
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Электромеханические усилители
Такие усилители, называемые чаще всего электромашинными усилителями (ЭМУ), предназначены для систем автоматизированного электропривода для управления работой двигателей постоянного тока, в том числе и тяговых двигателей локомотивов. Конструктивно ЭМУ представляют собой электрические машины, приводимые во вращение асинхронными двигателями или двигателями внутреннего сгорания, и фактически они являются генераторами постоянного тока. Самым простейшим ЭМУ является генератор постоянного тока (ГПТ) с независимой обмоткой возбуждения (рис. 3.9, а). Входным параметром подобного усилителя является ток управления ( Iу ) в обмотке возбуждения ОВ, (wу – количество витков этой обмотки), а выходной величиной ток в нагрузке, подключенной к якорю генератора, и протекающий под действием вырабатываемой генератором э.д.с. – Е. Коэффициент усиления такого усилителя невысок и составляет k ≤ 100, но его можно увеличить, если использовать дополнительную обмотку возбуждения, подключенную параллельно якорю так, чтобы её магнитный поток Фос по направлениюсовпал с магнитным потоком Фу (рис 3.9, б).
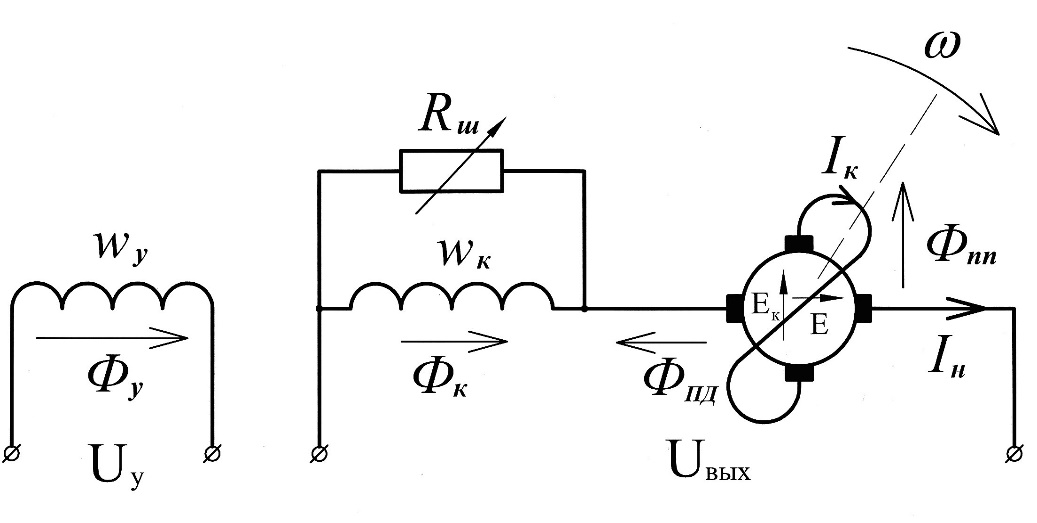
При этом суммарный поток увеличивается. Здесь параллельная обмотка возбуждения выполняет функцию элемента положительной обратной связи, за счет чего коэффициент усиления возрастает и может достигать k = 1000. В большинстве же случаев в качестве подобных усилителей используют специальные ЭМУ с поперечным магнитным полем (рис 3.10), представляющие собой совокупность ГПТ с короткозамкнутым якорем и несколькими обмотками возбуждения.
В конструкции такого генератора используются две пары щеток, расположенные перпендикулярно друг другу и при этом одна пара щеток закорочена. Это приводит к появлению в цепи якоря максимального тока короткого замыкания Iк, который создает поперечное магнитное поле Фпп в генераторе очень большой величины. В результате в якоре вырабатывается максимальная величина э.д.с. – Е , и выходной ток Iн, поступающий в нагрузку, значительно возрастает. Кроме этого, в цепи якоря и нагрузки включена специальная компенсационная обмотка wк, величину магнитного потока Фк которой можно изменять с помощью параллельно подключенного реостата Rш. Эта обмотка предназначена для компенсации продольного магнитного потока Фпд, создаваемого в якоре большим током нагрузки, и тем самым управлять внешней характеристикой ЭМУ в зависимости от величины этой нагрузки, устанавливая в ней оптимальный ток. Коэффициент усиления таких ЭМУ может достигать значения k = 10000. Заметим, что источником питания рассмотренных ЭМУ является механическая энергия, приложенная к вращающемуся якорю (w). Электрические усилители Электрические усилители, использующие в качестве источников питания электрическую энергию, подразделяются на магнитные и электронные усилители. Принципдействия магнитныхусилителей основан на изменении магнитной проницаемости m ферромагнитного сердечника с катушкой от величины подмагничивающего (управляющего) тока Iу, проходящего по этой катушке (рис. 3.11, а). Это изменение объясняется нелинейностью кривой намагничивания ферромагнитных материалов (рис. 3.11, б). Из графика (рис. 3.11, в) видно, что величина магнитной проницаемости, определяемая выражением
В качестве сердечников для магнитных усилителей используются такие материалы, как специальная трансформаторная сталь или пермаллой, обладающие высоким значением величины магнитной проницаемости m.. Простейший дроссельный магнитный усилитель (МУ) конструктивно (рис. 3.12, а) подобен трансформатору, т.к. у него помимо обмотки управления – wу имеется вторая обмотка wр – рабочая, подключенная последовательно с нагрузкой Rн к сети переменного тока. Величина тока нагрузки, определяемая выражением
Рассмотренный дроссельный магнитный усилитель обладает существенным недостатком. В его работе, при увеличении тока в нагрузке и соответственно создаваемого им магнитного потока Ф в сердечнике, в обмотке управления (согласно закону электромагнитной индукции) наводится переменная э.д.с., которая искажает ток управления, увеличивает потери и снижает к.п.д. такого усилителя.
