
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ДИНАМИКА ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ
План 1. Первый закон Ньютона и понятие инерциальной системы отсчёта. 2. Второй закон Ньютона как уравнение движения. Понятия массы, силы, импульса. 3. Третий закон Ньютона и пределы его применения. 4. Неинерциальные системы отсчёта. Абсолютные и относительные скорости и ускорения. Силы инерции (центробежная сила и сила Кориолиса). 5. Центр инерции (центр масс). Теорема о движении центра инерции. 1. 1-й закон Ньютона. Материальная точка, не подверженная внешним воздействиям, либо находится в покое, либо движется равномерно и прямолинейно. Такое тело называется свободным, его движение – свободным движением, или движением по инерции. Классическая механика постулирует, что существует система отсчёта, в которой все свободные тела движутся прямолинейно и равномерно. Такая система называется инерциальной системой отсчёта. Таким образом, 1-й закон Ньютона выражает критерий инерциальности системы отсчёта. 2. 2-й закон Ньютона. Производная импульса материальной точки по времени равна действующей на неё силе.

где – импульс (количество движения), векторная величина, равная для материальной точки произведению её массы на скорость
Импульс механической системы равен геометрической сумме импульсов всех точек системы. Сила 1) гравитационное (обусловлено всемирным тяготением); 2) электромагнитное (осуществляется через электрические и магнитные поля); 3) сильное, или ядерное (обеспечивающее связь частиц в атомном ядре); 4) слабое (ответственное за многие процессы распада элементарных частиц). Пример использования 2-го закона Ньютона как уравнения движения:
3. 3-й закон Ньютона. Силы взаимодействия двух материальных точек равны по величине, противоположно направлены и действуют вдоль прямой, соединяющей эти материальные точки. Третий закон, как и 1-й и 2-й, справедливы лишь в инерциальных системах отсчёта. Кроме того, отступление от 3-го закона наблюдается в случае движения тел со скоростями, сравнимыми со скоростью света. В случае движущихся зарядов необходимо учитывать также взаимодействие с магнитными полями, создаваемыми ими. Пусть два положительных заряда
Рис. 2.1 Магнитные силы Лоренца 4. Неинерциальные системы отсчёта. Силы инерции. Изобразим две системы отсчёта, из которых К является инерциальной, а система
Рис. 2.2 В случае, когда система
где
где
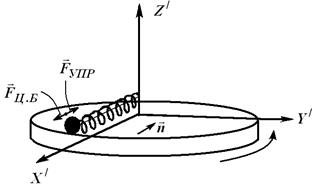
То есть относительно системы Движение относительно выбранной условно неподвижной системы называется абсолютным. Вектор Центробежная сила инерции Пусть на некотором диске имеется радиальная направляющая, на которую наденем шарик, привязанный к оси диска пружиной (рис. 2.3). При раскручивании диска шарик растягивает пружину до тех пор, пока упругая сила
Рис. 2.3
где
Относительно системы
где Эта сила называется центробежной силой инерции. Она возникает во вращающихся (неинерциальных) системах отсчёта независимо от того, покоится тело в этой системе или движется относительно неё со скоростью Сила Кориолиса Густав Кориолис (1792 – 1873) – французский учёный в области механики.
Возьмём горизонтально расположенный диск, вращающийся относительно инерциальной системы отсчёта с постоянной угловой скоростью Центростремительное ускорение:
Сила натяжения нити:
где
или (Формально это выглядит как 2-й закон Ньютона). Здесь
Многие течения в мировом океане, а также ветры-пассаты обязаны своим происхождением силе Кориолиса. Силы Кориолиса необходимо учитывать при движении ракет и т.д. 5. Центр инерции. Определение.Центром инерции (центром масс) системы материальных точек (частиц) называется точка С, положение которой задаётся радиус-вектором
где Замечание: в однородном поле сил тяжести центр инерции совпадает с центром тяжести системы.
Популярное:
|
Последнее изменение этой страницы: 2016-03-25; Просмотров: 839; Нарушение авторского права страницы

 и направленная вдоль
и направленная вдоль  – масса – мера инертности тел.
– масса – мера инертности тел. в механике – мера механического действия на данное материальное тело других тел. Это действие может иметь место как при непосредственном контакте, так и через посредство создаваемых телами полей (электромагнитным, полем тяготения). Сила – величина векторная и в каждый момент времени характеризуется численным значением, направлением в пространстве и точкой приложения. Сложение сил производится по правилу параллелограмма. В современной физике различают 4 вида взаимодействий:
в механике – мера механического действия на данное материальное тело других тел. Это действие может иметь место как при непосредственном контакте, так и через посредство создаваемых телами полей (электромагнитным, полем тяготения). Сила – величина векторная и в каждый момент времени характеризуется численным значением, направлением в пространстве и точкой приложения. Сложение сил производится по правилу параллелограмма. В современной физике различают 4 вида взаимодействий: 
 Дано:
Дано:
 ,
,


 ,
,

 .
.
 ,
,
 ,
,
 ,
,
 .
При
.
При  ,
,  ,
, 
 ,
,
 ,
,
 ,
,
 .
При
.
При  ,
,  ,
,
 .
.


