
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Классификация автоматических систем и их структураСтр 1 из 6Следующая ⇒
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ МУРМАНСКОЙ ОБЛАСТИ ГАОУ МО СПО «Мончегорский политехнический колледж» КОНТРОЛЬНАЯ РАБОТА по дисциплине: «Основы автоматики» Специальность 140448 " Техническая эксплуатация и обслуживание электрического и электромеханического оборудования (по отраслям)"
Методические указания предназначены для студентов заочной формы обучения по специальности 140448 «Техническая эксплуатация и обслуживание электрического и электромеханического оборудования» (по отраслям). В процессе обучения в МПК обучающиеся заочного отделения изучают курс «Основы автоматики». Автоматические и автоматизированные устройства, станки, линии находят достаточно широкое применение в производственном процессе предприятия. Для предприятия выпускаются серийно и успешно используются автоматизированные устройства. В настоящее время нет ни одного станка, машины, агрегата, используемого на производстве, где бы не применялись средства и не использовались принципы автоматики. Поэтому для успешного решения задач, выдвигаемым производством, современный техник должен наряду с глубокими знаниями технологии должен иметь определенный уровень знаний в области автоматики. Эти знания помогут специалисту рациональнее решать производственные задачи, совершенствовать технологический процесс, используя новейшие достижения науки и техники. Целью дисциплины является получение знаний обучающимися в области автоматизации производственного процесса. Обучающийся должен усвоить основные принципы и методы, используемой при автоматизации производства, изучить назначение, устройство и принцип действия средств автоматики, наиболее перспективных для данной отрасли, выполнять не сложные расчеты, связанные с вопросами автоматизации производства. Освоение курса складывается из самостоятельного изучения учебного материала, объем которого определяется программой, по учебникам, учебным пособиям, техническим журналам и другой специальной литературе, выполнения контрольных работ, выполнения практических работ во время экзаменационной сессии. Основным руководящим материалом при изучении курса является «Рабочая программа», утвержденная цикловой методической комиссией и заместителем директора по учебной работе колледжа. Поскольку основной формой обучения обучающихся заочного отделения является самостоятельная работа, в целях облегчения усвоения курса во время сессий проводятся лекционно-практические занятия объемом до 20 часов. Учебным планом предусмотрено также выполнение обучающимися практических работ (в пределах 8 часов). Самостоятельно должна быть выполнена контрольная работа. ТРЕБОВАНИЯ К ВЫПОЛНЕНИЮ И ОФОРМЛЕНИЮ КОНТРОЛЬНЫХ РАБОТ Методические указания для выполнения контрольных работ по курсу «Основы автоматики» составлены в соответствии с учебными планами подготовки техников заочного отделения. Прежде чем приступить к выполнению контрольной работы, нужно внимательно ознакомиться с данными указаниями. Несоблюдение этих указаний может стать причиной того, что работа не будет даже принята к рецензированию. Нужно помнить, что выполнение контрольных работ является важным элементом в изучении теоретического материала. Все задачи нужно решать самостоятельно, используя проработанный теоретический материал. Задачи и вопросы для контрольных работ по различным разделам курса помещены ниже. Требования, предъявляемые к оформлению контрольной работы: 1. Каждая работа выполняется в отдельной тетради или в электронном формате А4, на обложке которой должны быть написаны: фамилия, имя, отчество студента: домашний адрес, номер учебного шифра, желательно – контактный телефон. 2. На каждой странице должны быть оставлены поля шириной не менее 3 см для замечаний рецензента. 3. Текст, формулы и числовые раскладки должны быть написаны четко и аккуратно, без помарок. 