|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Глава 6 ПРИНЦИПЫ ПОСТРОЕНИЯ УСТРОЙСТВ ТЕЛЕМЕХАНИКИ
6, 1 Общие сведения об устройствах телемеханики В электроустановках в соответствии с принятой схемой управления находят применение как местные, так и дистанционные методы управления контролируемыми объектами. Под местным понимается управление непосредственно на месте установки управляемого объекта. Местное управление может осуществляться либо вручную путем непосредственного воздействия на органы управления объектом или со щита управления электроустановки. Дистанционное управление осуществляется по линиям связи. Передача информации по линии связи осуществляется путем соединения каждого объекта управления (контроля) с соответствующим органом управления (ключом, кнопкой и т.д.) или с прибором воспроизведения информации (сигнальной лампой, табло, цифровым индикатором и т.д.). Для передачи каждого сигнала требуется наличие специальной линии связи с проводами соответствующего сечения. В связи с этим применение непосредственного дистанционного управления (контроля) экономически целесообразно лишь при местном управлении и при малом числе объектов. С увеличением расстояния передачи, объема информации и числа контролируемых объектов особое значение приобретает необходимость сокращения затрат на линии связи, обеспечения качества передачи сигналов и быстродействия системы передачи. Эти проблемы решаются с помощью устройств телемеханики, позволяющих наиболее рационально использовать линии связи и одновременно обеспечить надежную, быструю и точную передачу приказов, сигналов и результатов измерений. Телемеханическими устройствами называются технические средства, с помощью которых обеспечивается управление, контроль и регулирование производственными или технологическими процессами на расстоянии путем передачи кодированных сигналов по каналу свзи. По характеру выполняемых функций их делят на устройства телеуправления (ТУ) и телеконтроля (ТК), последние подразделяются на устройства теле- сигнализации (ТС) и телеизмерения (ТИ). Устройства телеуправления служат для управления на расстоянии отдельными объектами или целыми производственными комплексами. Наиболее часто они осуществляют передачу двухпозиционных команд («Включить—отключить», «Прибавить— убавить»), однако могут передавать также терхпозиционные и многопозиционные команды. Большинство объектов управления электроустановок являются двухпозиционными. К многопозиционным объектам относятся, например, различные задвижки, затворки и другая трубопроводная арматура систем водоснабжения, теплоснабжения. Устройства телесигнализации служат для контроля на расстоянии за состоянием или положением объектов управления (У) и контроля (К) (рис. 6.1). Устройства ТС в основном также передают информацию в виде двухпозиционных сигналов типа «Включено—отключено». Телесигнализация может передаваться на диспетчерский пункт (ДП) периодически, автоматически в результате изменения положения или состояния одного
из объектов или поступает на ДП по вызову (запросу) диспетчера, т.е. по команде, поступающей на контролируемый пункт (КП) по системе ТУ. Устройства телеизмерения служат для контроля на расстоянии за параметрами контролируемых процессов: напряжением, током и т.д. Наряду с системами телемеханики, предназначенными для выполнения какой- либо одной из указанных выше функций (ТУ, ТС, ТИ), широко используются также комплексные системы телемеханики, выполняющие все перечисленные выше функции или различные их сочетания. На рис. 6.1 приведена классификация телемеханических систем по различным признакам: характеру передаваемых сообщений — непрерывные и дискретные; расположению объектов управления и контроля — сосредоточенные и рассредоточенные (рис. 6.2); выполняемым функциям — телеуправление, телесигнализация, телеизмерение и комбинированные (комплексные); структуре линий связи — радиальная, цепочечные (лучевые), древовидные и смешанные (рис. 6.3); способу передачи сообщений — одноканальные и многоканальные с электрическим, частотным и временным разделением каналов; виду каналов связи — электрические и неэлектрические (оптические, акустические, пневматические, гидравлические); виду объектов управления и контроля — неподвижные и подвижные.