 и
и  двигаются со скоростями
двигаются со скоростями  и
и  (рис. 2.1). На каждый заряд со стороны другого действует как кулоновская
(рис. 2.1). На каждый заряд со стороны другого действует как кулоновская  , так и лоренцева силы
, так и лоренцева силы  . Направления векторов индукции магнитных полей
. Направления векторов индукции магнитных полей  и
и  , создаваемых частицами
, создаваемых частицами 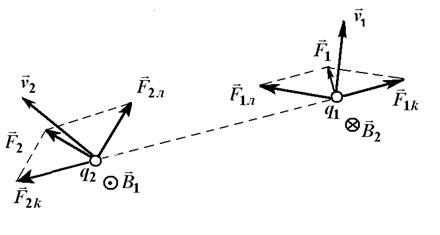
 и
и  не совпадают по направлению. Результирующие силы
не совпадают по направлению. Результирующие силы  и
и  не равны друг другу и не направлены противоположно.
не равны друг другу и не направлены противоположно. движется относительно К с некоторым ускорением и, следовательно, неинерциальная (рис. 2.2).
движется относительно К с некоторым ускорением и, следовательно, неинерциальная (рис. 2.2).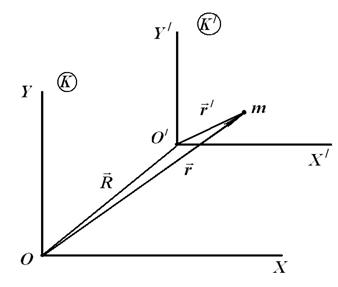


 радиус-вектор точки m в системе К;
радиус-вектор точки m в системе К;  радиус-вектор начала координат
радиус-вектор начала координат  ;
;  радиус-вектор точки m в системе
радиус-вектор точки m в системе  ,
,  ,
,  ускорение частицы m в системе К ;
ускорение частицы m в системе К ;  – ускорение начала
– ускорение начала  – ускорение частицы в системе
– ускорение частицы в системе  ; умножим обе части этого уравнения на m, получим
; умножим обе части этого уравнения на m, получим , здесь
, здесь  по 2-му закону Ньютона сила, действующая на частицу со стороны других тел
по 2-му закону Ньютона сила, действующая на частицу со стороны других тел 
 . Эта сила называется силой инерции.
. Эта сила называется силой инерции. даёт абсолютную скорость,
даёт абсолютную скорость,  абсолютное ускорение, а
абсолютное ускорение, а  и
и  относительные скорость и ускорение.
относительные скорость и ускорение. не станет равной
не станет равной  .
.

 центростремительное ускорение;
центростремительное ускорение;  угловая скорость.
угловая скорость. , направленная вдоль радиуса от оси вращения диска:
, направленная вдоль радиуса от оси вращения диска: 
 единичный вектор, направленный к центру диска.
единичный вектор, направленный к центру диска. .
. При движении тела (
При движении тела (  ) в неинерциальной вращающейся системе отсчёта кроме центробежной силы возникает еще одна сила инерции, называемая силой Кориолиса.
) в неинерциальной вращающейся системе отсчёта кроме центробежной силы возникает еще одна сила инерции, называемая силой Кориолиса. (её определение будет в лекции № 3) (рис. 2.4). Допустим, что по окружности радиусом R равномерно движется привязанная нитью к оси диска материальная точка (частица) со скоростью
(её определение будет в лекции № 3) (рис. 2.4). Допустим, что по окружности радиусом R равномерно движется привязанная нитью к оси диска материальная точка (частица) со скоростью  .
.
 .
.
 ускорение частицы относительно диска. Перенося
ускорение частицы относительно диска. Перенося  в левую часть, а
в левую часть, а 
 центробежная сила инерции;
центробежная сила инерции;  сила Кориолиса, которую можно представить в виде векторного произведения:
сила Кориолиса, которую можно представить в виде векторного произведения: 
 , определённым следующим образом:
, определённым следующим образом: 
 масса
масса  й частицы;
й частицы;  радиус-вектор, определяющий положение этой частицы;
радиус-вектор, определяющий положение этой частицы;  масса системы.
масса системы.