4. Схемы и графики должны быть выполнены с помощью чертежных инструментов. 5. В литературе, изданной до 1985 года, встречаются условные обозначения по старым, не действующим ГОСТ. При выполнении контрольной работы следует пользоваться ЕСКД и ГОСТ, действующими в настоящее время. 6. При описании автоматизации технологического процесса, должно быть полностью объяснено назначение и взаимодействие всех элементов схемы. 7. В конце контрольной работы обязательно указать литературу, поставить дату выполнения работы и подписаться. 8. Если контрольная работа не зачтена, то все необходимые поправки должны быть сделаны в той же тетради после подписи рецензента. Общие указания к решению задач. Решения задач должны быть написаны разборчивым подчерком или отпечатаны на листах формата А4, ответы на поставленные вопросы должны быть четкими, ясными и подтверждены необходимыми схемами, расчетами, графиками, ссылками на используемую литературу с указанием соответствующих страниц. Общие указания к выполнению контрольной работы. В контрольных заданиях содержится 14 вариантов, по 2 вопроса в каждом и задача. Вариант выбирается в зависимости от шифра, присвоенного каждому обучающемуся. Ответ на вопрос должен содержать: 1.Полную формулировку вопроса. 2.Назначение и принцип действия контрольно-измерительного прибора, его схему, описание конструкции и принцип работы, диапазон измеряемых величин, класс точности, область применения. 3.Схемы и чертежи должны быть выполнены аккуратно с соблюдением всех требований. 4.Функциональная схема автоматизации (*) вычерчивается на отдельном листе (формата А4 или А3) в соответствии с требованиями ГОСТ и вклеивается в тетрадь. 5.В конце работы указывается список используемой литературы. Если работа выполнена неудовлетворительно, то обучающийся исправляет ее и предоставляет повторно. Работы, не соответствующие своему варианту, а также выполненные небрежно, не зачитываются и возвращаются студенту без рецензии.
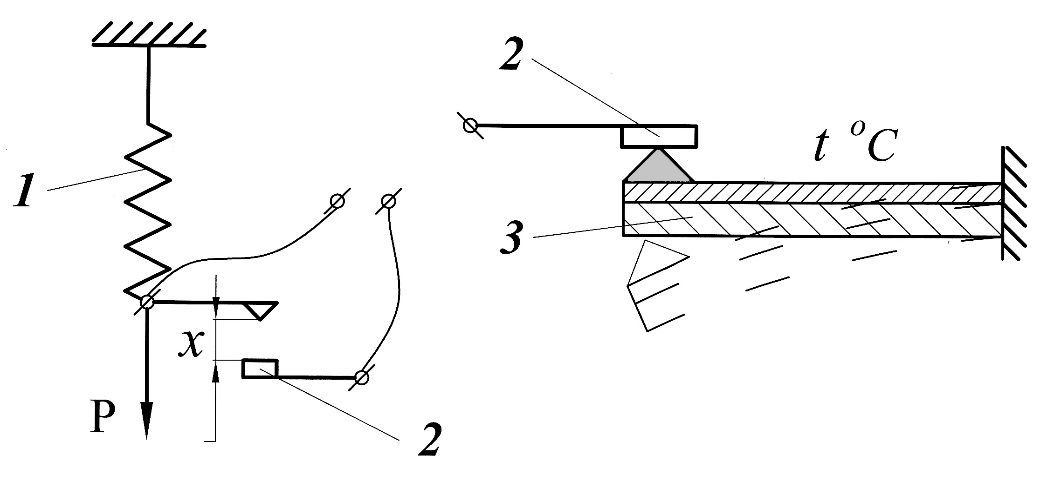
Введение Автоматизация в современном производстве играет огромную роль, т.к. при её использовании решаются следующие задачи: 1. Высвобождается труд человека; 2. Значительно сокращаются затраты энергии и материалов на изготовление продукции; 3. Повышается коэффициент использования основного оборудования; 4. Возрастает производительность труда за счёт увеличения скорости выполнения операций; 5. Улучшается качество выпускаемой продукции за счёт увеличения точности; 6. Обеспечивается выполнение работ и функционирование таких объектов, где непосредственное участие человека невозможно. Это, прежде всего, работа химических и энергетических установок из-за повышенной опасности; управление различными летательными аппаратами, в том числе и в освоении космоса, из-за значительной удалённости; и, наконец, контроль и управление быстро протекающих процессов, которые человек выполнить физически не способен. Кроме этого, автоматизация имеет огромное социальное значение: – изменяются условия и характер труда; – сокращается время выполнения работ за счёт увеличения производительности; – стираются границы физического и умственного труда; – использование ЭВМ – способствует повышению культуры умственного труда. История механизации и автоматизации уходит далеко в прошлое, но наиболее полно проявляется с развитием техники и, особенно с использованием электроэнергии начиная с XVIII века. Конец XVII и начало XVIII веков характеризуется первыми разработками механизмов и приборов с заложенными в них элементами автоматизации: Братьями Бажениными (Архангельск) была сооружена пильная самодействующая мельница. Механик Терентий Иванович Волосков (1729 – 1801) изготовил часы, производившие астрономические вычисления. 1742г. М.В. Ломоносов применил водяной привод насоса для подъёмной лебёдки. Изучая атмосферное электричество, он много работал над созданием метеорологических приборов. В 1759г. он изобрёл самопишущий компас, который представлял собой первый в мире автоматический регистрирующий прибор. 