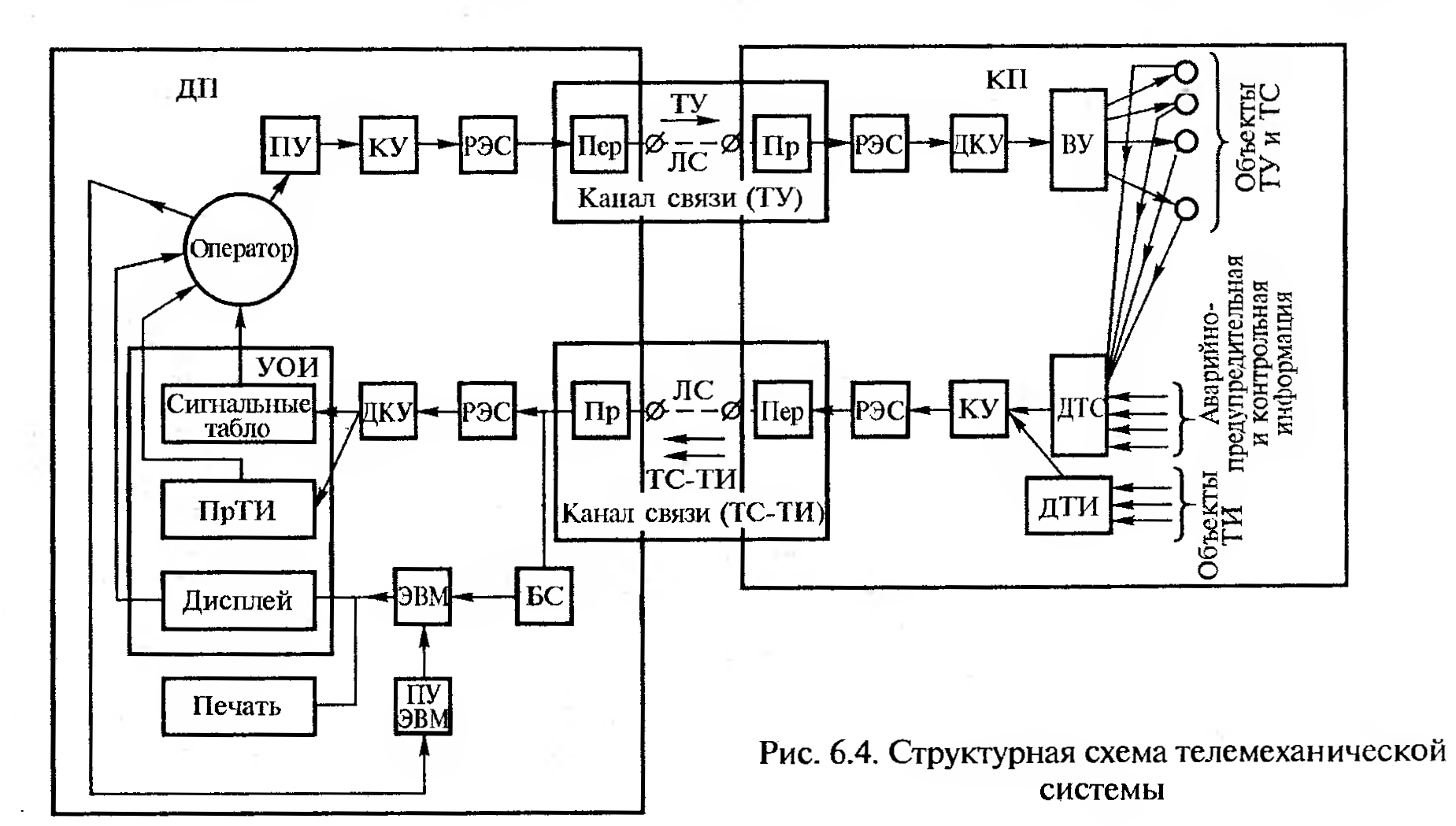
Управление телемеханическими объектами осуществляет обычно оператор или диспетчер из диспетчерского пункта (ДП), на котором размещается диспетчерский полу- комплект аппаратуры телемеханики. На контролируемых пунктах (КП) размещается аппаратура полукомплектов контролируемых пунктов и объекты управления и контроля. Обычно с одного ДП производится кон'фоль и управление объектами нескольких КП. Если объекты сосредоточены в одном месте (например, тяговая подстанция), то на всю группу устанавливается один полукомплект аппаратуры телемеханики контролируемого пункта КП, связь которого с объектами осуществляется по системе местного дистанционного управления (рис. 6.2, а). При рассредоточении объектов по одному или небольшими группами на сравнительно больших расстояниях возле каждого объекта или группы устанавливают отдельный полукомплект аппаратуры (6.2, б). Примером таких объектов могут являться разъединители контактной сети. На рис. 6.4 представлена структурная схема комплексной системы телемеханики для сосредоточенных объектов, включающая в себя полукомплекты диспетчерского и контролируемого пунктов, связанные между собой каналами связи ТУ и ТС-ТИ. На ДП оператор (диспетчер) с помощью кнопок на пульте управления ПУ набирает приказ, который поступает на кодирующее устройство КУ и далее в виде кода — на блок разделения элементов сигнала РЭС. Каждый элемент кодовой серии поступает на передатчик Пер канала связи и передается по своему электрическому, частотному или временному каналу, образованному в линии связи JTC. Кодовая серия приказа по JTC ТУ поступает на приемник Пр канала связи КП, где происходит усиление сигнала, очищение от помех. После этого кодовая серия подается
на блок РЭС, преобразуется в вид, удобный для декодирования декодирующим устройством ДКУ, затем в виде определенного приказа через выходное устройство ВУ поступает на объект управления. Результатом является переключение объекта ТУ. Информация о состоянии объектов, аварийно-предупредительная и контрольная информация о режимах работы оборудования поступает на датчики телесигнализации ДТС. Информация о контролируемых параметрах, от объектов ТИ подается на датчики телеизмерения ДТИ. Преобразованная с помощью ДТС и ДТИ информация передается в кодирующее устройство КУ и далее в виде кодовой серии на блок РЭС. Элементы кодовой серии после разделения по индивидуальным электрическим, частотным или временным каналам, образованным передатчиком Пер каналов связи ТС-ТИ по линии связи ЛС передаются на диспетчерский пункт ДП.
Приемник Пр канала связи ТС-ТИ принимает информацию, преобразует ее для дальнейшего использования. Через блок РЭС и декодирующее устройство ДКУ информация поступает на устройство отображения информации УОИ диспетчерского пункта, воспроизводится с помощью сигнальных табло и приемников телеизмерения ПрТИ и воздействует на оператора. С приемника канала связи ТС-ТИ информация передается через блок согласования БС на компьютер ЭВМ диспетчера, который пользуясь пультом управления ПУ ЭВМ выводит информацию на дисплей или в печать. На ДП устанавливается диспетчерский щит (рис. 6.5) с мнемосхемой электроустановки или диспетчерского круга, работой которого руководит диспетчер. На щите устанавливаются переключатели с сигнальными тиратронами или светодиодами, сигнализирующими состояние объектов.
