|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Выбор закона регулирования и параметров настройки регулятора ⇐ ПредыдущаяСтр 4 из 4
Основными факторами, определяющими законы регулирования и его настройки, являются статические и динамические характеристики объекта регулирования и требования технологии к качеству регулирования. Если объект представляется в виде последовательного соединения апериодического звена и звена чистого запаздывания, то характеристиками объекта являются коэффициент передачи Тип регулятора выбирают исходя из значений отношения τ об /Тоб: Тип регулятора...... Релейный Непрерывный Импульсный (линейный) τ об /Тоб..............< 0, 2 Существует ряд методов расчета регуляторов (определение их настроек) на заданное качество регулирования, однако на практике, из множества возможных переходных процессов выбирают три типовых процесса: апериодический процесс с минимальным временем регулирования (а), колебательный процесс с перерегулирования Для выбора закона регулирования и расчета настроек регулятора необходимо знать: 1) параметры объекта регулирования 2) максимально возможное возмущение в системе со стороны регулирующего органа В зависимости от технологических требований выбирают тип переходного процесса: 1) допустимое время регулирования Затем рассчитывают динамический коэффициент регулирования: На номограммах с координатами Таблица 10.3 Формулы для определения настроек регуляторов на статических объектах
После этого производится проверка времени регулирования 12. Корректирующие устройства и их применение Качество процессов регулирования может быть улучшено путем применения более сложного закона регулирования (например, ПИ- вместо И- закона, ПИД - вместо ПИ - закона) и расчета настроек регулятора, обеспечивающих заданные или оптимальные характеристики переходного процесса. В статических системах стабилизации с П- и ПД – регуляторами точность может быть повышена путем увеличения коэффициента передачи регулятора. Введение в закон регулирования интегральной составляющей позволяет получить регулирование без статической ошибки. Качество переходного процесса в динамике может быть дополнительно улучшено введением в закон регулирования дифференциальной составляющей. Однако в некоторых случаях усложнением закона регулирования по основному контуру и расчетам соответствующих коэффициентов закона регулирования невозможно добиться требуемого качества переходных процессов. Тогда приходиться применять дополнительные меры улучшения процесса, одним из которых является введение корректирующих звеньев. Ко многим автомобильным и тракторным приводам (привод сцепления, тормозной привод и др.) наряду с общими требованиями предъявляются два специфических требования: быстродействие и следящее действие. Быстродействие (быстрота протекания переходного процесса) характеризуется временем нарастания давления в исполнительном органе до 0, 9 Основными способами повышения быстродействия и синхронности работы следящих приводов являются: 1) выбор оптимальных проходных сечений трубопроводов, аппаратов привода и их рациональное расположение; 2) использование в цепи дополнительных ускорительных клапанов (каскадов усиления); 3) применение различного вида корректирующих устройств; 4) применение электропневматических или электрогидравлических приводов, в которых командные сигналы передаются с помощью электрических цепей, а силовые функции выполняются пневматическими или гидравлическими устройствами. Применение корректирующих устройств (КУ) является перспективным способом повышения быстродействия следящих приводов. Достоинством большинства КУ является то, что они не требуют значительных усложнений конструкции привода и позволяют существенно повысить быстродействие существующей системы без ухудшения ее статических характеристик и, следовательно, следящего действия. В теории следящих систем под коррекцией понимается замена исходной передаточной функции разомкнутой цепи другой передаточной функцией, соответствующей лучшему качеству системы управления. В применении к пневматическим и гидравлическим системам управления под коррекцией будем понимать использование дополнительных устройств, изменяющих структуру и улучшающих динамические качества (быстродействие) системы. В реальных приводах обычно получается существенное отставание изменяющегося во времени выходного сигнала у от сигнала на входе х. Если
На графике сплошная кривая изображает запаздывание сигнала, что имеет место в обычных приводах. Штриховая линия показывает предварение выходного сигнала после форсирования привода применением КУ. Из графика видно, что значительное опережение получается при быстром изменении воздействий на входе, т.е. при малых значениях По способу включения в систему КУ подразделяют на устройства: · последовательного типа;
· параллельного типа;
· типа местной обратной связи.