1763г. И.И. Ползунов создал промышленную двухцилиндровую паровую машину – первый двигатель для всеобщего применения на производстве. В 1765г. им был применен первый автоматический регулятор уровня воды в котле паровой машины, идея которого заложена в основу всех современных автоматических регуляторов. 1809г. В институте инженеров путей сообщения разработан проект плавучей землечерпалки мощностью 15 л.с., которая была построена на Ижорском заводе и являлась прообразом первого многоковшового экскаватора. В 1830г. инженером П.П. Мельниковым были разработаны теоретические основы гидромеханизации. Гидравлический метод нашел широкое применение в золотопромышленности. 1832г. Профессор П.Л. Шиллинг, изобретатель первого электромагнитного телеграфа, разработал для него первое релейное устройство для управления сигнальным звонком. В 1839г. академик Б.С. Якоби (изобретатель двигателя постоянного тока) создал первый электрический регистрирующий прибор, используемый в системах автоматического контроля. В 1842г. инженер К.И. Константинов его усовершенствовал, и важным событием было изобретение совместно с Б.С.Якоби импульсного устройства автоматического управления. В 1848г. инженером К.И.Константиновым был создан первый шаговый электродвигатель, являющийся прототипом современного шагового электромагнитного привода. С ростом объёмов железнодорожного строительства в России создаются различные путевые машины. Так, в 1862г. был построен первый специальный вагон с опрокидывающимся кузовом для перевозки балласта, а в 1880г. был применён первый в мире путеукладчик при строительстве Закаспийской железной дороги. В 1887г. инженером И.Н. Ливчаком был сконструирован и создан первый путеизмерительный вагон, а позднее в 1913 году по разработке Н.Е.Долгова построен путеизмерительный вагон усовершенствованной конструкции. 1874г. В.Н. Чиколев изобрёл электромашинный усилитель – основу современной электромашинной автоматики. В 1882г. инженер Н.И. Захаров продемонстрировал прототип современного устройства автоматического копирования – программный регулятор. 1895г. А.С. Попов (изобретатель радио) создал первенец радиотехники – грозоотметчик, в котором использовался им же изобретённый прибор для обнаружения и регистрации электромагнитных колебаний, а в 1898 году сделаны первые шаги в области телеуправления. Талантливый физик Н.Д. Пильчиков продемонстрировал во время своей публичной лекции в Одессе часы, модель семафора и маяка, которые приводились в действие радиосигналами. Нельзя не упомянуть и работы зарубежных учёных в развитии и разработке различных автоматических устройств. Это и английский учёный Дж.К. Максвелл («Трактат об электричестве и магнетизме»), который еще в 1868г. разработал основные принципы автоматического регулирования. Это и изобретение американским ученым А.Г. Беллом в 1876 году телефона. Это и изобретенный еще в 1784 году Уаттом механический центробежный регулятор скорости вращения, применяемый широко и до настоящего времени. Создание теории систем автоматического управления и регулирования относится ещё к 70-м годам XIX века и связано с именами таких русских учёных как И.А. Вышеградский, А.М. Ляпунов, Н.Е. Жуковский, П.Л. Чебышев. С ростом промышленности, транспорта, развитием электрификации и атомной энергетики разработки в области автоматизации находят все более широкое практическое применение, как за рубежом, так и в нашей стране. Последняя же треть ХХ века ознаменована громадными достижениями в области микроэлектроники, освоения космического пространства и создания совершенно новых приборов и технологий, которые успешно используются в настоящее время в строительстве и в путевом хозяйстве. 