. Стабилизация момента, развиваемого датчиком моментов в рабочем диапазоне температур обеспечивается наличием напряжения обратной связи, поступающего на вход усилителя с проволочного сопротивления выполненного из материала с малым температурным коэффициентом сопротивления. Для формирования и выдачи напряжения, пропорционального широте места, служит мостовой задатчик сигналов, расположенный в пульте управления курсовой системы. Одна из диагоналей мостового задатчика питается от специального стабилизатора напряжения пульта управления а вторая диагональ одним концом соединена со входом усилителя и втором концом с сопротивлением обратной связи, соединенным этим же концом с обмоткой статора датчика моментов. Мостовой задатчик сигналов содержит два переменных сопротивления R1 и R3. R1 являеться широтным потенциометром, а R3 – баласировачным потенциометром. Широтный потенциометр служит для подачи напряжения на вход усилителя в зависимости от широты места. Балансировочный потенциометр предназначен для выдачи дополонительного напряжения на вход усилителя для компенсации уходов гироскопа от его разбаланса в процессе работы. Сигнал курса выдается потребителем с синусно-косинусного трансформатора типа СКТ-265д гидроагрегата, ротор которого закреплен на вертикальной оси гидроагрегата. Под действием момента широтной коррекции вертикальная ось гироскопа с ротором СКТ будет поворачиваться в сторону, противоположную «кажущемуся» уходу, тем самым сохраняя неизменным положение горизонтальной оси гироскопа относительно координат места вылета, связанных с Землей. Режим магнитной коррекции применяется для согласования сигналов курса, выдаваемых гирополукомпасом, с показаниями датчика магнитного курса. Чувствительным элементом определяющим магнитный курс является индукционный датчик ИД-6, сигнальные обмотки которого связаны со статорными обмотками СКТ-приемника первого канала коррекционного механизма КМ-2. Напряжение снимаемое с обмоток ротора СКТ-приемника первого канала КМ-2, подается на вход усилителя и далее на обмотку управления электродвигателя, который через редуктор приводит ротор СКТ-приемника в положение, соответствующее нулевой ЭДС на входе усилителя. Таким образом, любому повороту индукционного датчика на какой-либо угол в горизонтальной плоскости относительно вектора горизонтальной составляющей магнитного поля Земли, т.е. углу разворота самолета, будет соответсвовать поворот на такой же угол ротора СКТ-приемника коррекционного механизма. На одну ось с ротором СКТ-приемника первого канала коррекционного механизма посажен СКТ-применика второго канала КМ-2, статор которого свзяан трехпроходной связью со статором СКТ-датчика гидроагрегата ГА-Е. Сигнал рассогласования между положением в пространстве горизонтального оси гироскопа и СКТ-применика второго канала коррекционного механизма поступает на вход усилителя гиромагнитного курса и далее на датчик моментов ДМ-6, расположенный на горизонтальной оси, вызывающий прецессию гироскопа относительно измерительной (вертикальной) оси. Прецессия гироскопа продолжается до тех пор, пока не наступит согласованное положение СКТ-приемника коррекционного механизма и СКТ-датчика гидроагрегата. При такой свзяли «индукционный датчик – коррекционный механизм – гидроагрегат» с измерительной оси гироскопа снимается гироскопический курс, непрерывно корректируемый по магнитному курсу, т.е. гиромагнитный курс. Режим астрокоррекции принципиально аналогичен режиму магнитной коррекции с той лишь разницей, что курс самолета определяется с помощью астрономических компасов. Роль СКТ-приемника второго канала КМ-2 в данном случае выполняет СКТ-приемник, связанный с измерительной осью астрокопаса. Режим начальной выставки или задатчика курса так же как и астрокоррекции принципиально аналогичен режиму магнитной коррекции. В режиме задатчика курса положение СКТ-датчика гидроагрегата приводиться в согласованное положение с СКТ-приемником задатчика курса. Необходимое значение курса, по которому должен быть согласован гироагрегат, устанавливается с помощью задатчика курса летчиком, который получает информацию о вводимом курсе от устройства начальной выставки. При развороте самолета с угловой скоростью, превышающей 0, 1-0, 30сек., происходит отключение магнитной коррекции гироагрегата. Сигнал на отключение коррекции поступает с размыкающих контактов реле выключателя коррекции (ВК). Гироагрегат переключается в режим ГПК. После окончания разворота система переходит в заданный режим работы.
БЛОК СХЕМА
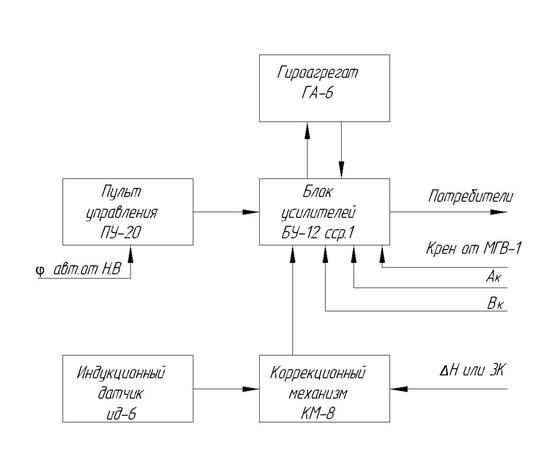
Курсовая система «Гребень-1», блок-схема которой приведена на рис. 9 состоит из следующих блоков: гироагрегата ГА-8, пульта управления ПУ-38, коррекционного механизма КМ-2, индукционного датчика ИД-6, блока усилителей БУ-12 сер. 1 и рамы амортизаторной РА-6 сер. 1.