Где W(p) означает передаточную функцию основной цепи, W 13. Последовательные КУ. Пусть имеется простейшая цепь, представляющая собой апериодическое звено 1-го порядка. Для повышения быстродействия этой цепи включается последовательно дифференцирующее звено. Результирующая передаточная функция
Члены знаменателя, содержащие р, характеризуют запаздывание сигнала на выходе по отношению к входному сигналу, а члены числителя с р имеются, наоборот, - опережение. Следовательно, по виду передаточной функции можно судить о структуре исследуемой цепи. Если в числителе и знаменателе результирующей передаточной функции члены с р имеются только в знаменателе, цепь во всех случаях работает с отставанием. Сущность последовательного включения КУ рассмотрим на схеме. Воздух под давлением поступает от следящего крана управления 1 по магистрали 2 к исполнительному органу 3. При этом давление В результате последовательного включения КУ (дифференцирующего звена 7) существенно повышается скорость наполнения воздухом исполнительного органа 3, так как цилиндр 3 соединен с близко расположенным к нему ресивером 4. Такое соединение осуществляется с помощью поршня 6. Когда оказывается воздействие на кран управления 1, сжатый воздух поступает в магистраль 2, а также по магистрали 5- в полость А. Полости А и Б соединяются дросселем, вследствие чего создается разница давлений в полостях А и Б и поршень 6 перемещается вниз, открывая полностью клапан 8. С течением времени давление в надпоршневой А и Б полостях выравнивается и под действием пружины поршень 6 и клапан 8 перемещаются вверх, а исполнительный орган 3 соединяется с магистралью 2. Далее управление давлением в исполнительном органе 3 осуществляется с помощью крана 1, как в обычном приводе без КУ.
Таким образом, переходная характеристика привода с КУ существенно улучшается- повышается быстродействие привода при той же характеристике 10 нарастания давления на выходе из крана 1. Чем меньше проходное сечение дросселя в канале, соединяющим А и Б, и чем больше объем полости Б, тем позже возвращается клапан 8 в исходное положение и, следовательно, тем больший эффект действия КУ. Очевидно, что время опережения
14. Параллельные КУ. Это дополнительная корректирующая цепь, включаемая параллельно основной рабочей цепи привода. На вход основной и корректирующей цепей поступает сигнал от крана управления, выходные сигналы обеих цепей складываются или же осуществляется действие лишь той цепи, у которой сигнал на выходе больше. Параллельная корректирующая цепь не форсирует сигнала основной цепи, а в отличие от последовательных КУ вырабатывает дополнительный сигнал в соответствии с законом изменения входного сигнала. Поскольку целью применения рассматриваемых КУ является повышение быстродействия и синхронности работы следящих приводов, действие параллельной корректирующей цепи, подобно последовательным КУ, проявляется только в переходном режиме. В результате изменяется структура(динамические качества) следящей системы. Результирующая передаточная функция параллельно соединенных основной и корректирующей цепей идентична передаточной функции пропорционального звена, охваченного инерционной жесткой отрицательной обратной связью. На рис.5.14 приведены схемы отдельного контура следящего привода с параллельными корректирующими цепями. Привод состоит из следящего крана управления 1, основной магистрали 3 и исполнительного органа 4 с поршнем 5. Пневматическая корректирующая цепь состоит из дифференцирующего устройства 8 с подключенной к нему питающей магистралью 9 и дополнительного цилиндра с поршнем 6. Полость А дифференцирующего устройства подключается трубкой 2 к основной магистрали 3(место подключения выбирается расчетным или экспериментальным путем). Схема цепи с параллельным корректирующим устройством
Корректирующая цепь(рис.5.14, а) работает следующим образом. При воздействии на кран управления повышается давление в магистрали 3 и в полости Г цилиндра 4, причем давление в полости Г изменяется с запаздыванием по сравнению с ростом давления на выходе из крана 1. Это запаздывание зависит от сопротивления магистрали 3, объема полости Г, темпа перемещения органа управления. Интенсивное возрастание давления в начале магистрали 3 и, следовательно, в полости А дифференцирующего устройства 8, вызывает его срабатывание, в результате чего сжатый воздух подается по магистрали 7 в полость В дополнительного цилиндра- силовое воздействие и перемещение исполнительного органа резко возрастают. Дополнительное воздействие КУ осуществляется до тех пор, пока не уравняются давления в полостях А и Б дифференцирующего устройства 8, после этого под действием пружины поршень и клапан возвращаются в исходное положение и магистраль 7 КУ сообщается с атмосферой. Время выдержки давления в трубопроводе 7 и в полости В зависит в основном от сопротивления дросселя, объема полости Б и силы пружины дифференцирующего устройства 8. Возможен вариант исполнительного органа с одним поршнем(рис.5.14, в).