1. Основные понятия и определения В развитии автоматизации прослеживаются два основных направления: механизация и автоматизация Механизация – это замена мускульной силы человека машинами и механизмами. Автоматизация – применение приборов, приспособлений и машин, позволяющих осуществлять контроль и управление каким-либо процессом без участия человека. В обоих направлениях различают частичную, полную и комплексную механизацию и автоматизацию. Оба эти направления связаны друг с другом, причём автоматизация – является высшей ступенью механизации. Автоматика – это отрасль науки и техники, охватывающая теорию и принципы построения автоматических систем, практического их использования и применения для них необходимых технических средств. Телемеханика (от слова tele – даль, далеко) – это наука, которая изучает и создаёт устройства для контроля и управления на значительных расстояниях, используя различные линии связи как проводные, так и беспроводные, т.е. это – автоматика на расстоянии. При этом телемеханика решает и проблемы, связанные с помехозащищённостью устройств автоматики при больших протяжённостях используемых линий связи. Кибернетика – наука об общих законах получения, хранения, передачи и переработки информации в машинах, живых организмах и их объединениях. Она изучает то общее, что характерно для всех процессов управления, независимо от их физической природы. Кибернетика является теоретической основой автоматизации производства и объединяет три научных направления: 1. Теорию информации; 2. Теорию программирования; Теорию систем управления. Следует заметить, что длительное время кибернетика в нашей стране была вне закона (Толковый словарь 1954г. трактовал это понятие как реакционная лженаука). Ярчайший пример, когда политика вмешивается в науку. А ведь в конце 30-х годов в нашей стране велись значительные разработки в области генетики и кибернетики. Генетика – наука об информации, которая заложена в клетке и передаётся по наследству от растения к растению, от человека к человеку. Теория информации – это раздел кибернетики, в котором математическими методами изучают способы измерения различной информации. Информация – это сведения, передаваемые людьми, и не только, различными методами и способами. Это общее научное понятие, включающее в себя обмен сведениями между людьми, человеком и автоматом, автоматом и автоматом, обмен сигналами в животном и растительном мире, передача признаков от клетки к клетке, от человека к человеку. За единицу информации принимают количество её, содержащееся в случайной величине, принимающей с равной вероятностью два различных значения «да» и «нет», (0 – 1). Такая единица называется двоичной и называется 1 бит. 1 бит = log22, а 8 бит = 1 байт Количество информации на одно сообщение определяется как: I = log2m, где m – число возможных исходов события. Двоичная система связана с появлением такого элемента автоматики как реле, и первые ЭВМ строились именно на них. Параметрические датчики. Параметрические датчики по их устройству и принципу преобразования делятся на: а) контактные; б) реостатные; в) тензочувствительные; г) электролитические; д) термосопротивления; е) емкостные; ж) индуктивные; и) магнитоупругие и магнитострикционные; к) ионизационные. Принцип работы контактных датчиков основан на преобразовании механических перемещений (линейных или угловых) в электрический сигнал путём подключения или отключения источников питания к вторичной цепи (рис. 2.1). Причем входным параметром изображенных датчиков является в одном случае механическая нагрузка, а в другом – температура. Наибольшее применение контактные датчики нашли в качестве конечных выключателей, и они являются типичными представителями релейных элементов, т.к. их выходное сопротивление может принимать только два значения: 0 или ¥.
Основным недостатком контактных датчиков является их низкая надежность, т.к. при замыкании или размыкании контактов появляется электрическая дуга (искра), из-за которой сокращается срок службы контактов за счёт их окисления и разрушения, и при этом создаётся высокий уровень электромагнитных помех. Для исключения такого явления применяют различные методы гашения электрической дуги, используя специальные схемы и соответствующие конструкции самих контактов.