Из всего этого можно заключить, что сигналом постоянного тока Iу небольшой мощности, подаваемым в обмотку управления магнитного усилителя, можно управлять относительно большой мощностью переменного тока Iн в нагрузке. Однако, анализируя статическую характеристику МУ, можно, с точки зрения требований к усилителям, отметить его основные недостатки: – статическая характеристика линейна только на небольшом рабочем участке от Iу1 до Iу2(рис. 3.12, б); – МУ имеет невысокий коэффициент усиления; – ток в нагрузке не зависит от полярности тока управления. Так, для определения полярности входного сигнала на оба сердечника вместе с обмоткой управления укладывается ещё одна – обмоткасмещения, на которую подается ток смещения от отдельного регулируемого источника питания. В результате, магнитный поток этой обмотки позволяет сместить характеристику МУ влево (рис. 3.14, а) и тогда при положительной полярности тока управления ток в нагрузке будет увеличиваться, а при отрицательной – уменьшаться (в пределах рабочего участка усилителя). Положение рабочей точки А усилителя устанавливается величиной тока в обмотке смещения. Для увеличения коэффициента усиления МУ, как правило, используется положительная обратная связь. Существуют различные способы её реализации, но в результате статическая характеристика усилителя изменяется (рис. 3.14, б), причём наклон её правой полуветви увеличивается, а левой – уменьшается, хотя при этом сокращается диапазон изменения входного сигнала. Следует заметить, что положительная обратная связь широко используется для создания на базе магнитных усилителей бесконтактных магнитных реле БМР (см. раздел 3.3. Реле).
Рассмотренные варианты МУ и схема усилителя (рис. 3.13) называется однотактной, и её главный недостаток – наличие тока в нагрузке даже при отсутствии входного сигнала, что в некоторых устройствах недопустимо. В таких случаях применяют двухтактные схемы МУ, что позволяет получить статическую характеристику более приближенную к идеальной на её рабочем участке. На рис. 3.15 представлено построение статической характеристики такого усилителя, состоящего из двух одинаковых однотактных усилителей с обмотками смещения (кривые 1 и 2 рис. 3.15). По результирующей характеристике такого МУ (кривая 3) видно, что коэффициент усиления двухтактного усилителя, при этом, увеличивается в два раза, расширяется рабочий участок усилителя, и полярность входного сигнала изменяет направление, то есть фазу переменного тока в нагрузке. Такое изменение фазы тока нагрузки обычно применяется в системах электропривода с асинхронными двигателями, используемыми в качестве исполнительных элементов.