ПРОВЕРКА РАБОТОСПОСОБНОСТИ Выключить выключатели «-27В», «36В 400Гц» на «КПАП-В». Через 10 минут после включения питания переключатель режима на ПУ-38 поставить в положение «МК». Нажать кнопку «контроль» на КМ-2. УППС и РМИ-2 должны отработать курс 315
Популярное:
|
Последнее изменение этой страницы: 2016-03-16; Просмотров: 2689; Нарушение авторского права страницы
 . Девиация считается положительной, если северный конец вектора магнитного поля отклонился к востоку от меридиана.
. Девиация считается положительной, если северный конец вектора магнитного поля отклонился к востоку от меридиана.
 . Из переменных составляющих, являющихся периодическими функциями
. Из переменных составляющих, являющихся периодическими функциями  , называемая полукруговой девиацией и обусловленная магнитотвердым железом. Ее компенсируют девиационными приборами с постоянными магнитами, располагаемыми на корпусе датчика. Положение магнитов регулируют так, чтобы вектор их поля стал равным и противоположным вектору поля магнитотвердого железа. В некоторых курсовых системах используют электромагнитный способ компенсации полукруговой девиации. Остальные составляющие в компасах типа КИ учитываются с помощью поправочных графиков, а в курсовых системах компенсируются специальными лекальными коррекционными устройствами (ЛКУ).
, называемая полукруговой девиацией и обусловленная магнитотвердым железом. Ее компенсируют девиационными приборами с постоянными магнитами, располагаемыми на корпусе датчика. Положение магнитов регулируют так, чтобы вектор их поля стал равным и противоположным вектору поля магнитотвердого железа. В некоторых курсовых системах используют электромагнитный способ компенсации полукруговой девиации. Остальные составляющие в компасах типа КИ учитываются с помощью поправочных графиков, а в курсовых системах компенсируются специальными лекальными коррекционными устройствами (ЛКУ). , (1.1)
, (1.1) - угол между осью магнита (стержня) и осью ординат, проходящее через массу m и середину стержня.
- угол между осью магнита (стержня) и осью ординат, проходящее через массу m и середину стержня. или
или  .
. , то взаимное расположение твердого и мягкого железа будет повторяться с периодом
, то взаимное расположение твердого и мягкого железа будет повторяться с периодом  с периодом
с периодом 

 дважды обращаются в нуль при изменении курса от 0 до
дважды обращаются в нуль при изменении курса от 0 до  и
и  называются четвертными. Они вызваны влиянием магнитомягкого железа.
называются четвертными. Они вызваны влиянием магнитомягкого железа. (где
(где  - угол крена летательного аппарата) направлена перпендикулярна продольной оси летательного аппарата. Проекция этой составляющей на направление перпендикулярное к магнитному меридиану будет:
- угол крена летательного аппарата) направлена перпендикулярна продольной оси летательного аппарата. Проекция этой составляющей на направление перпендикулярное к магнитному меридиану будет:  и вызывает девиацию магнитного компаса:
и вызывает девиацию магнитного компаса:  , (1.2)
, (1.2) - горизонтальная составляющая напряженности суммарного магнитного поля вдоль меридиана.
- горизонтальная составляющая напряженности суммарного магнитного поля вдоль меридиана. , аналогично, получаем:
, аналогично, получаем:  (1.3)
(1.3) , (1.4)
, (1.4) - угол наклонения вектора МПЗ.
- угол наклонения вектора МПЗ.
 к оси летательного аппарата – OX и определяет положение картушки:
к оси летательного аппарата – OX и определяет положение картушки:  (1.5)
(1.5) представляет разность между действительным курсом
представляет разность между действительным курсом  (1.6)
(1.6) курсов поясняется на рис. 7. Роль датчика
курсов поясняется на рис. 7. Роль датчика  (
(  с помощью показанной на рисунке следящей системы.
с помощью показанной на рисунке следящей системы. и
и  .
. .
. = 0. Тогда в согласованном положении следящей системы, когда напряжение роторной обмотки СПкм равно рулю, напряжения статорных обмоток этого сельсина будут однозначно определяться только значением
= 0. Тогда в согласованном положении следящей системы, когда напряжение роторной обмотки СПкм равно рулю, напряжения статорных обмоток этого сельсина будут однозначно определяться только значением  вне зависимости от величины
вне зависимости от величины  (равенство
(равенство  .
. 10/час, при температуре до -600С не превышает
10/час, при температуре до -600С не превышает  В частота 4008Гц.
В частота 4008Гц.

 - угловая скорость вращения Земли, равная 15 град/час
- угловая скорость вращения Земли, равная 15 град/час