Рис. 2.2. Реостатные датчики: а – линейный; б – торроидальный В конструкции реостатов используются либо линейные формы каркасов (рис. 2.2, а), для которых входная величина хвх – линейное перемещение, либо – торроидальные (рис. 2.2, б), у которых входная величина хвх – угловое перемещение движка реостата. Обмотки проволочных реостатов выполняются из нихрома или специальных сплавов с высоким внутренним сопротивлением и малым температурным коэффициентом сопротивления. В некоторых случаях вместо обмотки используется графитовое покрытие. Обязательным условием использования этих датчиков является выполнение соотношения Rн> > R, т.е. входное сопротивление элементов, которые подключаются к датчику, должно быть значительно больше сопротивления реостата, в противном случае линейность статической характеристики датчика нарушается (рис. 2.3).
Питание реостатных датчиков может осуществляться от источников как постоянного, так и переменного тока. Реостатные датчики нашли довольно широкое применение, несмотря на наличие в их конструкции механического и электрического контакта между движком реостата и его обмоткой, несколько снижающего надежность работы такого датчика. Тензочувствительные датчики – это элементы, основанные на изменении электрического сопротивления проводников и полупроводниковых материалов при наличии в них деформации в пределах упругости. Принцип действия проволочных датчиков понятен из рисунка 2.5, а. В качестве таких датчиков наибольшее применение нашли: – проволочные, чувствительный элемент которых изготовлен из сплавов с высоким удельным электрическим сопротивлением, таких как манганин, нихром, константан; – угольные или графитовые (тензолит, прессугольный порошок) – полупроводниковые (PbS). Для практических целей используют специальную конструкцию проволочных датчиков (рис. 2.5, б), где тонкая манганиновая проволока 3 (Æ 0, 005 мм) укладывается специальным образом на тонкий изоляционный материал 2 (бумага, плёнка), с помощью которого датчик крепится (приклеивается) на исследуемую конструкцию или деталь 1, чтобы деформация детали полностью воспринималась чувствительным элементом датчика. Концы манганиновой проволоки приваривают к медным выводам 4 для дальнейшего подключения датчика к измерительным устройствам. При приложении механической нагрузки происходит деформация чувствительного элемента датчика – проволоки и при этом изменяется её электрическое сопротивление за счет изменения длины и сечения. Статическая характеристика датчика (зависимость относительного изменения сопротивления чувствительного элемента от его относительной деформации в пределах упругости) является линейной (рис. 2.5, в).
Чувствительность проволочного датчика, определяемая наклоном статической характеристики, невысока и составляет
Рис. 2.6. Угольный датчик давления: а – устройство; б – статическая характеристика Работа этого датчика основана на том, что при действии механической нагрузки – Р (сжатии) контактное сопротивление между частицами графитовых таблеток 2 и между самими таблетками в столбике уменьшается. Чувствительность подобных датчиков в десятки раз выше, чем у проволочных, а в случае применения полупроводниковых материалов (PbS) – даже в сотни раз. Основным недостатком всех рассмотренных тензодатчиков является наличие температурной погрешности, для компенсации которой применяются специальные методы, рассмотренные во второй части учебного пособия в разделе «Системы автоматического контроля». Тензочувствительные датчики широко применяются для измерения сил, ускорений, деформаций и вызванных ими механических напряжений в строительных конструкциях, а также для других целей, связанных с деформацией (в частности, при исследовании взаимодействия железнодорожного пути и подвижного состава, особенно при больших осевых нагрузках).
Электропроводность простой электролитической ячейки (рис. 2.7) определяется выражением Для исключения явления электролиза питание электролитических датчиков предпочтительно осуществлять переменным током низкой частоты (f = 50…300 Гц) Электролитические датчики применяются в качестве соленомеров для определения количества солей в водонагревательных установках, в измерителях кислотности (рН-метрах), в устройствах очистки воды для систем водоснабжения, в уровнемерах приемных резервуаров систем водоотведения, для измерения влажности воздуха, а также влажности неоднородных сред (сыпучих строительных материалов). Кроме этого, используя электропроводность воды, они в качестве контактных датчиков применяются для контроля уровня грунтовых вод в строительных котлованах для своевременной откачки из них грунтовых вод. На рис. 2.8 представлено устройство хлористо-литиевого датчика для измерения влажности воздуха, в котором за счёт насыщения влагой соли LiCl(за счет высокой гигроскопичности) меняется её проводимость. Соль наносится на изоляционную пластинку между электродами датчика, а по величине протекающего по ней тока можно определять измеряемый пар аметр – влажность окружающей среды.