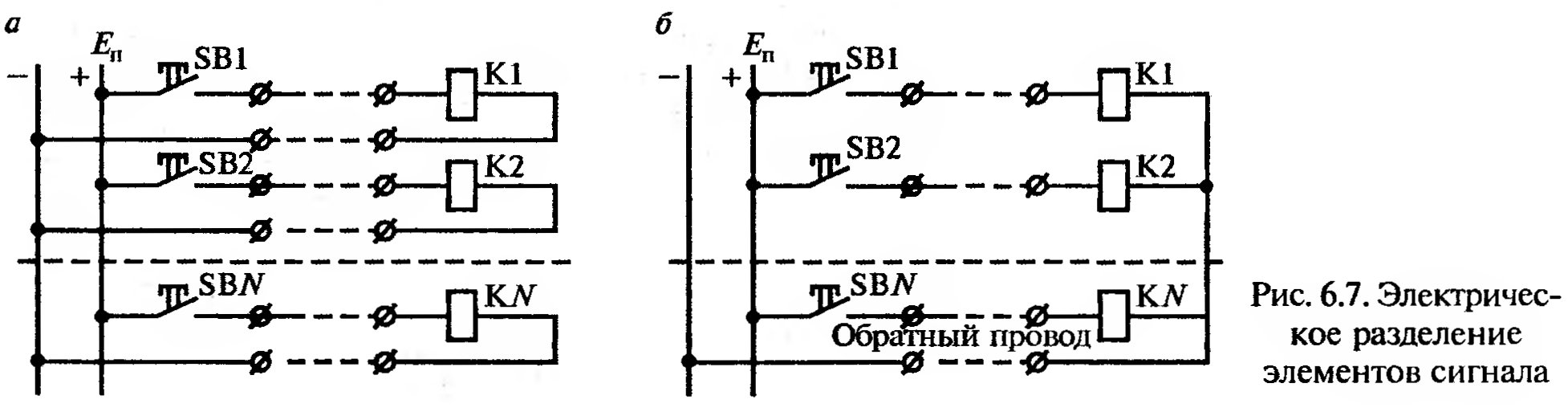
Мнемоническая схема (мнемосхема) (рис. 6.6) представляет собой наглядное графическое изображение функциональной схемы контролируемого пункта (на рис. 6.6 — подстанция 2), содержащее все элементы этой схемы, что позволяет оператору (диспетчеру) судить о состоянии оборудования на контролируемых пунктах, находящихся в его ведении, и оперативно принимать решения по управлению объектами на КП. Мнемосхема, таким образом, выполняет роль визуальной опоры информационного обеспечения системы диспетчерского управления. Выпускаемые в настоящее время диспетчерские щиты являются секционными мозаичного типа. Щиты мозаичного типа собираются из отдельных стандартных стоек, фасады которых облицовываются типовыми мозаичными элементами. На мозаичных элементах изображают различные детали мнемонической схемы, из которых она набирается, или крепятся аппараты сигнализации и квитирования (сигнальные ключи). Мозаичные элементы с изображенными на них мнемознаками могут легко извлекаться из гнезд в секциях щита, переставляться в другое место или заменяться другими элементами, что позволяет при необходимости оперативно изменять на щите мнемоническую схему любого КП, не нарушая внешнего вида щита и практически не выводя его из работы. Конструкция щитов типа ЩДСМ-1 (см. рис. 6.5) и аналогичных типов позволяет компоновать из отдельных секций шиты различной длины и допускает установку панелей в плане под углом друг к другу для улучшения обзора с рабочего места диспетчера. На столе диспетчера располагается пульт-манипулятор с кнопками управления и персональный компьютер. Наличие нескольких компьютеров, объединенных в локальную сеть, позволяет реализовать «виртуальный» энергодиспетчерский щит, отказавшись от громоздкого диспетчерского щита, составленного из отдельных панелей, количество которых зависит от сложности энергодиспетчерского круга. 6, 2 Разделение элементов сигнала при передаче Блоки разделения элементов сигнала РЭС (рис. 6.4) осуществляют отделение элементов кодовой комбинации для их независимой друг от друга передачи по линии связи. При этом элементы сигнала сохраняют свои параметры и не оказывают друг на друга искажающего влияния. Основными методами разделения каналов элементов сигналов являются: электрический (схемный), при котором каждый элемент кодовой комбинации передается по своей паре проводов; частотный, заключающийся в том, что каждый элемент передается на своей частоте, отличной от всех других; временной, основанный на поочередной передаче элементов сигнала в течение определенного периода времени. Электрическое разделение элементов сигнала рассмотрим на примере схем рис. 6.7. Приказ ТУ набирается диспетчерами путем нажатия кнопки SB1—SB7V на пульте управления. Каждой команде соответствует своя комбинация включенных кнопок. Через замкнутые контакты кнопок ток протекает по проводам линии связи на контролируемый пункт, где находятся реле К1—К/V, срабатывающие при протекании по их обмоткам тока. Срабатывают те реле, цепи которых замкнуты контактами кнопок. Через контакты сработавших реле замыкается цепь определенного объекта, которому соответствует комбинация включенных кнопок. В схеме рис. 6.7, а каждый элемент кодовой комбинации передается по своей паре проводов, а в схеме рис. 6.7, б — по одному проводу, а второй (обратный) провод является общим для всех элементов. Это дает экономию проводов, но такая схема связывает гальванически все цепи между собой, снижая надежность. При электрическом разделении требуется большое число проводов, передача информации на большое расстояние оказывается технически и экономически нерацио-
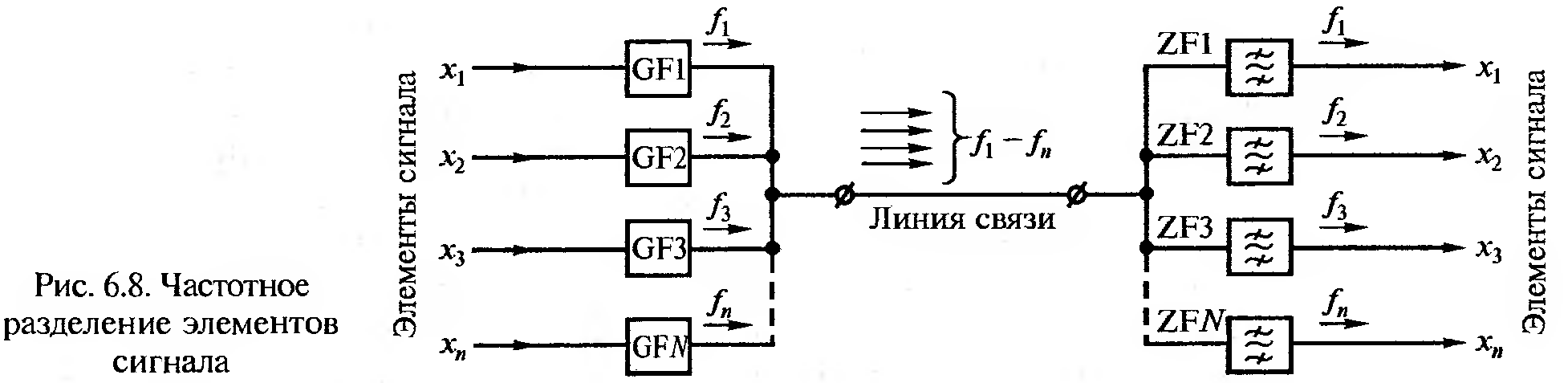