В таком случае корректирующая параллельная цепь подключается к основной рабочей полости Г исполнительного органа, воздействия давлений в основной и корректирующей цепи не складываются, как в предыдущих схемах, а в исполнительном органе реализуется давление лишь той цепи, в которой оно больше. 15.КУ в виде обратных связей. Эти КУ в отличие от рассмотренных ранее последовательных и параллельных обеспечивают повышение быстродействия следящего аппарата или цепи за счет полного открытия клапана следящих аппаратов и выдержки его в таком положении некоторое время, по истечении которого действие КУ прекращается. Таким образом, при применении КУ в обратной связи следящего аппарата улучшаются его динамические качества без нарушения следящего действия. Схема цепи с корректирующим устройством в линии обратной связи представлена на рис. Гибкая отрицательная обратной связь действует только в переходном процессе. При охвате апериодического звена 1-го порядка гибкой безинерционной дифер. связью с передаточной функцией
Жесткая безинерционная обратная связь действует как переходном, так и в установившемся процессе. Она обеспечивает снижение выходного давления за давлением на входе, однако скорость изменения выходного давления меньше скорости на входе. Если с целью повышения быстродействия привода требуется форсирование следящего аппарата можно использовать вместо безинерционной инерционную жесткую отрицательную обратную связь. Достоинства типа обратной связи корректирующего устройства наиболее эффективно проявляются лишь при правильном выборе места включения их в приводе. 16. Автоматизация землеройных машин Производственные процессы, выполняемые землеройными машинами сложны и разнообразны. Сопротивление рабочих органов при копании применяются в широких пределах. Все возрастающие требования к качеству земляных работ и улучшения условий труда оператора неизбежно приводят к необходимости автоматизации землеройных машин. При ручном управлении машиной оператор, наблюдая за ходом рабочего процесса, вручную переключает рычаги управления, стремясь обеспечить наивыгоднейшие режими работы, заданные траектории рабочих органов, требуемую последовательность операций. Одновременно он должен учитывать большое количество разнородных и быстро меняющихся факторов (неровность поверхности, механические и физические свойства грунта). Все это делает режим работы оператора чрезвычайно напряженным. Зачастую оператор может оценить изменение внешних условий и результаты работы только глазомером или ориентировочно. Поэтому выбираемые режимы работы далеки от оптимальных, а качество работ часто не удовлетворяют техническим требованиям. Автоматизация землеройных машин предназначена для решения следующих задач: 1. Автоматическое регулирование процесса копания с целью стабилизации какого-либо параметра (мощности, тягового усилия, расхода топлива). 2. Обеспечение безопасности производства работ, ограничение перегрузок, сигнализация о приближении рабочего органа к токонесущему кабелю. 3. Автоматическое ведение рабочего органа планировочных машин по заданной траектории в пространстве. 4. Дистанционное управление землеройными машинами и отдельными агрегатами. 18, 19. Автоматическое регулирование процессов копания Многообразие вариантов существующих конструкций машин для земляных работ можно свести к двум основным группам: машины, выполняющие процессы копания при передвижении (землеройно-транспортные, многоковшовые экскаваторы, рыхлители), и машины, осуществляющие процесс копания при выключенном ходовом механизме (буровые установки, одноковшовые экскаваторы). Автоматическое регулирование процесса копания у машин первой группы может быть осуществлено в основном двумя направлениями: для машин с автоматической трансмиссиями- в основном изменение глубины резания. Системы регулирования процесса копания одноковшовых экскаваторов зависят от вида рабочего оборудования и от задачи регулирования. Наиболее приемлемым способом регулирования процесса копания машин без автоматических трансмиссий можно считать регулирование изменением глубины резания с задачей использования или полной тягловой мощности агрегата, или эффективной мощности двигателя. В первом случае информационным сигналом для применения глубины резания может служить величина буксования двигателя во втором- частота вращения коленчатого вала двигателя. Используя терминологию теории автоматического регулирования, схема автоматического управления машин для земляных работ может быть представлена следующим образом: объект регулирования- машина (бульдозер, скрепер и т.