Работа термосопротивлений основана на зависимости внутреннего сопротивления проводников (металлов) и полупроводниковых материалов от температуры, причем для металлов статическая характеристика датчика (рис. 2.9) в широком диапазоне температур – линейна (рис. 2.9, прямая 1) и описывается выражением
Чувствительность термосопротивлений на основе полупроводниковых материалов значительно выше, чем для металлов, но статическая характеристика их нелинейная (рис. 2.9, кривая 2), поэтому они применяются только в небольшом диапазоне изменения температуры, где нелинейностью характеристики можно пренебречь. Кроме этого, термисторы, как их часто называют, работоспособны только в диапазоне температур от –20 до +120°С, поэтому их практическое применение допустимо лишь в условиях окружающей человека среды. Например, они широко используются в цифровых полупроводниковых медицинских термометрах и во многих приборах, в которых необходимо поддерживать требуемую температуру. Металлические термосопротивления вследствие их конструктивного исполнения (рис. 2.10) имеют достаточно высокую инерционность, что является их существенным недостатком.
В качестве датчиков металлические термосопротивления нашли практическое применение в двух режимах их работы. Первый – это режим, при котором температура датчика определяется окружающими условиями и применяется в термометрах и психрометрах (измерителях влажности воздуха). Второй режим – режим нагрева датчика схемным током, при котором его температура определяется условиями теплоотдачи. В этом режиме через чувствительный элемент датчика – проволоку пропускается ток, который нагревает её до температуры t = 150…200°C. При этом отвод выделенного тепла зависит от среды, в которой находится проволока. Подобный режим работы термосопротивлений нашел применение в таких приборах как анемометры (измерители скорости воздушных потоков), вакуумметры и газоанализаторы, но конструктивные особенности исполнения этих датчиков отличаются от рассмотренных выше. Емкостные датчики конструктивно представляют собой электрический конденсатор (рис. 2.11, а).
Ёмкость конденсатора Это объясняется тем, что величина xc при питании датчика от сети (f = 50 Гц) соизмерима с сопротивлением изоляции и составляет при емкости датчика 100…150 пФ более 100 мОм. Поэтому, несмотря на максимальную простоту конструкции и безынерционность датчика, применение его связано с использованием сложной аппаратуры, работающей в области радиочастот (f = 1…10 МГц), а это высокочастотные мостовые схемы и резонансные усилители. Но все же, несмотря на это, емкостные датчики нашли практическое применение во влагомерах (e = var), уровнемерах и в угломерах (S = var) (рис. 2.11, б), а также в емкостных манометрах и микрофонах (a = var). Индуктивные датчики являются другой разновидностью реактивных элементов. Выходной величиной их является индуктивность и индуктивное сопротивление
Здесь m – магнитная проницаемость материала сердечника; m0 – магнитная проницаемость воздушного зазора; lc – средняя длина магнитной цепи ферромагнитного сердечника; d – величина воздушного зазора; S – площадь поперечного сечения сердечника. Индуктивность представленного на рисунке датчика будет изменяться за счет перемещения х якоря (S = var). В зависимости от конструкции сердечника это могут быть не только линейные, но и угловые перемещения. Достоинством индуктивных датчиков является простота конструкции, надежность и возможность питания непосредственно от сети переменного тока (f = 50 Гц). Но, в отличие от емкостных датчиков, их существенный недостаток – более высокая погрешность и малая точность из-за нелинейности статической характеристики сердечника (кривой намагничивания).
Магнитоупругие датчики конструктивно являются тоже индуктивными элементами (рис.2.14), но в них изменение индуктивности обусловлено определённым свойством ферромагнитных материалов при воздействии на них механических усилий. Деформация сердечника из такого материала в результате действия этих усилий приводит к изменению его магнитной проницаемости m, а, следовательно, и величины магнитного сопротивления.