Работа электронных усилителей основана на взаимодействии основных носителей электрического тока – электронов с магнитными и электрическими полями в различных электронных приборах и материалах. Для построения электронных усилителей используются самые различные усилительные и управляемые элементы, такие как: – электровакуумные приборы (электронные лампы), – газонаполненные приборы (тиратроны), – полупроводниковые приборы (транзисторы, тринисторы, интегральные микросхемы и т.п.). Многообразие электронных усилителей очень велико, поэтому в настоящем пособии остановимся на главном. Электронные усилители чаще других применяются в современных устройствах автоматики благодаря их высоким техническим параметрам и прекрасным характеристикам, минимальному потреблению энергии и небольшим габаритам и, самое главное, они практически безынерционны и поэтому лучше всего удовлетворяют тем требованиям, которые к усилителям предъявляются. Значительные успехи в развитии техники и, особенно, в области технологии полупроводниковых материалов позволили в последнее время почти полностью исключить использование электронных и ионных (газонаполненных) приборов в качестве усилительных элементов. К полупроводниковым приборам и элементам, используемым в современных усилителях, относятся: – полупроводниковые резисторы, реагирующие на многие внешние факторы (именно поэтому они нашли применение в качестве различных датчиков); – полупроводниковые вентили (диоды) и стабилитроны; – транзисторы, многообразие которых в настоящее время особенно велико (от маломощных до сильноточных, от низкочастотных до высокочастотных); – многослойные, в том числе и управляемые приборы, такие как динисторы, тиристоры (тринисторы), варисторы, семисторы и др.; – оптроны (оптико-электрические преобразователи); – интегральные микросхемы, представляющие собой кристаллы, в структуру которых включены различные комбинации всех выше перечисленных элементов и являющиеся основой различных узлов современных процессоров и компьютеров. Транзисторы были первыми усилительными элементами, пришедшими на смену электровакуумным приборам, и их сначала называли полупроводниковыми триодами (по аналогии с ламповыми триодами). Они представляют собой кристаллы (в основном из германия или кремния) с тремя чередующимися областями электронного n и дырочного р типов электрической проводимости, разделенные между собой двумя p-n переходами (рис. 3.16).
В автоматических системах широкое применение получили следующие разновидности усилителей: – усилители постоянного тока – для усиления медленно изменяющихся во времени входных сигналов; – апериодические (широкополосные) усилители – для усиления сигналов переменного тока в очень широком диапазоне частот. – резонансные (избирательные) усилители – для усиления входных сигналов только одной (определённой) частоты; – модулирующие усилители – для усиления и преобразования медленно изменяющегося сигнала в модулированное напряжение переменного тока высокой частоты; – фазочувствительные усилители – для усиления и фазочувствительного выпрямления сигналов переменного тока. Рассмотрим схему однокаскадного широкополосного усилителя на транзисторе VT (рис. 3.17). Его работу можно проследить с помощью графического построения основных характеристик используемого транзистора (рис. 3.18) и синусоидального входного сигнала.
Статическую характеристику электронного усилителя – зависимость Uвых = f(Uвх) принято называть амплитудной характеристикой (рис. 3.19, а), и она линейна на участке от 0 до Uвхтах, так как ограничена входной характеристикой транзистора и величиной источника питания Ек, а наклон её определяет величину коэффициента усиления. При необходимости получения большего усиления входного сигнала применяют последовательное включение двух и более подобных усилителей (каскадов), т.е. используют многокаскадные усилители.
Частотная характеристика рассмотренного усилителя представлена на рис. 3.19, б, и полоса пропускания его(f1 – f2) ограничена, в основном, величинами входной и выходной емкостей (Свх и Свых), а также частотными свойствами самого транзистора.
Величина максимального коэффициента усиления такого усилителя будет на частоте Такие резонансные усилители, совместно с модулирующими усилителями широко используются при частотном методе передачи информации (см. раздел 4. Элементы автоматики для передачи и приёма информации). Поскольку основным видом энергии на современном производстве является переменный ток (f = 50 Гц), то в системах управления различными приводными механизмами с электродвигателями и электромагнитами широко применяются фазочувствительные усилители (ФЧУ), схема одного из которых представлена на рис. 3.21.
В этом усилителе происходит сравнение фаз двух напряжений: входного сигнала Uвx и опорного напряжения Uon, являющегося источником питания. При фазе, т.е. полярности этих напряжений, показанных на схеме без скобок, выходное выпрямленное напряжение будет положительным, а его величина пропорциональна входному сигналу. При противоположных фазах этих напряжений – напряжение на выходе будет той же величины, но отрицательным. Фазочувствительные усилители очень широко применяются с индукционными датчиками переменного тока, например, с сельсинами, а также с индуктивными датчиками при дифференциальной схеме их включения. Реле Реле – это элемент автоматики, в котором при достижении входной величины определенного значения происходит скачкообразное изменение выходной величины. Статическая характеристика реле имеет ярко выраженный нелинейный характер и, в большинстве случаев, обладает гистерезисностью. Релейные элементы предназначены для автоматического включения и переключения электрических цепей под действием входного сигнала небольшой мощности и используются для самых различных целей: – для выявления предельных значений входной величины; – для усиления сигнала; – для изменения времени действия сигнала; – для переключения сигнала по различным каналам; – для одновременного управления несколькими объектами. Причем, это многообразие их применения позволяет отнести реле почти к каждой группе элементов автоматики, рассмотренных в первом разделе настоящего пособия. В зависимости от вида входной и выходной величин реле, как и другие элементы автоматики, можно разделить на: – механические (гидравлические и пневматические); – электрические (электромеханические и бесконтактные). В различных автоматических устройствах наибольшее применение получили именно электрические реле, и, в первую очередь конечно, электромеханические, по устройству и принципу действия которых их (аналогично с электроизмерительными приборами) можно подразделить на: – электромагнитные, – магнитоэлектрические, – электродинамические, – индукционные.