нальной. Поэтому такое разделение применяют только в тех случаях, когда передача осуществляется на небольшое расстояние, например, от одного узла устройства к другому или в системах дистанционного управления, когда дальность передачи не превышает нескольких сотен метров. Частотное разделение поясняется схемой на рис. 6.8. Сигнал в виде кодовой комбинации, состоящей из элементов, подается на передающее устройство, которое упрощенно представлено генераторами GF1— GFN. Каждый генератор работает на своей частоте f1—fn- Запускаются только те генераторы, на которые в соответствии с кодовой комбинацией подается питание. Элементы сигнала в виде токов определенных частот передаются по линии связи на приемное устройство, где установлены частотные полосовые фильтры ZF1— ZP N. Каждый фильтр пропускает только ток определенной частоты. На выходе приемного устройства появляется кодовая комбинация, состоящая из тех же элементов, что и на входе передающего устройства. Для передачи информации необходимо иметь столько частотных каналов (генераторов в передающем устройстве, фильтров в приемном устройстве), сколько имеется элементов сигнала (кодовой комбинации). Достоинством частотного разделения является использование для передачи информации одной двухпроводной линии связи в отличие от электрического разделения и одновременная передача всех элементов сигнала, как и при электрическом разделении. Недостатком частотного разделения можно считать необходимость использования для образования частотных каналов дорогой передающей и приемной аппаратуры. Временное разделение элементов сигнала получило широкое применение в системах телемеханики для передачи информации. При временном способе разделения каждому передаваемому элементу поочередно предоставляется линия связи на время, необходимое для его прохождения. В линии связи элемент существует независимо от других в течение отведенного для него времени и может быть выделен на приемной стороне. Последовательную передачу элементов осуществляют с помощью преобразователей параллельного кода в последовательный на передающей стороне, а обратное преобразование на приемной. В качестве преобразователей кода наиболее часто используют распределители импульсов.
На рис. 6.9, а представлена схема, поясняющая принцип временного разделения с помощью распределителей RG и RG1. При работе они должны переключаться синхронно, т.е. одновременно с одинаковой частотой и синфазно, т.е. в каждый момент времени они должны находиться в одноименных позициях. Так, когда распределители находятся на позиции 1, то передается первый элемент кодовой комбинации, на позиции 2 — второй элемент и т.д. Приемный распределитель находится в той же позиции, что и передающий, поэтому элемент сигнала в позиции 1 распределителей появится на первом выходе RG1, элемент х2 в позиции 2 — на втором выходе и т.д. На рис. 6.9, б показан процесс передачи четырехэлементной комбинации двоичного кода 1101 с помошью временной диаграммы. Распределители для этой передачи должны иметь не менее четырех позиций. Значению сигнала 1 будет соответствовать импульс, а значению 0 — отсутствие импульса в соответствующей позиции распределителя. На входы x+х2 и х4 распределителя RG подаются сигналы 1, а на вход х3 — сигнал 0. В позиции 1 распределителей по линии связи будет передан импульс, в позиции 2 — импульс, в позиции 3 — пауза (отсутствие импульса), в позиции 4 — импульс. Элементы кода поочередно поступают на распределитель RG1 и на выходах x1, х2, х3 и х4 появляются сигналы 1, 1, 0 и I. Таким образом, обеспечивается независимая передача каждого из элементов кодовой комбинации 1101. Достоинством временного разделения является использование для передачи информации одной двухпроводной линии связи как и при частотном разделении, но аппаратура каналов связи при временном разделении значительно проще и дешевле. Недостатком временного разделения является значительная длительность цикла передачи Tц информации, которая зависит от количества и продолжительности временных интервалов ∆ t. Tц= ∆ t*n (6.1) где п — количество временных интервалов (элементов сигнала). Таким образом, чем больше элементов содержится в кодовой комбинации, тем больше время передачи. Снизить время передачи можно за счет повышения быстродействия системы при переключении распределителей.