Магнитоупругие датчики по своему применению аналогичны тензочувствительным датчикам, т.е. они также могут использоваться для измерения усилий (рис. 2.14, а), деформаций и вызванных ими механических напряжений (рис. 2.14, б). В качестве материала сердечников в них используется пермаллой, обладающий высоким значением магнитной проницаемости m. В магнитострикционных преобразователях используется обратное свойство ферромагнитных материалов – изменять свои геометрические размеры под воздействием внешних магнитных полей. Практическое применение обе разновидности этих датчиков получили в качестве ультразвуковых акустических излучателей и приемников при контроле механических свойств различных строительных материалов и конструкций. Принцип работы ионизационных датчиков основан на изменении электропроводности газов и жидкостей при воздействии на них облучения (ультрафиолетового, рентгеновского или гамма-излучения). Такие датчики используются для определения параметров этих излучений и конкретным примером применения подобных датчиков могут служить радиометры – приборы для измерения уровня радиации (счетчики Гейгера). Кроме этого, для измерения очень низких значений давления воздуха (до 1 пПа) эти датчики применяются в ионизационных вакуумметрах, в которых интенсивность ионизации газа пропорциональна измеряемому давлению. Генераторные датчики Генераторные датчики, предназначенные для преобразования неэлектрических величин непосредственно в электрическую активную величину, такую как э.д.с., напряжение или ток, делятся на: а) фотоэлектрические; б) термоэлектрические; в) пьезоэлектрические; г) индукционные; д) гальванические; е) датчики Холла. Работа фотоэлектрических датчиков основана на явлении фотоэффекта, который бывает трех видов: внешний, внутренний и вентильный. Фотоэффект – это появление свободных электронов в некоторых материалах при воздействии на них фотонов света. Явление фотоэффекта и его теоретическое обоснование было дано в 1888 году российским ученым, проф. А.Г. Столетовым. Если освободившиеся под воздействием света электроны остаются в веществе, изменяя при этом его электропроводность, то фотоэффект называется внутренним и на нём основана работа всех фоторезисторов. Если такие электроны покидают вещество, то фотоэффект называется внешним. На этом принципе работают вакуумные и газонаполненные фотоэлементы и фотоумножители. Следует заметить, что для работы перечисленных датчиков необходим источник питания. Помимо этого, различают вентильный фотоэффект, которым обладают полупроводниковые материалы. В них электроны из освещенного слоя материала переходят в неосвещенный, отделенный от него тонким запирающим слоем (p-n переходом). В результате между слоями вещества, ввиду недостатка электронов в одном слое и избытка их в другом, возникает разность потенциалов, т.е. появляется э.д.с., под действием которой по внешней цепи, подключенной к такому датчику, будет протекать электрический ток, который принято называть фототоком. Фотоэлементы с внешним фотоэффектом изготавливаются в виде электровакуумных приборов (электронных или ионных) и представляют собой стеклянный баллон с выкачанным изнутри воздухом (вакуумный фотоэлемент) и заполненный инертным газом (газонаполненный фотоэлемент). На внутреннюю поверхность баллона наносится тонкий слой сурьмяно-цезиевого покрытия, выполняющий функции фотокатода, перед которым располагается анод (рис 2.15, а). Под действием электрического поля электроны, вылетевшие с поверхности катода под воздействием фотонов света, устремляются к аноду, обуславливая, таким образом, протекание в цепи с фотоэлементом электрического тока. В газонаполненных приборах величина этого тока возрастает за счет ионизации находящегося в нем газа, т.е. они более чувствительны.
Рис. 2.15. Фотоэлектрические датчики: а – вакуумный фотодатчик; б – фоторезистор Все перечисленные фотодатчики характеризуются следующими основными характеристиками и параметрами: Световая характеристика – Iф = f(Ф) представляет зависимость фототока от величины светового потока. У вакуумных фотоэлементов световая характеристика линейная, что позволяет с высокой точностью измерять величины световых потоков. Интегральная чу Популярное:
|
Последнее изменение этой страницы: 2016-04-10; Просмотров: 651; Нарушение авторского права страницы



 .
.
 В электролитических датчиках используется зависимость электропроводности электролитов от его состава (концентрации) и геометрических параметров датчика.