Рис. 3.22. Нейтральное электромагнитное реле: Входной величиной такого реле является ток, проходящий по его обмотке 1 под действием приложенного к ней напряжения, который создаёт в этой обмотке магнитное поле. Сердечник 2 , находящийся внутри этой катушки, вместе с ярмом 3 и подвижным якорем 4 образуют магнитную цепь (магнитопровод), по которой проходит созданный током магнитный поток. При этом якорь притягивается к сердечнику и, при своём движении, воздействует на контактную группу 5, производя замыкание верхних, нормально разомкнутых ( фронтовых ) контактов, и размыкание нижних, нормально замкнутых ( тыловых ) контактов. Выходной величиной рассмотренного реле необходимо считать ток, коммутируемый этими контактами в другой (вторичной) цепи, а величина этого тока зависит от того, что в этой цепи включено. Статической характеристикой реле, таким образом, является зависимость тока в цепи контактов (например, фронтовых) от величины тока, проходящего по его обмотке (рис. 3.23).
На большинстве электромагнитных реле устанавливается не одна, а несколько контактных групп, позволяя, тем самым, осуществлять управление разными электрическими цепями одновременно. Следует подчеркнуть, что для четкого и надежного срабатывания реле на его обмотку необходимо подавать напряжение, при котором ток в ней превышал бы ток срабатывания в 2…2, 5 раза. Величина этого напряжения, называемого рабочим, и тока срабатывания реле, как правило, указывается в паспортных данных на каждый тип реле. Изображенное на рис. 3.22.а электромагнитное реле называется нейтральным, т.к. его срабатывание не зависит от полярности подключенного к катушке напряжения и, следовательно, направления тока в ней. Для определения направления тока (полярности входного сигнала), проходящего по обмотке, применяют специальное поляризованное реле (рис. 3.24, а), в конструкции которого дополнительно используется постоянный магнит. При поступлении сигнала на обмотку такого реле происходит сравнение магнитного потока катушки, изображенного на рисунке, и магнитного потока постоянного магнита. Где эти потоки совпадают по направлению, якорь реле перемещается в эту сторону и замыкается соответствующая Электромагнитные реле получили наиболее широкое применение в автоматических устройствах для самых различных целей, как в промышленности, так и в быту, благодаря своей универсальности использования. Они могут работать в качестве датчиков для контроля параметров электрических сетей, использоваться как усилители в различных коммутационных и распределительных аппаратах и быть исполнительными устройствами в системах сигнализации и защиты. К недостаткам электромагнитных реле следует отнести их инерционность, обусловленную временными параметрами, и невысокую надёжность из-за наличия контактных групп и их преждевременного износа. Кроме этого, при коммутации контактов реле (по аналогии с контактными датчиками) создаётся высокий уровень электромагнитных помех. Наличие временных параметров у электромагнитных
В этом выражении t1 – постоянная времени обмотки реле при отпавшем якоре, зависящая от величины индуктивности катушки L1 при исходном положении якоря и активного сопротивления обмотки
– быстродействующие; – нормальнодействующие; – медленнодействующие. Кроме перечисленных видов реле, находят применение и, так называемые, реле времени, параметры срабатывания и отпускания которых могут регулироваться в широких пределах. Следует заметить, что временны́ е параметры электромагнитных реле широко использовались при создании первых логических схем для построения алгоритмов управления различными устройствами и механизмами, обеспечивая их работу в определённой последовательности. При этом необходимо было иметь возможность изменять и время срабатывания и время отпускания имеющихся в наличии типов электромагнитных реле. Путём подключения к обмоткам реле активных и реактивных элементов (например, конденсаторов), а также их различных комбинаций, можно в определённых пределах управлять временны́ ми параметрами. В большинстве случаев обмотки мощных реле, работающие на постоянном токе, а обмотки электромагнитов тем более, шунтируются полупроводниковыми диодами во встречном, по отношению к питающему току, включении (рис. 3.27).
Для исключения основного недостатка электромагнитных реле – наличия контактных групп, были разработаны схемы и конструкции бесконтактных реле. В первую очередь, на базе магнитных усилителей созданы, так называемые, БМР – бесконтактные магнитные реле, представляющие собой магнитные усилители с глубокой положительной обратной связью (см. рис. 3.14, б). Работу таких БМР можно пояснить графически по получаемой при этом характеристике, где за счёт глубокой положительной обратной связи наклон статической характеристики магнитного усилителя (её правой полуветви) удаетсяизменить настолько (рис. 3.28), что одной величине входного параметра (тока управления) соответствуют два значения тока в нагрузке. Поэтому ток нагрузки изменяется скачком от своего минимального значения до максимального при достижении тока управления величины Iy1, и уменьшается от максимума до минимума при достижении тока управления значения Iy2. Тем самым статическая характеристика магнитного усилителястановится релейной.