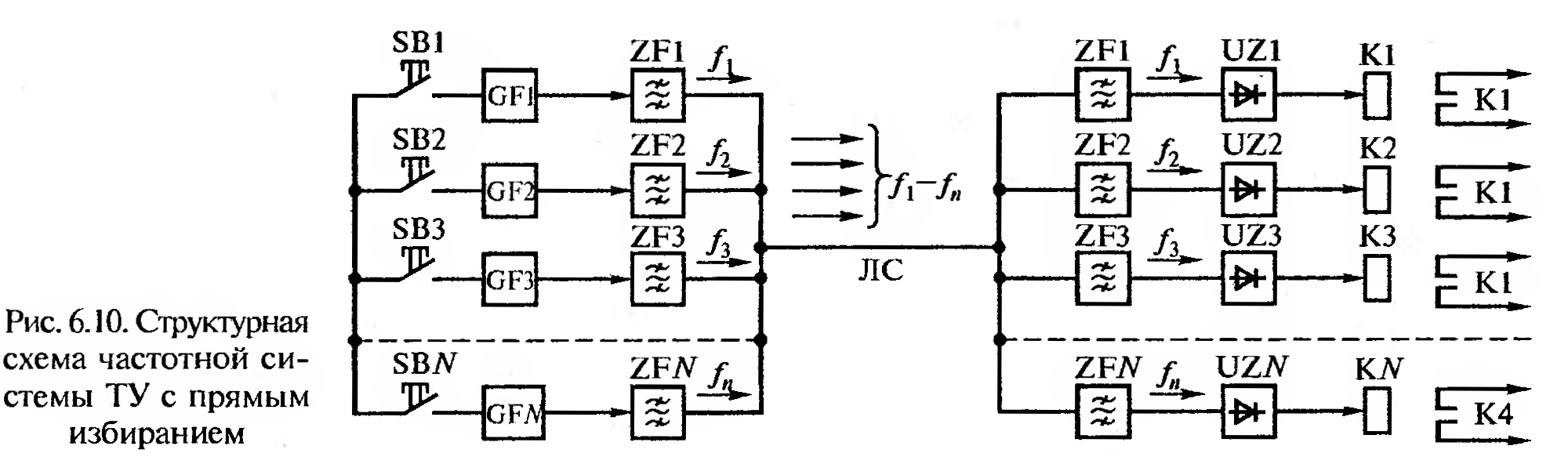
6.3 Методы избирания объектов телемеханики При передаче информации в системе телемеханического управления конечной целью является объект, на который она передается. Метод избирания (выбора) объекта в значительной мере влияет на принципы выполнения приемо-передающей аппаратуры. Различают три основных метода: прямой, групповой (адресный) и кодового избирания. Прямое избирание характеризуется тем, что сообщение передается одним элементом импульсной серии (импульсом или паузой определенного качества). На рис. 6.10 представлена структурная схема частотной системы телеуправления с прямым изображением. По каждому частотному каналу может передаваться одно сообщение. Всего система имеет N частотных каналов. На передающей стороне установлено N частотных генераторов GF, которые запускаются при нажатии кнопок SB. Нажатие каждой кнопки соответствует определенному сообщению (приказу). Например, нажатие кнопки SB 1 соответствует передаче приказа «Включить первый объект», при этом
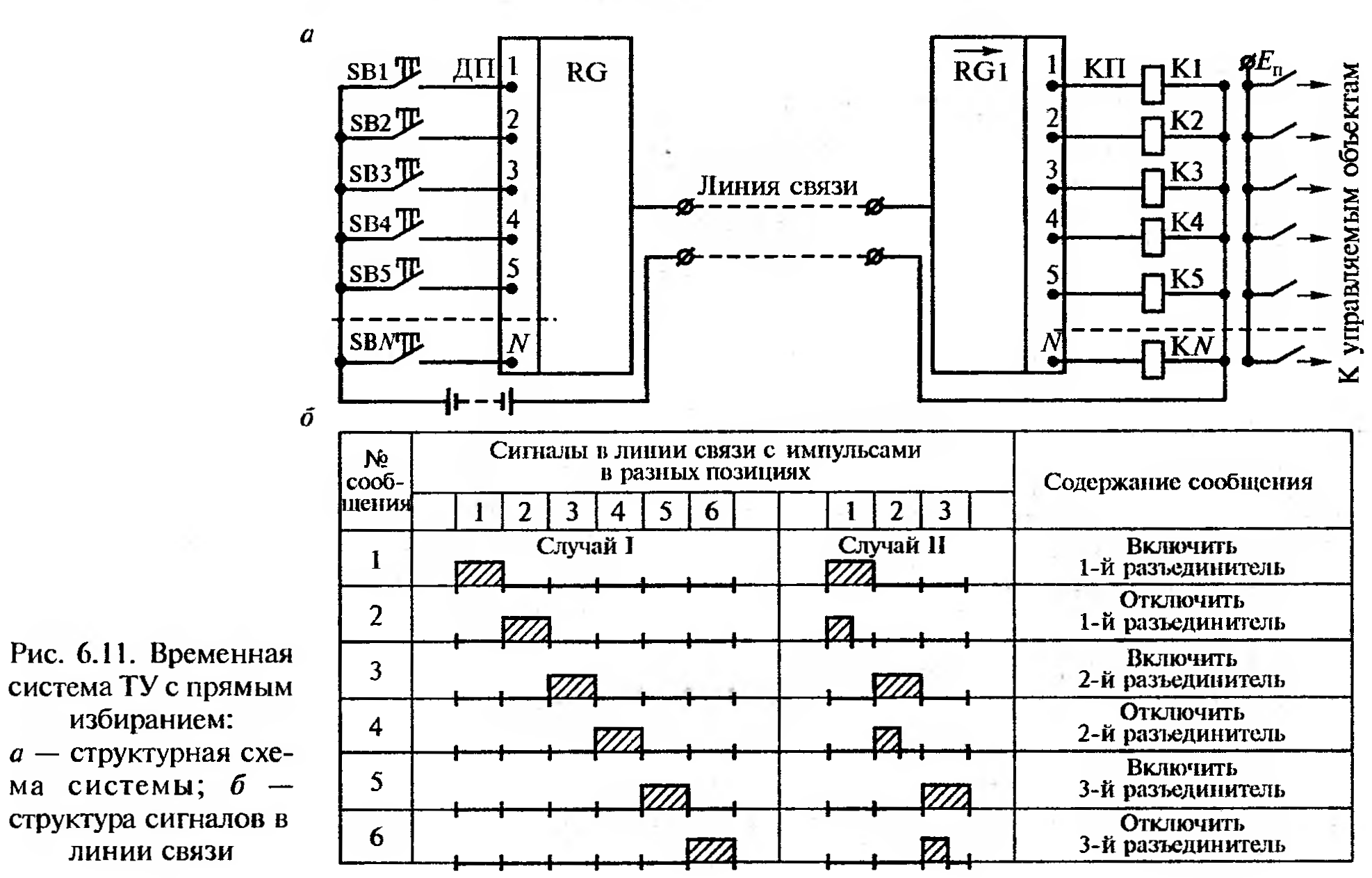
запускается частотный генератор GFI, вырабатывающий гармонические колебания частотой f1которые проходят через полосовой фильтр ZF1 и передаются по линии связи ЛС на контролируемый пункт. Частотный импульс пропускается фильтром ZF1 приемного устройства, с помощью выпрямителя UZ1 преобразуется в импульс постоянного тока и поступает на реле К1. Оно срабатывает и включает первый объект. Фильтр ZF1, установленный в передающем устройстве, необходим для того, чтобы исключить попадание в ЛС гармоник, возникающих при модуляции и лежащих вне полосы частот первого канала. Для передачи приказа «Отключить первый объект» необходимо нажать кнопку SB2 и запустить генератор GF2. Импульс частотой /2 пройдет по второму частотному каналу и в конечном итоге поступит на реле К2, которое отключит первый объект. Аналогичным образом можно осуществлять включение и отключение других объектов. Общее количество сообщений (команд), которые можно передать, пользуясь данной системой, соответствует числу частотных каналов N. За одну передачу можно передать все необходимые сообщения, предварительно набрав их нажатием определенных кнопок. Прямое избирание можно осуществить, используя систему с временным разделением элементов сигнала (рис. 6.11, а). В этой системе в передающем и приемном устройстве используются синхронно работающие распределители RG и RG1. Набор сообщений так-