В электролитических датчиках используется зависимость электропроводности электролитов от его состава (концентрации) и геометрических параметров датчика. , т.е. зависит от удельной электропроводности раствора c, площади электродов S, находящихся в растворе, и расстояния а между ними, при этом входной величиной такого датчика может быть любой из перечисленных параметров.
, т.е. зависит от удельной электропроводности раствора c, площади электродов S, находящихся в растворе, и расстояния а между ними, при этом входной величиной такого датчика может быть любой из перечисленных параметров.
 , где at – температурный коэффициент изменения сопротивления металла.
, где at – температурный коэффициент изменения сопротивления металла. В качестве материала проводников в термосопротивлениях используют чистые металлы, для которых величина at больше, чем для различных сплавов. Значение температурного коэффициента для таких металлов составляет at = (3, 7…6, 5)× 10-3 (град-1). Так для меди, ассортимент выпускаемых проводников которой наиболее широк, at=4, 3× 10-3 (град-1), т.е. изменение температуры на 10° вызывает изменение сопротивления медной проволоки на 4, 3%.
В качестве материала проводников в термосопротивлениях используют чистые металлы, для которых величина at больше, чем для различных сплавов. Значение температурного коэффициента для таких металлов составляет at = (3, 7…6, 5)× 10-3 (град-1). Так для меди, ассортимент выпускаемых проводников которой наиболее широк, at=4, 3× 10-3 (град-1), т.е. изменение температуры на 10° вызывает изменение сопротивления медной проволоки на 4, 3%.

 определяется тремя параметрами: площадью перекрытия пластин S, расстоянием между ними, а и величиной диэлектрической проницаемости используемого диэлектрика e, находящегося между пластинами. Входной величиной такого датчика может быть любой из перечисленных параметров, а выходной величиной – его реактивное (емкостное) сопротивление
определяется тремя параметрами: площадью перекрытия пластин S, расстоянием между ними, а и величиной диэлектрической проницаемости используемого диэлектрика e, находящегося между пластинами. Входной величиной такого датчика может быть любой из перечисленных параметров, а выходной величиной – его реактивное (емкостное) сопротивление  , для определения которого необходим источник питания переменного тока высокой частоты.
, для определения которого необходим источник питания переменного тока высокой частоты. , значение которого определяется измеряемой неэлектрической величиной. Конструктивно индуктивные датчики представляют собой катушку индуктивности с ферромагнитным сердечником (магнитопроводом) и подвижным якорем, являющимся частью этого магнитопровода (рис. 2.12).
, значение которого определяется измеряемой неэлектрической величиной. Конструктивно индуктивные датчики представляют собой катушку индуктивности с ферромагнитным сердечником (магнитопроводом) и подвижным якорем, являющимся частью этого магнитопровода (рис. 2.12). Величина индуктивности датчика определяется выражением
Величина индуктивности датчика определяется выражением  , где w – количество витков катушки, а Rм – магнитное сопротивление магнитопровода (сердечника и воздушного зазора), определяемое согласно выражению
, где w – количество витков катушки, а Rм – магнитное сопротивление магнитопровода (сердечника и воздушного зазора), определяемое согласно выражению  .
. Индуктивные датчики широко применяются в устройствах автоматики для измерения больших и малых перемещений (линейных и угловых), в манометрах, динамометрах, торсиометрах (измерителях моментов), уровнемерах, а также для контроля немагнитных покрытий стальных конструкций. Наиболее чувствительны дифференциальные индуктивные датчики, состоящие из двух одинаковых катушек, соединенных последовательно, и общего подвижного сердечника (рис. 2.13), позволяющие определять не только величину перемещения сердечника, но и его полярность (направление перемещения).
Индуктивные датчики широко применяются в устройствах автоматики для измерения больших и малых перемещений (линейных и угловых), в манометрах, динамометрах, торсиометрах (измерителях моментов), уровнемерах, а также для контроля немагнитных покрытий стальных конструкций. Наиболее чувствительны дифференциальные индуктивные датчики, состоящие из двух одинаковых катушек, соединенных последовательно, и общего подвижного сердечника (рис. 2.13), позволяющие определять не только величину перемещения сердечника, но и его полярность (направление перемещения).
