|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Объекты регулирования и регуляторы.Стр 1 из 4Следующая ⇒
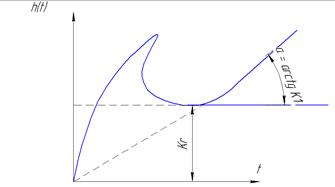
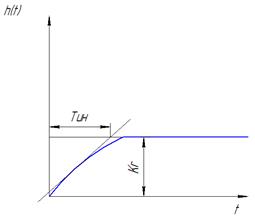
Объекты регулирования и регуляторы. Любая САУ состоит из двух частей – объекта регулирования и регулятора. Объект регулирования является важнейшей составной частью, от свойств которого зависят свойства и характеристики системы. Объект регулирования является неизменяемой частью системы, поскольку его характеристики определяются конструктивными и технологическими особенностями конкретного агрегата. свойства САУ: Нагрузка объекта — это расход регулирующей среды, используемой в объекте. Под регулирующей средой понимается вещество или энергия, изменение которых приводит к изменению регулируемой величины объекта. Так, при регулировании температуры печи регулирующей средой будет топливо или тепловая энергия, при регулировании уровня жидкости в емкости - жидкость. Чем раньше изменяется нагрузка, тем меньшим колебаниям подвергается регулируемая величина. Количество энергии или вещества, аккумулированное в объекте, называется емкостью объекта. Чем больше емкость, тем меньше скорость изменения регулируемой величины при одинаковом нарушении энергетического или материального баланса и наоборот. При малой емкости объекта регулируемая величина подвержена большим колебаниям и, следовательно, сложнее процесс регулирования. Иногда вместо емкости применяют понятие «коэффициент емкости», который означает количество энергии или вещества, вызывающее изменение регулируемой величины на единицу ее измерения. По порядку дифференциального уравнения объекты подразделяются на объекты первого, второго, ..., n-ного порядка. Иногда эти же объекты называют одноемкостными, двухъемкостными, ..., η -емкостными, причем «многоемкостность» — понятие условное и такие объекты не обязательно включают несколько одноемкостных объектов, только их динамика аналогична динамике объектов, j состоящих из отдельных емкостей. Самовыравнивание. В зависимости от того, как реагируют объекты на приложенные возмущения, различают объекты с самовыравниванием и без самовыравнивания. Самовыравниванием называют свойство объекта, благодаря которому возникшее нарушение энергетического или материального баланса ликвидируется самостоятельно без участия регулятора; при этом регулируемая величина стремится к новому установившемуся значению. Таким образом, самовыравнивание — это способность объекта к восстановлению равновесия, нарушенного в результате действия возмущений. Количественность - способность объекта к самовыравниванию характеризуется коэффициентом самовыравнивания Kc — величиной, обратной коэффициенту передачи объекта Kоб по каналу возмущающего воздействия, т. е. /Kс = 1/Kоб· Объекты регулирования, обладающие самовыравниванием (Kc > 0), относятся к устойчивым или статическим объектам. Эти объекты могут быть представлены апериодическими звеньями первого или второго порядков и их комбинациями. При Kc Объекты без самовыравнивания, в которых приложенное ступенчатое возмущение приводит к неограниченному изменению регулируемой величины, называются -.неустойчивыми или астатическими. Такие объекты содержат в своей структуре интегрирующие звенья.
Передаточная функция П – регулятора
В динамическом отношении П – регуляторы представляют собой пропорциональное звено. Идеальные h(t) Реальный Интегральный регулятор. Уравнение И – регулятора
где Передаточная функция И – регулятора
В динамическом отношении И – регулятор аналогичен идеальному интегрирующему звену. Идеальный Реальный 5. Регуляторы Под законом регулирования понимают зависимость регулирующего воздействия на объект У (входная величина объекта) от отклонения ε (входная величина регулятора) регулируемой величины
В качестве величины регулирующего воздействия рассматривается перемещение регулирующего органа или выходного вала исполнительного механизма, выраженное в % полного перемещения. Если зависимость Закон регулирования является непрерывным, если математическая зависимость представляет собой непрерывную функцию, т.е. непрерывному изменению регулируемой величины соответствует непрерывное изменение регулирующего воздействия. Наиболее распространенными линейными законами регулирования, которые обычно реализуются в серийно выпускаемой аппаратуре и считаются типовыми, являются следующие: пропорциональный (П), интегральный (И), пропорционально – интегральный (ПИ), пропорционально – дифференциальный (ПД), пропорционально – интегрально – дифференциальный (ПИД) законы. Технические законы, реализующие законы регулирования, называются соответственно П -, И -, ПИ-, ПИД – регуляторами. Рассмотрим более подробно законы регулирования ПИ регулятор:
где Пропорционально – интегральный регулятор. Уравнение ПИ – регулятора имеет вид где Регулирующее воздействие ПИ – регулятора состоит из двух составляющих: пропорциональной Передаточная функция ПИ – регулятора
Идеальный Реальный 6. Пропорционально – дифференциальный регулятор. Уравнение ПД – регулятора
где Регулирующее воздействие состоит из двух составляющих: пропорциональной Передаточная функция ПД регулятора