В дальнейших разработках компьютеров, как и во многих других цифровых устройствах, на смену ферриттранзисторным ячейкам пришли электронные бесконтактные реле на базе микроэлектроники. Основой этих реле является триггер – устройство, представляющее собой двухкаскадный усилитель на транзисторах с глубокой взаимной положительной обратной связью между каскадами (рис. 3.29).
При подключении источника питания к такому триггеру, происходит мгновенное открывание одного из транзисторов, а за счёт положительной обратной связи аналогичное запирание другого транзистора. В этой схеме оба транзистора работают в, так называемом, ключевом режиме, когда каждый из них либо полностью открыт (по нему проходит максимально допустимый ток), либо закрыт (ток через него отсутствует). Для того чтобы перевести схему в обратное состояние, т.е. закрыть первый и открыть второй транзисторы, достаточно подать на вход схемы короткий электрический импульс соответствующей полярности, и оба транзистора будут находиться уже в этом состоянии до прихода на вход триггера следующего импульса. Таким образом, рассмотренный триггер имеет два устойчивых состояния, как и любое реле. Подобные схемы, особенно при использовании высокочастотных транзисторов, обеспечивают значительно большее быстродействие по сравнению с другими релейными элементами. Именно поэтому на них строятся современные интегральные микросхемы и процессоры, широко применяемые в различных цифровых устройствах и компьютерах. Однако, в системах управления электроприводами, особенно силовыми, до настоящего времени в основном используются именно электромагнитные устройства и реле, позволяющие коммутировать достаточно мощные электрические цепи (см. вторую часть настоящего учебного пособия). Особое место среди контактных устройств занимают герконы (герметизированные контакты) (рис. 3.30), на основе которых строятся, так называемые, магнитоуправляемые реле. Герметизация контактов позволяет значительно повысить надежность их работы, т.к. это защищает контакты от вредного воздействия внешней среды.
Контакты геркона 2 выполняются из ферромагнитного материала (пермаллоя), и они, таким образом, являются одновременно и магнитопроводом. Концы контактов 3 покрыты тонким слоем (2…10 мкм) хорошо проводящего металла (серебра, золота, родия), и всё это находится в стеклянном миниатюрном баллончике 1, оснащенном токоотводами 4, внутри которого создан вакуум (в некоторых герконах дополнительно используется газовое наполнение). Внешнее магнитное поле создается либо катушкой 5, внутри которой находится геркон (именно так устроены магнитоуправляемые реле), либо с помощью постоянного магнита, который может располагаться рядом с герконом. Под действием его магнитного поля контакты геркона замыкаются, обеспечивая тем самым прохождение через них магнитных силовых линий и, соответственно, электрического тока в цепи самих контактов. Выпускаются герконы и с переключающими контактами. Современные магнитоуправляемые реле оснащаются одновременно несколькими герметизированными контактными группами, и подобные реле и герконы особенно широко применяются в системах автоматической защиты. Быстродействие герконов и магнитоуправляемых реле значительно выше других электромагнитных устройств за счёт отсутствия подвижного якоря и благодаря ничтожно малой массе самих контактов. Распределители Распределитель – это коммутационное устройство, предназначенное для последовательного переключения во времени разных электрических цепей. Они предназначены для автоматического подключения к одному блоку управления нескольких управляемых объектов, которые должны включаться в определенной последовательности. Наиболее распространенными являются: электромагнитные, релейные и электронные распределители. Электромагнитные распределители, часто называемые шаговыми искателями (рис. 3.31) , были самыми первыми устройствами автоматики, которые нашли применение на первых АТС (автоматических телефонных станциях).
Популярное:
|
Последнее изменение этой страницы: 2016-04-10; Просмотров: 1051; Нарушение авторского права страницы

 , изменяется и зависит от параметра Н0 , который создается в сердечнике током управления, проходящем по катушке.
, изменяется и зависит от параметра Н0 , который создается в сердечнике током управления, проходящем по катушке.
 , будет зависеть от тока в обмотке управления, потому что полное сопротивление цепи нагрузки
, будет зависеть от тока в обмотке управления, потому что полное сопротивление цепи нагрузки  зависит от её индуктивной составляющей, где L –индуктивность рабочей обмотки, а она пропорциональна величине магнитной проницаемости µ(рис. 3.11, в). В результате зависимость тока в нагрузке от величины тока управления, т.е. статическая характеристика такого усилителя, имеет обратный вид (рис. 3.12, б).