же производится нажатием кнопок SB1—SBN. Когда распределители передающего ДП и приемного КП устройств находятся на первой позиции, идет передача первого сообщения при нажатой кнопке SB1, которая поступает на реле К1, замыкающего своим контактом исполнительную цепь. При переходе распределителей во вторую позицию может быть передано второе сообщение (рис. 6.11, б). За цикл переключений распределителей с позиции 1 до позиции N можно поочередно передать все необходимые сообщения. Можно несколько видоизменить систему, посылая на каждой позиции распределителя импульсы с разными качествами, каждому из которых будет соответствовать определенное сообщение. В этом случае номер импульса можно отождествить с номером объекта, а качеству придать значение операций («Включить—отключить»). Часто используют два качества длительности импульса: например, короткий и длинный импульс (рис. 6.11, б— случай II). Важным свойством системы телемеханики с прямым избиранием является передача каждого сообщения по независимому частотному или временному каналу связи при общей физической линии связи. Таким образом, системы с прямым избиранием являются многоканальными. При прямом избирании за один цикл передачи можно передать одно, два или все возможные сообщения. Это свойство системы называется циркулярностью. Исключением являются системы с временным разделением каналов, когда по одному каналу передается два и более сообщений с использованием двух и более качеств импульса, каждое из которых соответствует отдельному сообщению (рис. 6.11, б). В таких системах циркулярность соблюдается только в пределах числа сообщений, равного числу каналов. Сообщения передаются одним импульсом, поэтому время его передачи при частотном разделении определяется длительностью импульса и является минимально возможным. В системе с временным разделением даже при передаче одного сообщения распределитель должен сделать полный цикл переключений и опросить все позиции. Поэтому здесь можно говорить только о минимальном времени, затрачиваемом при циркулярной передаче на одну команду. Групповой (адресный) метод избирания заключается в выборе объекта в несколько приемов. Все сообщения разбиваются на группы. Наиболее часто в системах телеуправления сообщения делят на группы по виду выполняемых операций «Включить—отключить» (рис. 6.12). На контролируемом пункте при приеме команды «Включить» замыкается контакт реле Квкл, а команды «Отключить» — Коткл. При этом на шину включения или отключения поступает напряжение Еп от шины питания. После выбора номера объекта замыкаются контакты реле Kl, К2, КЗ или К4, причем один контакт от шины включения, другой — отключения. Питание подается в одну из выходных цепей 1—8 через два замыкающих контакта. Такое избирание называется одноступенчатым. При многоступенчатом групповом избирании сообщения делят на группы, группы — на подгруппы и т.д. Разделение осуществляется с целью уменьшения числа элементов сигнала.