В динамическом отношении ПД - регулятор представляет собой параллельное соединение пропорционального и идеального дифференцирующего звеньев. Реальные регуляторы отличаются от идеальных инерционностью исполнительного механизма и других элементов. Реальный регулятор структурно можно представить последовательным соединением идеального регулятора и апериодического звена 1 –го порядка. Поэтому передаточная функция реального регулятора Wр(р) и передаточной функции инерционного апериодического звена 1 –го порядка 1/(ТинР+1): Wp(p)= Wp(p) Wин(p)= Wp(p)/ 1/(ТинР+1), Где Тин – постоянная времени инерционного звена. Идеальный Реальный 7.Пропорционально –интегрально -дифференциальный регулятор. Уравнение ПИД – регулятора У= Kp[ Регулирующее воздействие ПИД – регулятора складывается из воздействий, обусловленных работой П-, И-, Д – составляющих. В динамическом отношении ПИД – регулятор представляет собой представляет собой соединение из трех звеньев: пропорционального, идеального интегрирующего и идеального дифференцирующего. Передаточная функция ПИД – регулятора Wпид(р)= Реальные регуляторы отличаются от идеальных инерционностью исполнительного механизма и других элементов. Реальный регулятор структурно можно представить последовательным соединением идеального регулятора и апериодического звена 1 –го порядка. Поэтому передаточная функция реального регулятора Wр(р) и передаточной функции инерционного апериодического звена 1 –го порядка 1/(ТинР+1): Wp(p)= Wp(p) Wин(p)= Wp(p)/ 1/(ТинР+1), Где Тин – постоянная времени инерционного звена. Идеальный Реальный 23. Объекты регулирования и регуляторы. Любая САУ состоит из двух частей – объекта регулирования и регулятора. Объект регулирования является важнейшей составной частью, от свойств которого зависят свойства и характеристики системы. Объект регулирования является неизменяемой частью системы, поскольку его характеристики определяются конструктивными и технологическими особенностями конкретного агрегата. свойства САУ: Нагрузка объекта — это расход регулирующей среды, используемой в объекте. Под регулирующей средой понимается вещество или энергия, изменение которых приводит к изменению регулируемой величины объекта. Так, при регулировании температуры печи регулирующей средой будет топливо или тепловая энергия, при регулировании уровня жидкости в емкости - жидкость. Чем раньше изменяется нагрузка, тем меньшим колебаниям подвергается регулируемая величина. Количество энергии или вещества, аккумулированное в объекте, называется емкостью объекта. Чем больше емкость, тем меньше скорость изменения регулируемой величины при одинаковом нарушении энергетического или материального баланса и наоборот. При малой емкости объекта регулируемая величина подвержена большим колебаниям и, следовательно, сложнее процесс регулирования. Иногда вместо емкости применяют понятие «коэффициент емкости», который означает количество энергии или вещества, вызывающее изменение регулируемой величины на единицу ее измерения. По порядку дифференциального уравнения объекты подразделяются на объекты первого, второго, ..., n-ного порядка. Иногда эти же объекты называют одноемкостными, двухъемкостными, ..., η -емкостными, причем «многоемкостность» — понятие условное и такие объекты не обязательно включают несколько одноемкостных объектов, только их динамика аналогична динамике объектов, j состоящих из отдельных емкостей. Самовыравнивание. В зависимости от того, как реагируют объекты на приложенные возмущения, различают объекты с самовыравниванием и без самовыравнивания. Самовыравниванием называют свойство объекта, благодаря которому возникшее нарушение энергетического или материального баланса ликвидируется самостоятельно без участия регулятора; при этом регулируемая величина стремится к новому установившемуся значению. Таким образом, самовыравнивание — это способность объекта к восстановлению равновесия, нарушенного в результате действия возмущений. Количественность - способность объекта к самовыравниванию характеризуется коэффициентом самовыравнивания Kc — величиной, обратной коэффициенту передачи объекта Kоб по каналу возмущающего воздействия, т. е. /Kс = 1/Kоб· Объекты регулирования, обладающие самовыравниванием (Kc > 0), относятся к устойчивым или статическим объектам. Эти объекты могут быть представлены апериодическими звеньями первого или второго порядков и их комбинациями. При Kc Объекты без самовыравнивания, в которых приложенное ступенчатое возмущение приводит к неограниченному изменению регулируемой величины, называются -.неустойчивыми или астатическими. Такие объекты содержат в своей структуре интегрирующие звенья.
Популярное:
|
Последнее изменение этой страницы: 2016-04-10; Просмотров: 1836; Нарушение авторского права страницы
 объекты регулирования обладают настолько высоким коэффициентом самовыравнивания, что в автоматическом регулировании не нуждаются. В большинстве случаев коэффициент самовыравнивания зависит от нагрузки объекта.
объекты регулирования обладают настолько высоким коэффициентом самовыравнивания, что в автоматическом регулировании не нуждаются. В большинстве случаев коэффициент самовыравнивания зависит от нагрузки объекта. (10.3)
(10.3) 
 (10.4)
(10.4)  - коэффициент передачи И – регулятора, имеющий размерность: % хода вала исполнительного механизма / единица измерения регулируемой величины, умноженная на секунду.
- коэффициент передачи И – регулятора, имеющий размерность: % хода вала исполнительного механизма / единица измерения регулируемой величины, умноженная на секунду. (10.5)
(10.5) 

 от заданного значения
от заданного значения  :
: 
 (10.2)
(10.2)  - коэффициент передачи, имеющий размерность: % хода вала исполнительного механизма / единица измерения регулируемой величины.
- коэффициент передачи, имеющий размерность: % хода вала исполнительного механизма / единица измерения регулируемой величины. (10.6)
(10.6)  - постоянная времени интегрирования.
- постоянная времени интегрирования. и интегральной
и интегральной  . В динамическом отношении ПИ – регулятор эквивалентен П – регулятору с коэффициентом передачи
. В динамическом отношении ПИ – регулятор эквивалентен П – регулятору с коэффициентом передачи  , включенном параллельно.
, включенном параллельно. (10.7)
(10.7) 

 (10.8)
(10.8)  - постоянная времени дифференцирования.
- постоянная времени дифференцирования.
 (10.9)
(10.9) 

 +(1/Tи)
+(1/Tи)  ]
]