зависит от её индуктивной составляющей, где L –индуктивность рабочей обмотки, а она пропорциональна величине магнитной проницаемости µ(рис. 3.11, в). В результате зависимость тока в нагрузке от величины тока управления, т.е. статическая характеристика такого усилителя, имеет обратный вид (рис. 3.12, б).
 Поэтому, обычно, при изготовлении МУ используют два сердечника, которые охвачены одной общей обмоткой управления, а две рабочие обмотки, размещенные на каждом сердечнике отдельно, соединяются последовательно (рис. 3.13) или параллельно. При такой конструкции результирующий магнитный поток в обмотке управления отсутствует, но статическая характеристика остается прежней (рис. 3.12, б).
Поэтому, обычно, при изготовлении МУ используют два сердечника, которые охвачены одной общей обмоткой управления, а две рабочие обмотки, размещенные на каждом сердечнике отдельно, соединяются последовательно (рис. 3.13) или параллельно. При такой конструкции результирующий магнитный поток в обмотке управления отсутствует, но статическая характеристика остается прежней (рис. 3.12, б).
 В системах автоматики широкое применение получили магнитные усилители самых различных схем и модификаций. Их основное достоинство – это возможность питания вместе с нагрузкой, например, электромагниты и электродвигатели, непосредственно от сети переменного тока. Такие усилители применяются для усиления сигналов постоянного тока и, кроме этого, они имеют простую конструкцию и высокую надёжность. К недостаткам МУ следует отнести их существенную инерционность за счёт большой постоянной времени, определяемой, в основном, обмоткой управления, довольно узкую полосу пропускания частот и искажение входного сигнала из-за нелинейности характеристики сердечника, а также довольно значительные габариты и вес. По этой причине они совершенно не используются в звукотехнике.
В системах автоматики широкое применение получили магнитные усилители самых различных схем и модификаций. Их основное достоинство – это возможность питания вместе с нагрузкой, например, электромагниты и электродвигатели, непосредственно от сети переменного тока. Такие усилители применяются для усиления сигналов постоянного тока и, кроме этого, они имеют простую конструкцию и высокую надёжность. К недостаткам МУ следует отнести их существенную инерционность за счёт большой постоянной времени, определяемой, в основном, обмоткой управления, довольно узкую полосу пропускания частот и искажение входного сигнала из-за нелинейности характеристики сердечника, а также довольно значительные габариты и вес. По этой причине они совершенно не используются в звукотехнике. При изменении силы тока через один р-п переход происходит изменение электрического сопротивления другого р-п перехода, и, в результате, с помощью небольшого входного сигнала Iб (токав цепи базы транзистора) происходит управление значительно большим током, протекающим в цепи его коллектора Ik.
При изменении силы тока через один р-п переход происходит изменение электрического сопротивления другого р-п перехода, и, в результате, с помощью небольшого входного сигнала Iб (токав цепи базы транзистора) происходит управление значительно большим током, протекающим в цепи его коллектора Ik. 
 По входной характеристике транзистора – зависимости тока базы от напряжения на ней (кривая 1) при наличии входного сигнала (кривая 2) происходит синусоидальное изменение тока базы (кривая 3), которое через переходную характеристику транзистора (прямая 4) изменяет соответственно и ток коллектора (кривая 5). По выходным характеристикам транзистора 6 видно, как изменяется напряжение на коллекторе и на нагрузке, подключенной к нему через выходную ёмкость Свых (кривая 7). Таким образом, незначительное изменение входного сигнала приводит к существенному изменению выходного напряжения. Линия 8 представляет собой нагрузочную прямую, наклон которой зависит от сопротивления в цепи коллектора Rk и от величины напряжения источника питания Еk. Точка А является рабочей точкой усилителя, которая устанавливается величиной тока в цепи базы Iб с помощью резистора Rб.
По входной характеристике транзистора – зависимости тока базы от напряжения на ней (кривая 1) при наличии входного сигнала (кривая 2) происходит синусоидальное изменение тока базы (кривая 3), которое через переходную характеристику транзистора (прямая 4) изменяет соответственно и ток коллектора (кривая 5). По выходным характеристикам транзистора 6 видно, как изменяется напряжение на коллекторе и на нагрузке, подключенной к нему через выходную ёмкость Свых (кривая 7). Таким образом, незначительное изменение входного сигнала приводит к существенному изменению выходного напряжения. Линия 8 представляет собой нагрузочную прямую, наклон которой зависит от сопротивления в цепи коллектора Rk и от величины напряжения источника питания Еk. Точка А является рабочей точкой усилителя, которая устанавливается величиной тока в цепи базы Iб с помощью резистора Rб.