Например, для передачи восьми сообщений при прямом избирании требуется сигнал, содержащий восемь элементов, и соответственно нужно восемь частотных или временных каналов связи. При групповом избирании для передачи тех же восьми сообщений, разбитых на две группы (рис. 6.12) требуется сигнал, содержащий шесть элементов (два для выбора группы, четыре для выбора объекта), и соответственно — шесть каналов связи. Наглядность экономии элементов сигнала и каналов связи возрастает при увеличении числа объектов управления. Допустим, требуется управлять десятью масляными включателями на тяговой подстанции. На каждый выключатель может быть передана команда «Включить» или «Отключить». Всего требуется передавать двадцать команд, которые можно разбить на две группы по десять команд. Для передачи двадцати команд в системе с прямым избиранием потребуется двадцать импульсов, двадцать каналов связи и двадцать выходных реле на КП. При использовании системы с одноступенчатым групповым избиранием необходимо иметь десять импульсов для выбора объекта и два импульса для выбора операции, т.е. требуется двенадцать импульсов, каналов и выходных реле. Применяют и многоступенчатое избирание. В системах телеуправления электрифицированных железных дорог все командные сообщения в пределах диспетчерского круга делятся между контролируемыми пунктами (первая ступень), внутри пункта — на группы. Так, например, в системе «Лисна-В» имеется четыре группы, в системе «Лисна-Ч» — пять групп. В каждой группе команды разбиваются по виду операции, а затем по объектам управления. При этом импульсная комбинация содержит элементы выбора КП, операции, объекта и группы. Так, в указанных выше системах выбор операции, объекта и группы осуществляется прямым избиранием, а КП — кодовым. Кодовое избирание характеризуется тем, что каждое сообщение передается определенной кодовой комбинацией. Может быть использован любой код, чаще предпочтение отдается двоичному коду на одно сочетание. На рис. 6.13, а приведена структурная схема кодовой системы телеуправления с частотным разделением элементов сигнала. В передающем устройстве команда набирается одной кнопкой из общего числа N. После нажатия кнопки SB команда подается на шифратор, где происходит преобразование кода на одно сочетание C1N нажата одна
кнопка из множества N) в код, с помощью которого команда на линии связи передается на приемное устройство. Каждый элемент кода передается по своему частотному каналу. Генераторы гармонических колебаний GF1 — GFN запускаются в соответствии с кодовой комбинацией, и частотные импульсы работающих генераторов проходят через частотные фильтры ZF1— ZFN в линию связи. На приемном устройстве каждый частотный импульс кодовой серии проходит через свой фильтр, поступает на преобразователь UZ, который преобразует его в импульс постоянного тока. Комбинация импульсов постоянного тока, аналогичная той, которая была на выходе шифратора, поступает на дешифратор, где расшифровывается, при этом на одном из его выходов, соответствующем номеру нажатой кнопки, появляется сигнал 1, который и поступает на соответствующее выходное реле К. На рис. 6.13, б представлен процесс преобразования сообщения при передаче его с передающего устройства на приемное. Например, для включения первого объекта необходимо нажать кнопку SB1. При этом на выходе шифратора появится кодовая комбинация 11000, т.