д.). Задача автоматического регулирования- использование максимальной тяговой мощности агрегата или эффективной мощности двигателя путем поддержания максимального тягового сопротивления на рабочем органе при оптимальной скорости передвижения. Регулируемая величина- глубина резания. Устройство обеспечивающее изменение глубины резания- регулирующий орган- механизм подъема ножа. Исходными данными для создания. Система регулирования процесса копания характеризующегося следующими параметрами: 1) возмущающее воздействие- сопротивление на рабочем органе 2) регулируемая величина- глубина резания 3) информационная переменная- величина буксования 4) показатели качества регулирования- быстродействие, устойчивость, динамическая точность воспроизведения входного сигнала. Система регулирования может быть описана дифференциальными управлениями, описывающими поведение системы в переходном состоянии, а также функциональной схемой, отражающей функциональную связь между элементами системы с их статическими характеристиками, позволяющими расчет параметры звеньев. А для этого необходимо разработать принципиальную схему системы управления. Если за информационную переменную принять величину буксования, то ее величину можно определить с помощью либо тахогенераторов, либо объемных ин установленных на колесных осях агрегата. В первом случае получим электрический сигнал, во втором- гидравлический. Мощности этого сигнала будет явно недоставать для управления исполнительным механизмом подъема лопаты или ножа. Поэтому обязательным условием будет наличие усилителя. Рассмотрим гидравлическую систему регулирования процесса копания по сигналу буксования колесных движетелей
А- насос, установленный на ведомом колесе, В- на ведущем. Такая система пригодна для колесных машин (скренеров, грейдеров) при работах, где ограничивающими производительность факторами является ограничения по тяговому усилению (при избытке мощности двигателя). Это характерный режим работы скренера. Для бульдозера такая система непригодна. Для него нужна система регулирования процесса копания по величине загрузки двигателя, т.к. возможности увеличения силы тяги по сцеплению в большинстве случаев превышают возможности двигателя. В этом случае за информационные переменные необходимо взять частоту вращения коленчатого вала двигателя и положение педали подачи топлива. Они однозначно определяют степень загрузки двигателя. Тогда, система управления 20. Автоматизация технологических процессов в дорожном строительстве. Анализируя различные производственные процессы можно разделить все технологические операции на две группы: механические перемещения (транспортирование) и преобразования. Первая группа только организует технологический процесс, вторая активно вмешивается в него, изменяя качественный состав конечного продукта. В соответствии с этим можно выделить и два типа управления: управление перемещениями и управление преобразованиями. Технологическими операциями преобразования это: дозирование материалов, перемешивания, дробления, пропарирование и т.д. Все технологические операции в свою очередь можно разделить на дискретные (порционное взвешивание, циклическое смешивание и т.д.) и непрерывные (сушка, непрерывное дозирование и смешивание). Автоматизация процессов перемещения Для связывания отдельных механизмов и устройств, выполняющих операции технологического преобразования, в единый комплекс служат транспортные средства непрерывного действия- конвейеры, элеваторы, средства пневматического гидравлического транспорта. Средства непрерывного транспорта перемещают сыпучие материалы по определенной трассе без остановок на загрузку и разгрузку. Для автоматизации непрерывных транспортных систем применяются разомкнутые системы управления, функциональное назначение которых сводится к пуску и остановке в определенной последовательности транспортирующих цепей (пуск двигателей в работу должен производиться