 Чтобы рассмотренный усилитель стал избирательным и имел резонансную частотную характеристику (рис. 3.8, б), необходимо в цепи коллектора в качестве нагрузки включить колебательный контур, состоящий из конденсатора и катушки индуктивности (рис. 3.20).
Чтобы рассмотренный усилитель стал избирательным и имел резонансную частотную характеристику (рис. 3.8, б), необходимо в цепи коллектора в качестве нагрузки включить колебательный контур, состоящий из конденсатора и катушки индуктивности (рис. 3.20). , т.е. определяться параметрами этого колебательного контура.
, т.е. определяться параметрами этого колебательного контура.

 Как видно из характеристики, она обладает гистерезисностью, то есть срабатывание реле происходит при одном значении тока в катушке, а отпускание – при другом. Величины токов срабатывания и отпускания (Iсраб и Iотп соответственно) являются электрическими параметрами реле, а различное их значение объясняется разной величиной магнитного сопротивления магнитопровода при отпавшем и при притянутом положении якоря реле. Поэтому для уменьшения этой разницы между сердечником и якорем часто размещают немагнитную прокладку 6, а для возвращения якоря реле в исходное положение при отсутствии тока в катушке, реле оснащается специальной возвратной пружиной.
Как видно из характеристики, она обладает гистерезисностью, то есть срабатывание реле происходит при одном значении тока в катушке, а отпускание – при другом. Величины токов срабатывания и отпускания (Iсраб и Iотп соответственно) являются электрическими параметрами реле, а различное их значение объясняется разной величиной магнитного сопротивления магнитопровода при отпавшем и при притянутом положении якоря реле. Поэтому для уменьшения этой разницы между сердечником и якорем часто размещают немагнитную прокладку 6, а для возвращения якоря реле в исходное положение при отсутствии тока в катушке, реле оснащается специальной возвратной пружиной. контактная группа. Подобные поляризованные реле обладают очень высокой чувствительностью, но существенным недостатком их является малая электрическая мощность, коммутируемая их контактами. Поэтому, чаще всего, сигналы с них используют для последующего управления более мощными электромагнитными реле или, вместо поляризованного реле, применяют специальную схему включения двух нейтральных электромагнитных реле требуемой мощности с выпрямительными диодами, изображенную на рис. 3.24, б.
контактная группа. Подобные поляризованные реле обладают очень высокой чувствительностью, но существенным недостатком их является малая электрическая мощность, коммутируемая их контактами. Поэтому, чаще всего, сигналы с них используют для последующего управления более мощными электромагнитными реле или, вместо поляризованного реле, применяют специальную схему включения двух нейтральных электромагнитных реле требуемой мощности с выпрямительными диодами, изображенную на рис. 3.24, б. реле обусловлено, главным образом, индуктивностью обмотки реле, в которой при подключении и отключении напряжения (при увеличении и уменьшении тока) возникает э.д.с. самоиндукции, которая направлена всегда навстречу изменению тока, проходящего по этой обмотке. На рис. 3.25 представлена эквивалентная схема катушки реле, где R – ее активное сопротивление, зависящее от длины и сечения провода, которым эта обмотка выполнена, а L –индуктивность, обусловленная количеством витков катушки и наличием магнитопровода в конструкции реле.
реле обусловлено, главным образом, индуктивностью обмотки реле, в которой при подключении и отключении напряжения (при увеличении и уменьшении тока) возникает э.д.с. самоиндукции, которая направлена всегда навстречу изменению тока, проходящего по этой обмотке. На рис. 3.25 представлена эквивалентная схема катушки реле, где R – ее активное сопротивление, зависящее от длины и сечения провода, которым эта обмотка выполнена, а L –индуктивность, обусловленная количеством витков катушки и наличием магнитопровода в конструкции реле. При подаче напряжения на вход такой цепи ключом В, по ней проходит ток i, который вызывает падение напряжения на активной составляющей этой цепи iR, а на индуктивности, согласно закону электромагнитной индукции, возникает э.д.с. самоиндукции eL = -Ldi/dt. По второму закону Кирхгофа можно записать уравнение равновесия электрической цепи U = iR-eL = iR + Ldi/dt и получить дифференциальное уравнение первого порядка, решая которое относительно тока получить следующее выражение
При подаче напряжения на вход такой цепи ключом В, по ней проходит ток i, который вызывает падение напряжения на активной составляющей этой цепи iR, а на индуктивности, согласно закону электромагнитной индукции, возникает э.д.с. самоиндукции eL = -Ldi/dt. По второму закону Кирхгофа можно записать уравнение равновесия электрической цепи U = iR-eL = iR + Ldi/dt и получить дифференциальное уравнение первого порядка, решая которое относительно тока получить следующее выражение  .