е. на выходах 1 и 2 будут импульсы постоянного тока, на выходах 3, 4, 5 импульсы будут отсутствовать. Генераторы GF1 и GF2 при поступлении на их входы сигнала 1 запускаются и работают с частотами: GF1—f1GF2—f2. При нажатии другой кнопки будет передаваться другая кодовая комбинация, соответствующая другому сообщению. В каждой кодовой комбинации содержится два сиг-
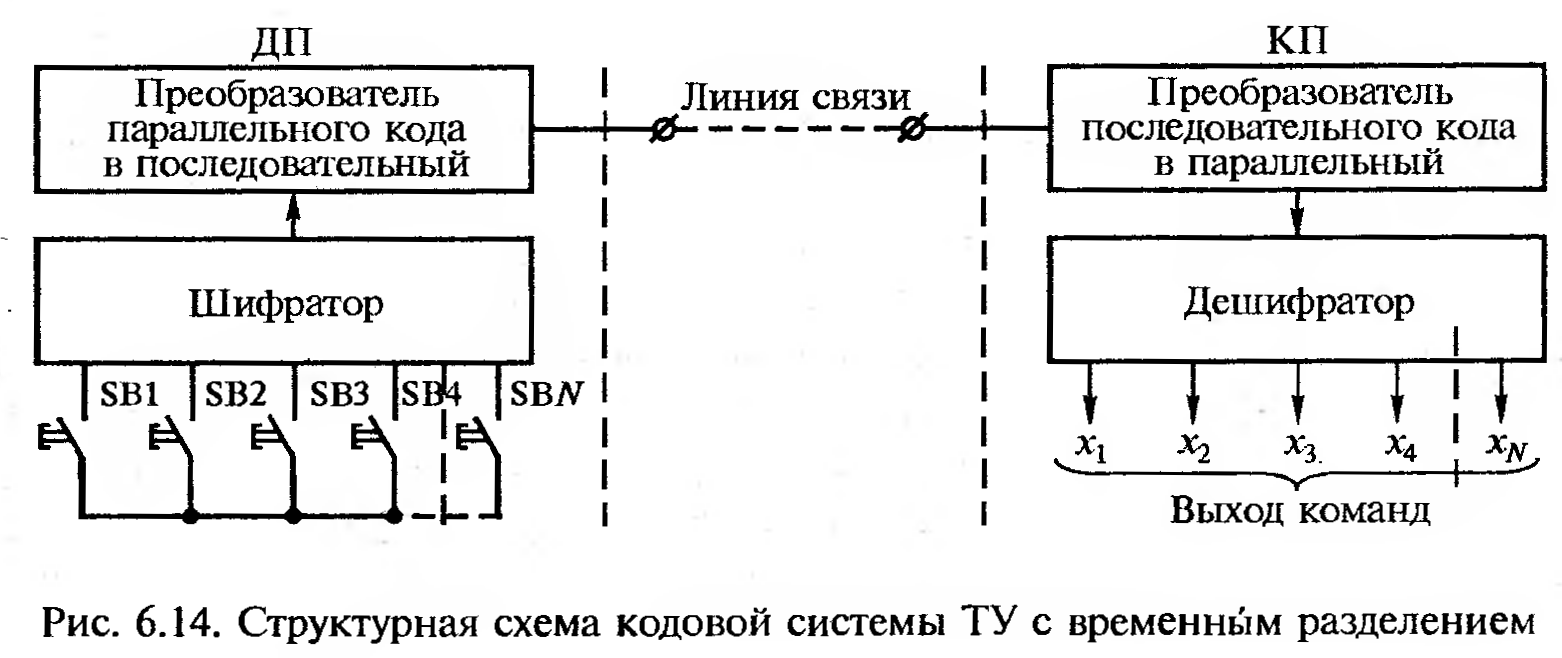
нала 1 и три — 0, т.е. используется двоичный код на одно сочетание С52 С помощью этого кода можно передать десять сообщений (С52 =5*4)/1*2). Кодовое избирание широко используется в системах с временным разделением элементов сигнала (рис. 6.14). В такой системе кодовая комбинация параллельного кода на выходе шифратора с помощью преобразователя, на который она поступает, преобразуется в соответствующую комбинацию последовательного кода. Все ее элементы поступают в линию связи поочередно во времени. На КП с помощью преобразователя происходит обратное преобразование последовательного кода в параллельный. Комбинация параллельного кода поступает на дешифратор, на одном из выходов которого x1 – xN появляется передаваемая команда. В кодовых системах за один цикл передачи можно передать только одну команду (сообщение), так как при одновременной передаче, например, двух кодовых комбинаций элементы одной невозможно отделить в приемном устройстве от элементов другой кодовой комбинации. Таким образом, кодовые системы не обладают свойствами цир- кулярности, а значит все сообщения в случае необходимости передаются поочередно. Полное время передачи всех сообщений в кодовых системах всегда больше, чем в системах с прямым избиранием. В частотных системах с прямым избиранием все команды можно передать одновременно по своему частотному каналу. Полное время передачи всех команд равно
времени передачи одной команды. В частотных кодовых системах одновременно передаются все элементы одной команды, а сами команды передаются поочередно, полное время их передачи равняется суммарному времени передачи всех команд. Время, затрачиваемое на передачу одного сообщения, в кодовых системах с временным разделением (кодово-распределительных) может быть существенно меньше, чем в системах с временным разделением и прямым избиранием, так как число позиций распределителей может существенно отличаться. На электрифицированных железных дорогах применяют системы телемеханики преимущественно с временным разделением элементов сигнала, так как в системах с частотным разделением используется сравнительно большое число достаточно сложных и дорогих элементов — генераторов, фильтров и др. Частотные системы телемеханики применяют только в тех случаях, когда число объектов на одном КП невелико (от одного до трех), например, в системах, предназначенных для телемеханизации рассредоточенных объектов. Если число объектов на КП превышает три, то более эффективны системы с временным разделением, так как стоимость распределителей в этом случае меньше стоимости генераторов и фильтров, а надежность их выше. Популярное:
|
Последнее изменение этой страницы: 2016-03-25; Просмотров: 4508; Нарушение авторского права страницы