против направления движения грузопотока во избежание завала транспортных средств материалом, остановка- в направлении грузопотока) и к осуществлению контроля и сигнализации. Системы контроля и сигнализации позволяют управлять операциями аварийного отключения тех или иных агрегатов в случае нарушения нормального хода технологического процесса. Функции систем контроля и сигнализации разнообразны и полностью определяются особенностями поточно-транспортной системы. Включение электроприводов нескольких транспортных цепей в определенной последовательности- наиболее распространенный случай на предприятиях строительной индустрии. Если имеется система нескольких конвейеров, последовательно включенных в транспортный поток, то можно осуществить ряд схем управления с последовательным запуском их приводных электродвигателей вручную, при помощи реле времени или скорости, реле тока или напряжения, логических элементов, а также комбинированного их использования. Такое управление осуществляется на разнообразной элементной базе, в которою входят различные реле, контакторы, путевые выключатели, датчики и преобразователи, усилители различных типов, бесконтактные логические элементы, элементы цифровой и аналоговой вычислительной техники, микропроцессорные устройства, микро- и миниЭВМ. При осуществлении пуска конвейерной линии по времени каждый последующий конвейер включается в работу только по истечению некоторого времени, определяемого из самых неблагоприятных условий работы транспортируемой цепи (предельное падение напряжения в сети, максимальная загрузка конвейеров). Схема управления может быть усложнена исходя из дополнительных требований к технологическому процессу, контролю и сигнализации. Так, должна быть предусмотрена возможность раздельного пуска двигателей при наладке и опробовании системы, а также аварийная остановка любого из конвейеров. При пуске конвейеров по току каждый последующий двигатель включается в работу токовым реле, получающим питание от цепи пуска предыдущего двигателя, когда ток в ней уменьшится до установленного значения. Пуск конвейерной цепи можно осуществить и при помощи реле скорости, когда срабатывание каждого последующего пускателя будет определяться скоростью движения рабочих органов уже включенного конвейера. В системах управления электроприводами, осуществляющими сложные функции, используются устройства электронно-вычислительной техники, среди которых все более важная роль отводится микропроцессорам. В таких системах управления релейно-контакторная аппаратура, управляемая микропроцессором, используется для подключения питания силовых блоков, для организации защит и блокировок, ввода первоначальных и конечных команд в систему управления электроприводом. 21, 22. Автоматизация технологических процессов в дорожном строительстве. Анализируя различные производственные процессы можно разделить все технологические операции на две группы: механические перемещения (транспортирование) и преобразования. Первая группа только организует технологический процесс, вторая активно вмешивается в него, изменяя качественный состав конечного продукта. В соответствии с этим можно выделить и два типа управления: управление перемещениями и управление преобразованиями. Технологическими операциями преобразования это: дозирование материалов, перемешивания, дробления, пропарирование и т.д. Все технологические операции в свою очередь можно разделить на дискретные (порционное взвешивание, циклическое смешивание и т.д.) и непрерывные (сушка, непрерывное дозирование и смешивание). Популярное:
|
Последнее изменение этой страницы: 2016-04-10; Просмотров: 2885; Нарушение авторского права страницы
 κ об, постоянная времени Тоб и время запаздывания τ об.
κ об, постоянная времени Тоб и время запаздывания τ об. =20% (б), колебательный процесс с минимизацией показателя колебательности m по критерию
=20% (б), колебательный процесс с минимизацией показателя колебательности m по критерию 

 , выраженное в процентах хода регулирующего органа. Другие возмущения выражаются в эквивалентном перемещении регулирующего органа, вызывающего такое же изменение регулируемой величины.
, выраженное в процентах хода регулирующего органа. Другие возмущения выражаются в эквивалентном перемещении регулирующего органа, вызывающего такое же изменение регулируемой величины. ; 2) допустимую статическую ошибку
; 2) допустимую статическую ошибку  ; 3) допустимое динамическое отклонение
; 3) допустимое динамическое отклонение  .
.