. . При размыкании ключа В – э.д.с. самоиндукции направлена на поддержание тока в катушке и его зависимость от времени определяется выражением
. При размыкании ключа В – э.д.с. самоиндукции направлена на поддержание тока в катушке и его зависимость от времени определяется выражением  , где t2 постоянная времени катушки при притянутом якоре, равная
, где t2 постоянная времени катушки при притянутом якоре, равная  , при этом L2 > L1.
, при этом L2 > L1. На рис. 3.26 показана временная зависимость тока в обмотке реле при включении (t = 0) и выключении (t = t1) ключа В, из которой видно, что срабатывание реле происходит только при достижении тока в обмотке значения Iсраб, определяемое промежутком времени tсраб, а отпускание реле – через интервал tотп, когда ток в обмотке уменьшится до значения Iотп. Эти величины (tсраб и tотп) и являются временными параметрами реле, по которым электромагнитные реле подразделяются на:
На рис. 3.26 показана временная зависимость тока в обмотке реле при включении (t = 0) и выключении (t = t1) ключа В, из которой видно, что срабатывание реле происходит только при достижении тока в обмотке значения Iсраб, определяемое промежутком времени tсраб, а отпускание реле – через интервал tотп, когда ток в обмотке уменьшится до значения Iотп. Эти величины (tсраб и tотп) и являются временными параметрами реле, по которым электромагнитные реле подразделяются на:  Это позволяет исключать повреждения и преждевременный выход из строя (за счёт возникающей, достаточно мощной электрической дуги) выключателей и других коммутационных изделий, с помощью которых производится подключение и особенно отключение обмоток этих электромагнитов и реле от источников питания. В этом случае диод, подключенный к обмотке, составляет вместе с ней контур, по которому и проходит довольно значительный по величине ток IL, возникающий за счёт э.д.с. самоиндукции, наводимой в катушке электромагнита или реле при их выключении.
Это позволяет исключать повреждения и преждевременный выход из строя (за счёт возникающей, достаточно мощной электрической дуги) выключателей и других коммутационных изделий, с помощью которых производится подключение и особенно отключение обмоток этих электромагнитов и реле от источников питания. В этом случае диод, подключенный к обмотке, составляет вместе с ней контур, по которому и проходит довольно значительный по величине ток IL, возникающий за счёт э.д.с. самоиндукции, наводимой в катушке электромагнита или реле при их выключении. В системах автоматики бесконтактные магнитные реле самых различных схем и модификацийполучили очень широкое применение. Это однотактные и двухтактные, однообмоточные и многообмоточные БМР, имеющие несколько рабочих обмоток. Но основным практическим применением БМР было их использование в схемах ЭВМ второго поколения. При этом в качестве сердечников таких реле стали применяться новые материалы, такие как ферриты, представляющие собой металлокерамику с очень высоким значением µ, с прямоугольной петлёй гистерезиса и имеющие очень незначительные габариты и вес.
В системах автоматики бесконтактные магнитные реле самых различных схем и модификацийполучили очень широкое применение. Это однотактные и двухтактные, однообмоточные и многообмоточные БМР, имеющие несколько рабочих обмоток. Но основным практическим применением БМР было их использование в схемах ЭВМ второго поколения. При этом в качестве сердечников таких реле стали применяться новые материалы, такие как ферриты, представляющие собой металлокерамику с очень высоким значением µ, с прямоугольной петлёй гистерезиса и имеющие очень незначительные габариты и вес.

 Принцип их работы аналогичен электромагнитному реле, но здесь электромагнитный привод от катушки с сердечником 1 через якорь 2 и толкатель 3 передается храповому колесу 4, управляющему подвижной щеткой 5. При этом щетка 5, выполняющая функции переключающего контакта, входит в поочередное соединение с рядом неподвижных контактов, расположенных на пути движения этой щетки. Количество неподвижных контактов 6 определяется числом управляемых объектов, а также конкретным типом используемого искателя. Стопорная пружина 7 исключает возможность обратного поворота храпового колеса и обеспечивает движение щетки только в одном направлении. Входным сигналом такого шагового искателя является электрический им
Принцип их работы аналогичен электромагнитному реле, но здесь электромагнитный привод от катушки с сердечником 1 через якорь 2 и толкатель 3 передается храповому колесу 4, управляющему подвижной щеткой 5. При этом щетка 5, выполняющая функции переключающего контакта, входит в поочередное соединение с рядом неподвижных контактов, расположенных на пути движения этой щетки. Количество неподвижных контактов 6 определяется числом управляемых объектов, а также конкретным типом используемого искателя. Стопорная пружина 7 исключает возможность обратного поворота храпового колеса и обеспечивает движение щетки только в одном направлении. Входным сигналом такого шагового искателя является электрический им