|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Передаточная функция П – регулятора
В динамическом отношении П – регуляторы представляют собой пропорциональное звено. Идеальные h(t) Реальный Интегральный регулятор. Уравнение И – регулятора
где Передаточная функция И – регулятора
В динамическом отношении И – регулятор аналогичен идеальному интегрирующему звену. Идеальный Реальный 5. Регуляторы Под законом регулирования понимают зависимость регулирующего воздействия на объект У (входная величина объекта) от отклонения ε (входная величина регулятора) регулируемой величины
В качестве величины регулирующего воздействия рассматривается перемещение регулирующего органа или выходного вала исполнительного механизма, выраженное в % полного перемещения. Если зависимость Закон регулирования является непрерывным, если математическая зависимость представляет собой непрерывную функцию, т.е. непрерывному изменению регулируемой величины соответствует непрерывное изменение регулирующего воздействия. Наиболее распространенными линейными законами регулирования, которые обычно реализуются в серийно выпускаемой аппаратуре и считаются типовыми, являются следующие: пропорциональный (П), интегральный (И), пропорционально – интегральный (ПИ), пропорционально – дифференциальный (ПД), пропорционально – интегрально – дифференциальный (ПИД) законы. Технические законы, реализующие законы регулирования, называются соответственно П -, И -, ПИ-, ПИД – регуляторами. Рассмотрим более подробно законы регулирования ПИ регулятор:
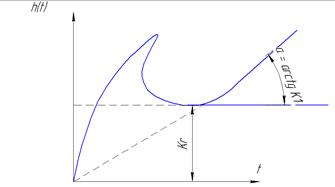
где Пропорционально – интегральный регулятор. Уравнение ПИ – регулятора имеет вид где Регулирующее воздействие ПИ – регулятора состоит из двух составляющих: пропорциональной Передаточная функция ПИ – регулятора
Идеальный Реальный 6. Пропорционально – дифференциальный регулятор. Уравнение ПД – регулятора
где Регулирующее воздействие состоит из двух составляющих: пропорциональной Передаточная функция ПД регулятора
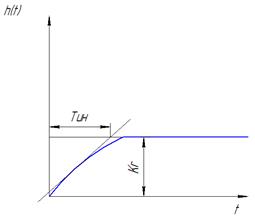
В динамическом отношении ПД - регулятор представляет собой параллельное соединение пропорционального и идеального дифференцирующего звеньев. Реальные регуляторы отличаются от идеальных инерционностью исполнительного механизма и других элементов. Реальный регулятор структурно можно представить последовательным соединением идеального регулятора и апериодического звена 1 –го порядка. Поэтому передаточная функция реального регулятора Wр(р) и передаточной функции инерционного апериодического звена 1 –го порядка 1/(ТинР+1): Wp(p)= Wp(p) Wин(p)= Wp(p)/ 1/(ТинР+1), Где Тин – постоянная времени инерционного звена. Идеальный Реальный 7.Пропорционально –интегрально -дифференциальный регулятор. Уравнение ПИД – регулятора У= Kp[ Регулирующее воздействие ПИД – регулятора складывается из воздействий, обусловленных работой П-, И-, Д – составляющих. В динамическом отношении ПИД – регулятор представляет собой представляет собой соединение из трех звеньев: пропорционального, идеального интегрирующего и идеального дифференцирующего. Передаточная функция ПИД – регулятора Wпид(р)= Реальные регуляторы отличаются от идеальных инерционностью исполнительного механизма и других элементов. Реальный регулятор структурно можно представить последовательным соединением идеального регулятора и апериодического звена 1 –го порядка. Поэтому передаточная функция реального регулятора Wр(р) и передаточной функции инерционного апериодического звена 1 –го порядка 1/(ТинР+1): Wp(p)= Wp(p) Wин(p)= Wp(p)/ 1/(ТинР+1), Где Тин – постоянная времени инерционного звена. Идеальный Реальный Популярное:
|
Последнее изменение этой страницы: 2016-04-10; Просмотров: 3102; Нарушение авторского права страницы
 (10.3)
(10.3) 
 (10.4)
(10.4)  - коэффициент передачи И – регулятора, имеющий размерность: % хода вала исполнительного механизма / единица измерения регулируемой величины, умноженная на секунду.
- коэффициент передачи И – регулятора, имеющий размерность: % хода вала исполнительного механизма / единица измерения регулируемой величины, умноженная на секунду. (10.5)
(10.5) 

 от заданного значения
от заданного значения  :
: 
 (10.2)
(10.2)  - коэффициент передачи, имеющий размерность: % хода вала исполнительного механизма / единица измерения регулируемой величины.
- коэффициент передачи, имеющий размерность: % хода вала исполнительного механизма / единица измерения регулируемой величины. (10.6)
(10.6)  - постоянная времени интегрирования.
- постоянная времени интегрирования. и интегральной
и интегральной  . В динамическом отношении ПИ – регулятор эквивалентен П – регулятору с коэффициентом передачи
. В динамическом отношении ПИ – регулятор эквивалентен П – регулятору с коэффициентом передачи  , включенном параллельно.
, включенном параллельно. (10.7)
(10.7) 

 (10.8)
(10.8)  - постоянная времени дифференцирования.
- постоянная времени дифференцирования.
 (10.9)
(10.9) 

 +(1/Tи)
+(1/Tи)  ]
]