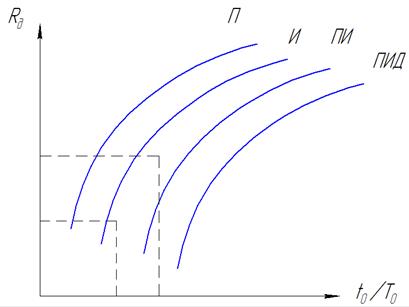
 и
и  находят точку, соответствующую определенному закону регулирования. Точка может принадлежать не одному, а нескольким законам регулирования. Затем определяют параметры настроек регулятора в соответствии с таблицей 10.3
находят точку, соответствующую определенному закону регулирования. Точка может принадлежать не одному, а нескольким законам регулирования. Затем определяют параметры настроек регулятора в соответствии с таблицей 10.3

















 и статической ошибки
и статической ошибки  . Если они не удовлетворяют исходным требованиям, меняют закон регулирования или тип переходного процесса.
. Если они не удовлетворяют исходным требованиям, меняют закон регулирования или тип переходного процесса. , отсчитываемом от момента начала резкого перемещения органа управления. Под следящим действием понимается способность привода или системы обеспечивать в установившемся режиме пропорциональное изменение выходного сигнала при произвольном изменение входного. Быстродействие является одним из показателей качества переходного процесса в системе и сильно влияет на эффективность работы многих систем.
, отсчитываемом от момента начала резкого перемещения органа управления. Под следящим действием понимается способность привода или системы обеспечивать в установившемся режиме пропорциональное изменение выходного сигнала при произвольном изменение входного. Быстродействие является одним из показателей качества переходного процесса в системе и сильно влияет на эффективность работы многих систем. - время изменения входного сигнала и
- время изменения входного сигнала и  - время изменения выходного сигнала на 0, 9
- время изменения выходного сигнала на 0, 9  , то разность
, то разность  при положительном ∆ t называется временем предварения. Если же эта разность отрицательна, (
при положительном ∆ t называется временем предварения. Если же эта разность отрицательна, ( 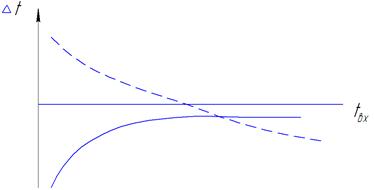
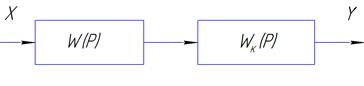
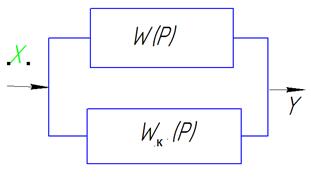

 (p) - передаточную функцию корректирующего звена. Целесообразность того или иного способа включения КУ в систему определяется удобством технического осуществления и эффективностью действия устройства.
(p) - передаточную функцию корректирующего звена. Целесообразность того или иного способа включения КУ в систему определяется удобством технического осуществления и эффективностью действия устройства.
 на выходе крана управления 1 нарастает по кривой 10, а в исполнительном органе 3- по кривой 11.
на выходе крана управления 1 нарастает по кривой 10, а в исполнительном органе 3- по кривой 11. различно при разных темпах воздействия на кран 1, при более медленных воздействиях
различно при разных темпах воздействия на кран 1, при более медленных воздействиях  уменьшается и динамическая характеристика привода с КУ приближается к характеристике исходного привода(кривые 10 и 11). При медленных процессах управления КУ не срабатывает вследствие равенства давлений в плоскостях А и Б дифференцирующего устройства и действие КУ не проявляется. Таким образом, КУ не влияет на следящее действие и на работу привода при медленных процессах управления, корректирует (улучшает) лишь динамическую характеристику.
уменьшается и динамическая характеристика привода с КУ приближается к характеристике исходного привода(кривые 10 и 11). При медленных процессах управления КУ не срабатывает вследствие равенства давлений в плоскостях А и Б дифференцирующего устройства и действие КУ не проявляется. Таким образом, КУ не влияет на следящее действие и на работу привода при медленных процессах управления, корректирует (улучшает) лишь динамическую характеристику.